СЛ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Прицепной скрепер | 1985 |
|
SU1266933A1 |
| Рабочий орган землеройно-транспортной машины | 1984 |
|
SU1217996A1 |
| Рабочее оборудование подводного планировщика | 1988 |
|
SU1535954A1 |
| Автогрейдер | 1986 |
|
SU1490315A1 |
| Ковш скрепера | 1983 |
|
SU1086082A1 |
| Стенд для испытаний металлоконструкций землеройной машины | 1982 |
|
SU1112252A1 |
| Рабочее оборудование бульдозера | 1985 |
|
SU1298313A1 |
| Бульдозер | 1988 |
|
SU1573113A2 |
| Рабочее оборудование скрепера | 1989 |
|
SU1694790A1 |
| Скрепер | 1989 |
|
SU1710669A1 |
Изобретение относится к землеройно-транспортным машинам и позволяет повысить надежность работы рабочего органа. Он содержит поперечную раму 1, установленные на ней ползуны 2, секции подножевой плиты /ПП/ 5 и гидроаккумуляторы 14. Ползуны 2 соединены с рамой 1 через гидроцилиндры /ГЦ/ 3. Секции ПП 5 шарнирно соединены с ползунами 2 и через тяги связаны с рамой 1. Тяги выполнены в виде дополнительных ГЦ 7. Штоки ГЦ 7 соединены с секциями ПП 5, корпуса - с рамой 1, а штоковые полости - с гидроаккумуляторами 14. Последние имеют систему подпитки. Поршневые полости ГЦ 7 через гидропреобразователь 10 давления соединены с рабочими полостями ГЦ 3. С началом взаимодействия режущего ножа 6 с грунтом усилие передается через ПП 5 и ползун 2 на штоки ГЦ 3. Вследствие неравномерности прочностных свойств грунта и влияния скола грунта это усилие меняется по величине и имеет пилообразный характер. При этом поршни ГЦ 3, вытесняя рабочую жидкость /РЖ/ в полость 11 гидропреобразователя 10, опускают поршни последнего вниз. Из полости 9 РЖ поступает в полости ГЦ 7 и выдвигает их штоки. Они поворачивают ПП 5, а РЖ из полостей ГЦ 7 вытесняется в гидроакуумулятор 14. 2 ил.
Изобретение относится к землеройно- транспортным машинам, а именно к гидроприводам скреперов, бульдозеров и т.п. мэ- шин.
Целью изобретения является повышение надежности работы рабочего органа.
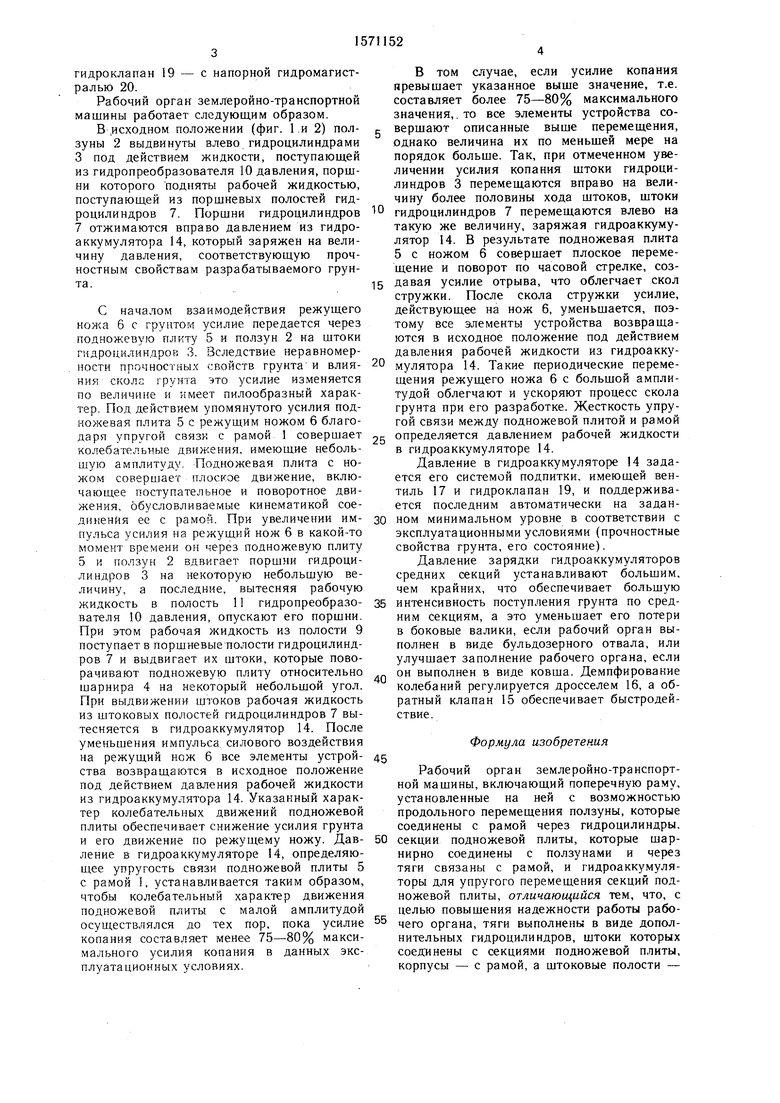
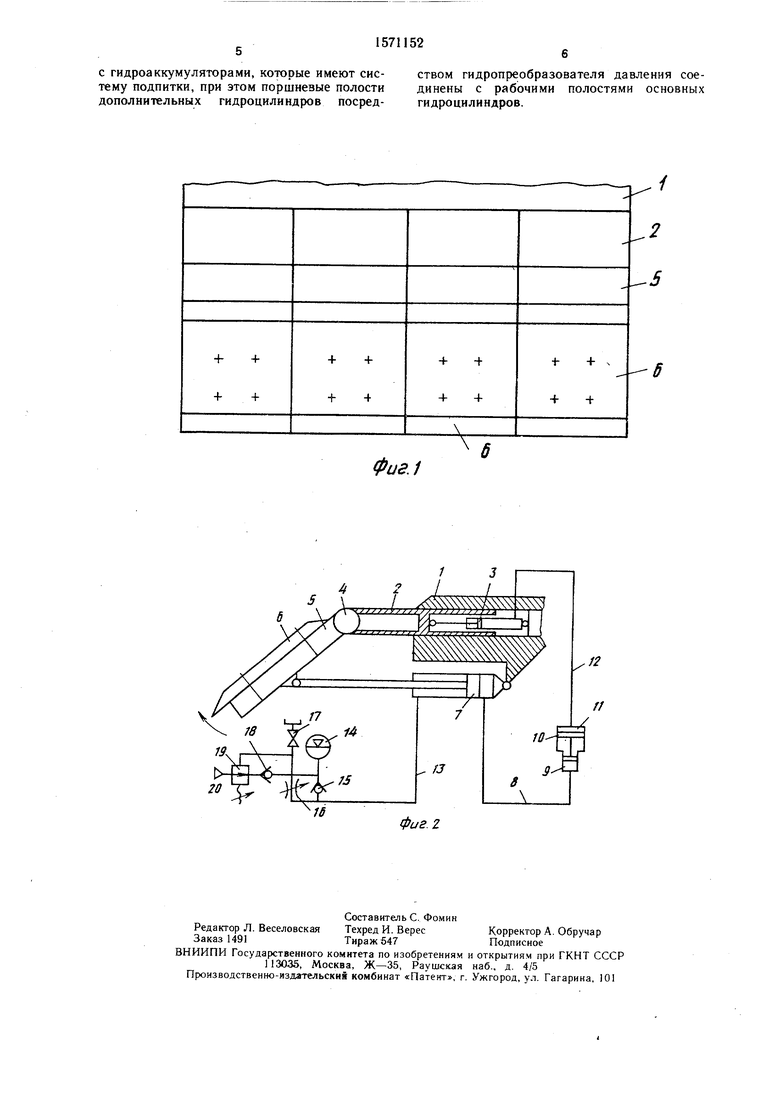
На фиг. 1 изображен секционный рабочий орган землеройно-транспортной машины; на фиг. 2 - сечение одной из его секций и гидросхема.
Рабочий орган землеройно-транспортной машины содержит раму 1, в направляющих которой установлены ползуны 2 каждой из секций. Ползуны 2 задними концами соединены со штоками гидроцилиндров 3, закрепленных корпусами на раме 1, а передними концами посредством шарниров 4 соединены с подножевой плитой 5, на которой закреплены режущие ножи 6. По1- ножевая плита 5 каждой секции шарнирно соединена со штоками дополнительных гидроцилиндров 7, шарнирно соединенных корпусами с рамой 1. Поршневые полости гидроцилиндров 7 сообщены гидролинней 8 с полостью 9 высокого давления гидропреобразователя 10 давления, полость 11 низкого давления которого сообщена гидролинией 12 с поршневыми полостями гидроцилиндров 3 этой же секции. Штоковые полости гидроцилиндров 7 каждой секции сообщены гидролинией 13 с гидроаккумулятором 14 через обратный клапан 15 и регулируемый дроссель 16. Гидроаккумулятор 14 каждой секции сообщен через вентиль 17 со сливом, а через последовательно включенные обратный клапан 18 и
СП N5
гидроклапан 19 - с напорной гидромагистралью 20.
Рабочий орган землеройно-транспортной машины работает следующим образом.
В .исходном положении (фиг. 1 и 2) ползуны 2 выдвинуты влево гидроцилиндрами 3 под действием жидкости, поступающей из гидропреобразователя 10 давления, поршни которого подняты рабочей жидкостью, поступающей из поршневых полостей гидроцилиндров 7. Поршни гидроцилиндров 7 отжимаются вправо давлением из гидроаккумулятора 14, который заряжен на величину давления, соответствующую прочностным свойствам разрабатываемого грунта.
С началом взаимодействия режущего ножа 6 с грунтом усилие передается через подножевую плиту 5 и ползун 2 на штоки гидроцилиндров 3. Вследствие неравномерности прочноеnibix свойств грунта и влияния скола ipynia это усилие изменяется по величине к имеет пилообразный характер Под действием упомянутого усилия под- иожевая плита 5 с режущим ножом 6 благодаря упругой связи с рамой 1 совершает колебательные движения, имеющие небольшую амплитуду Подножевая плита с ножом совершает плоское движение, включающее поступательное и поворотное движения, обусловливаемые кинематикой соединения ее с рамоч. При увеличении импульса усилия на режущий нож 6 в какой-то момент времени он через подножевую плиту 5 и ползун 2 вдвигает поршни гидроцилиндров 3 на некоторую небольшую величину, а последние, вытесняя рабочую жидкость в полость 11 гидропреобразователя 10 давления, опускают его поршни. При этом рабочая жидкость из полости 9 поступает в поршневые полости гидроцилиндров 7 и выдвигает их штоки, которые поворачивают подножевую плиту относительно шарнира 4 на некоторый небольшой угол. При выдвижении штоков рабочая жидкость из штоковых полостей гидроцилиндров 7 вытесняется в гидроаккумулятор 14. После уменьшения импульса силового воздействия на режущий нож 6 все элементы устройства возвращаются в исходное положение под действием давления рабочей жидкости из гидроаккумулятора 14. Указанный характер колебательных движений подножевой плиты обеспечивает снижение усилия грунта и его движение по режущему ножу. Давление в гидроаккумуляторе 14, определяющее упругость связи подножевой плиты 5 с рамой , устанавливается таким образом, чтобы колебательный характер движения подножевой плиты с малой амплитудой осуществлялся до тех пор, пока усилие копания составляет менее 75-80% максимального усилия копания в данных эксплуатационных условиях.
В том случае, если усилие копания превышает указанное выше значение, т.е. составляет более 75-80% максимального значения, то все элементы устройства совершают описанные выше перемещения, однако величина их по меньшей мере на порядок больше. Так, при отмеченном увеличении усилия копания штоки гидроцилиндров 3 перемещаются вправо на величину более половины хода штоков, штоки
° гидроцилиндров 7 перемещаются влево на такую же величину, заряжая гидроаккумулятор 14. В результате подножевая плита 5 с ножом 6 совершает плоское перемещение и поворот по часовой стрелке, создавая усилие отрыва, что облегчает скол стружки. После скола стружки усилие, действующее на нож 6, уменьшается, поэтому все элементы устройства возвращаются в исходное положение под действием давления рабочей жидкости из гидроакку0 мулятора 14. Такие периодические перемещения режущего ножа 6 с большой амплитудой облегчают и ускоряют процесс скола грунта при его разработке. Жесткость упругой связи между подножевой плитой и рамой
5 определяется давлением рабочей жидкости в гидроаккумуляторе 14.
Давление в гкдроаккумуляторе 14 задается его системой подпитки, имеющей вентиль 17 и гидроклапан 19, и поддерживается последним автоматически на задан0 ном минимальном уровне в соответствии с эксплуатационными условиями (прочностные свойства грунта, его состояние).
Давление зарядки гидроаккумуляторов средних секций устанавливают большим, чем крайних, что обеспечивает большую
5 интенсивность поступления грунта по средним секциям, а это уменьшает его потери в боковые валики, если рабочий орган выполнен в виде бульдозерного отвала, или улучшает заполнение рабочего органа, если
0 он выполнен в виде ковша. Демпфирование колебаний регулируется дросселем 16, а обратный клапан 15 обеспечивает быстродействие.
Формула изобретения
Рабочий орган землеройно-транспортной машины, включающий поперечную раму, установленные на ней с возможностью продольного перемещения ползуны, которые соединены с рамой через гидроцилиндры. секции подножевой плиты, которые шар- нирно соединены с ползунами и через тяги связаны с рамой, и гидроаккумуляторы для упругого перемещения секций подножевой плиты, отличающийся тем, что, с целью повышения надежности работы рабочего органа, тяги выполнены в виде дополнительных гидроцилиндров, штоки которых соединены с секциями подножевой плиты, корпусы - с рамой, а штоковые полости -
с гидроаккумуляторами, которые имеют систему подпитки, при этом поршневые полости дополнительных гидроцилиндров посредством гидропреобразователя давления соединены с рабочими полостями основных гидро цилиндров.
фиг.1
фиг. 2
| Рабочий орган землеройно-транспортной машины | 1984 |
|
SU1217996A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
