Выполненного в переходнике 1 9, и дроссельного- отверстия 20, расположенного в штоковой полости 17. В от- йерстии 18 размещен регулируемый t Дроссель с коническим регулирующим элементом 21, выполненным в виде усеченного конуса и жестко связанным с поршнем 15. Соосно с поршнем 15 расположен упругий элемент в виде JQ пружины 22, расположенный в камере 23, установленной с возможностью контак- ta со штоком ГД 14. Через гидрозамок 31 ГД 1, 2 и 14 соединены с гидро- бистемой управления, при этом камера з
управления клапана давления соединена, с поршневыми полостями ГД через регулируемый дроссель. При подъеме корпуса 5 рабочая жидкость через гидрозамок 31 по гидролинии 1Р нагнетается в поршневые полости 6, 8 ГД 1, 2, а штоковые полости 7,9 при этом через гидрозамок 31 соединены через гидролинию 11 со сливом. В результате ГД 1, 2 раздвигаются и забойная сторона корпуса 5 комбайна посредством опорных лыж поднимается. 2 ил.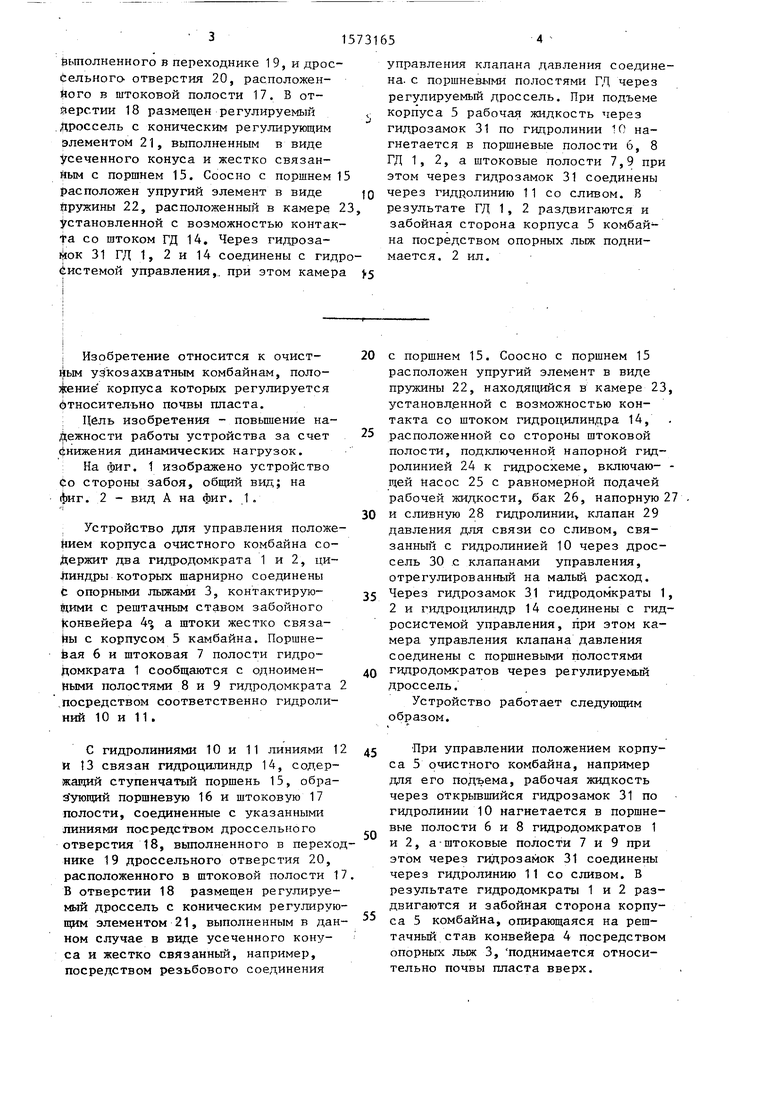


| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический механизм подачи очистного комбайна | 1987 |
|
SU1469131A1 |
| Устройство для удержания угледобывающего комбайна | 1989 |
|
SU1776789A1 |
| Устройство для регулирования положения исполнительного органа выемочных комбайнов | 1978 |
|
SU735767A1 |
| Устройство для удержания приводной станции струговой установки | 1988 |
|
SU1696691A1 |
| ГИДРОФИЦИРОВАННАЯ КРЕПЬ С РЕГУЛИРУЕМЫМ СОПРОТИВЛЕНИЕМ И РЕКУПЕРАЦИЕЙ ЭНЕРГИИ | 2012 |
|
RU2510460C2 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| ГИДРОФИЦИРОВАННАЯ КРЕПЬ С ДРОССЕЛИРУЮЩИМ РАСПРЕДЕЛИТЕЛЕМ И РЕКУПЕРАЦИЕЙ ЭНЕРГИИ | 2012 |
|
RU2503816C1 |
| Механизм подачи горной машины | 1989 |
|
SU1691520A1 |
| Устройство для регулирования положения исполнительного органа горной машины | 1987 |
|
SU1461910A1 |
| Устройство для управления положением исполнительного органа очистного комбайна | 1984 |
|
SU1190023A1 |
Изобретение относится к очистным узкозахватным комбайнам, положение корпусов которых регулируется относительно почвы пласта. Цель - повышение надежности устройства за счет снижения динамических нагрузок. Устройство для управления положением корпуса очистного комбайна включает опорные лыжи 3, шарнирно соединенные с гидродомкратами /ГД/ 1,2. Поршневая 6 и штоковая 7 полости ГД 1 сообщаются с одноименными полостями 8, 9 ГД 2 посредством гидролиний 10, 11. С последними линиями 12, 13 связан ГД 14 со ступенчатым поршнем, образующим поршневую и штоковую 16, 17 полости, соединенные с указанными линиями посредством дроссельного отверстия 18, выполненного в переходнике 19, и дроссельного отверстия 20, расположенного в штоковой полости 17. В отверстии 18 размещен регулируемый дроссель с коническим регулирующим элементом 21, выполненным в виде усеченного конуса и жестко связанным с поршнем 15. Соосно с поршнем 15 расположен упругий элемент в виде пружины 22, расположенный в камере 23, установленной с возможностью контакта со штоком ГД 14. Через гидрозамок 31 ГД 1, 2 и 14 соединены с гидросистемой управления, при этом камера управления клапана давления соединена с поршневыми полостями ГД через регулируемый дроссель. При подъеме корпуса 5 рабочая жидкость через гидрозамок 31 по гидролинии 10 нагнетается в поршневые полости 6, 8 ГД 1, 2, а штоковые полости 7, 9 при этом через гидрозамок 31 соединены через гидролинию 11 со сливом. В результате ГД 1, 2 раздвигаются и забойная сторона корпуса 5 комбайна посредством опорных лыж поднимается. 2 ил.
Изобретение относится к очистным узкозахватным комбайнам, поло- сение корпуса которых регулируется относительно почвы пласта.
Цель изобретения - повышение надежности работы устройства за счет снижения динамических нагрузок.
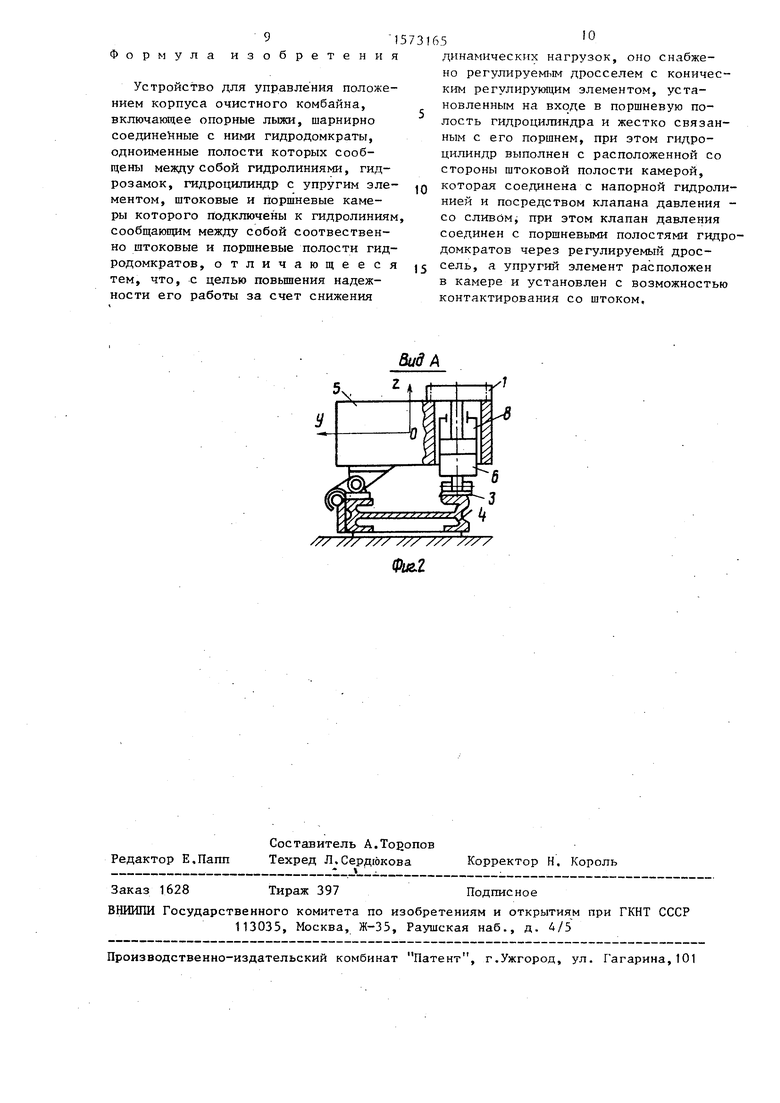
На фиг. 1 изображено устройство Со стороны забоя, общий вид; на фиг. 2 - вид А на фиг. 1.
Устройство для управления положением корпуса очистного комбайна содержит два гидродомкрата 1 и 2, цилиндры которых шарнирно соединены С опорными лыжами 3, контактирующими с рештачным ставом забойного Конвейера 4° а штоки жестко связа- йы с корпусом 5 камбайна. Поршневая 6 и штоковая 7 полости гидродомкрата 1 сообщаются с одноименными полостями 8 и 9 гидродомкрата 2 посредством соответственно гидролиний 10 и 11.
С гидролиниями 10 и 11 линиями 12 и 13 связан гидроцилиндр 14, содержащий ступенчатый поршень 15, обра- з ующий поршневую 16 и штоковую 17 полости, соединенные с указанными линиями посредством дроссельного отверстия 18, выполненного в переходнике 19 дроссельного отверстия 20, расположенного в штоковой полости 17 В отверстии 18 размещен регулируемый дроссель с коническим регулирующим элементом 21, выполненным в данном случае в виде усеченного конуса и жестко связанный, например, посредством резьбового соединения
с поршнем 15. Соосно с поршнем 15 расположен упругий элемент в виде пружины 22, находящийся в камере 23, установленной с возможностью контакта со штоком гидроцилиндра 14,
расположенной со стороны штоковой
полости, подключенной напорной гидролинией 24 к гидросхеме, включаю- - рдей насос 25 с равномерной подачей рабочей жидкости, бак 26, напорную 27
и сливную 28 гидролинии,, клапан 29 давления для связи со сливом, связанный с гидролинией 10 через дроссель 30 с клапанами управления, отрегулированный на малый расход.
Через гидрозамок 31 гидродомкраты 1, 2 и гидроцилиндр 14 соединены с гидросистемой управления, при этом камера управления клапана давления соединены с поршневыми полостями
гидродомкратов через регулируемый дроссель.
Устройство работает следующим образом.
При управлении положением корпуса 5 очистного комбайна, например для его подъема, рабочая жидкость через открывшийся гидрозамок 31 по гидролинии 10 нагнетается в поршневые полости 6 и 8 гидродомкратов 1 и 2, а штоковые полости 7 и 9 при этом через гидрозамок 31 соединены через гидролинию 11 со сливом. В результате гидродомкраты 1 и 2 раздвигаются и забойная сторона корпуса 5 комбайна, опирающаяся на реш- тачный став конвейера 4 посредством опорных лыж 3, поднимается относительно почвы пласта вверх.
5
При опускании корпуса 5 комбайна рабочая жидкость через открывшийся гидрозамок 31 нагнетается по гидролинии 11 в штоковые полости 7 и 9 гидродомкратов 1 и 2, а их поршневые полости 6 и 8 при этом посредством гидролинии 10 соединяются со сливом.
В обоих случаях с напорной и сливной гидролиниями соединяются также соответствующие полости гидроцилиндра 14, а в его камере 23 формируется давление, обусловненное средним уровнем давления рабочей жидкости в поршневых полостях 6 и 8 гидродомкратов 1 и 2. Гидроцилиндр 14 при этом не оказывает влияния на процесс подъема или опускания корпуса машины.
Гидроцилиндр 14 с упругим 22 и запорным 21 элементами оказывают существенное влияние на динамические свойства устройства, если регулирование положением корпуса 5 комбайна осуществляется в процессе разрушения машиной угольного массива, когда в регулируемых опорах формируются динамические нагрузки. При этом демпфирование динамических нагрузок осуществляется таким же образом, как и при работе устройства в случае отсутствия управляющих воздействий со стороны оператора по регулированию корпуса комбайна в пространстве.
При отсутствии управляющих воздействий со стороны оператора поршневые 6 и 8, штоковые 7 и 9 полости гидродомкратов 1 и 2, поршневая 16 и штоковая 17 полости гидроцилиндра 14 отключаются от гидросистемы управления посредством гидрозамка 31 В этом случае,как и при регулировании положением корпуса 5, на упругий элемент 22 действует сила FCp , величина которой определяется уровнем среднего давления Рср в поршневых полостях 6 и 8 гидродомкратов 1 и 2. При изменении средних составляющих нагрузок формирующихся в регулируемых опорах, что возможно в процессе работы комбайна, произойдет одновременное изменение величины Pcj, в поршневой полости 16 и в камере 23 гидроцилиндра 14. Таким образом, подключение клапана 29 давления, входящего в состав гидросхемы с постоянно работающим насосом 25
10
15
20
25
30
35
40
45
50
55
1ГГ)6
с равномерной подачей рабочей жидкости, через дроссель 30, отрегулированный на малый расход, к гидропинии 10, соединяющей поршневые полости 6 и 8 гидродомкратов 1 и 2, позволяет автоматически производить разгрузку упругого элемента 22 гидроцилиндра 14 в функции изменения средних нагрузок в опорных лыжах 3.
При разрушении угольного массива в рабочих режамах формируются динамические колебания корпуса 5 комбайна вдоль оси Z, относительно осей X и Y.
Гидролинии 12 и 13 гидроцилиндра 14 подключены к гидролиниям 10 и 11 посередине между гидродомкратами 1 и 2. В этом случае упругий элемент 22 будет реагировать только на колебания корпуса 5 относительно оси X и вдоль оси Z.
При колебаниях корпуса 5 комбайна относительно оси X и вдоль оси Z на гидродомкраты 1 и 2 будут действовать попеременные составляющие реакций, которые в каждый конкретный момент времени будут равны между собой по модулю и одинаково направлены. При этом мгновенные значения давлений рабочей жидкости в одноименных полостях гидродомкратов 1 и 2 вследствие работы последних по схеме сообщающихся сосудов также будут равны между собой.
Рассмотрим указанный процесс в динамике. Например, при увеличении реакций в опорных лыжах 3 в первом полупериоде колебаний (нагрузка относительно среднего значения возрастает) давление рабочей жидкости в поршневых полостях 6, 8 и 16 увеличивается, а в штоковых полостях 7, 9 и 17 уменьшается. Давление же в камере 23 благодаря дросселю 30, отрегулированному на малый расход, что позволяет отсекать динамические составляющие давления на клапане 29, не изменится и по прежнему будет равно Рс„ . В этом случае поршень 15 с запорным элементом 21 переместится относительно среднего положения „ влево, вызвав общую деформацию упругого элемента 22 1„в 1Сп . При этом на упругий элемент 22 действует сила
F (Рп- Sn
где Рп, Рш, Sn, 5Ш
Sn Pjj 3) РСр(1)
- соответственно
уровень давления в рассматриваемый момент времени в поршневой (п) и
штоковой (ш) полости гидроцилиндра 1 и площади этих полостей; SK - площадь поперечного сечения поршня 15 со стороны камеры 23.
Объем поршневой полости 16 будет увеличиваться и в нее через дроссельное отверстие 18, выполненное в переходнике 19, по гидролиниям 10 и 12 поступает рабочая жидкость из поршневых полостей 6 и 8 гидродомкратов 1 и 2, а вытесняется рабочая жидкость из штоковой полости 17 поршня 15 через дроссельные отверстия 20 по гидролиниям 13 и 11 посту- пает в штоковые полости 7 и 9 гидродомкратов 1 и 2. При увеличении объема поршневой полости 16 происходит перемещение влево запорного элемента 21 относительно дроссельно- ,го отверстия 18. При этом сечение (дроссельного отверстия 18 уменына- ется при увеличении нагрузки на плунжер 15 и увеличивается при уменьшении нагрузки, обусловливая автома- тическую функциональную зависимость изменения диссипативных свойств системы от величины изменения динамической нагрузки в опорных лыжах 3.
При деформации упругого элемен
та 22 на величину lu,6 объем камеры 23 уменьшается и рабочая жидкость вытесняется в гидролинии 24 и 27 и далее через клапан 29 и сливную гидролинию 28 попадает в бак 26.
При уменьшении реакций в опорных пыжах 3 во втором полупериоде колебаний (нагрузка относительно среднего значения уменьшается) давление рабочей жидкости в поршневых полостях 6, 8 и 16 уменьшается, а в што- Ковых полостях 7, 9 и 17 увеличивается. При этом упругий элемент 22 гироцилиндра 14 под воздействием запасенной потенциальной энергии начнет разжиматься, а поток рабочей жидкости в гидролиниях 10 и 11 изменит свое направление на противополоное. Плунжер 15 с запорным элементом 21 переместится вправо относително среднего положения 1Ср . При этом общая деформация упругого элемента 22 примет значение, равное Iyw 1 со- С учетом того, что давление в камере 23 не изменилось, сила, вызвавшая деформацию упругого элемента 22, будет определяться иэ йыражения (1) при сформировавшихся
в рассматриваемый момент времени значениях давлений РП, РШ.
Если принять гармонический закон изменения динамической составляющей опорных реакций комбайна, то для рассмотренных выше колебаний его корпуса можно произвести оценку на- груженности упругого элемента в известном и предлагаемом устройствах.
Максимальное усилие Р.л„ . воемел кс
принимаемое упругим элементом в известном устройстве,равно
макс ср
+ FQ- sin CO t,
где Рд - амплитуда гармонической
составляющей; СО - круговая циклическая
частота; t - время.
При разгрузке упругого элемента в предлагаемом устройстве на величину Fp Fc - F (что обеспечивается определенным соотношением плоS
2Fn
щадей g D имеем РМ(ЯКС-
Если учесть при этом, что коэффициент вариации нагрузок , например, в регулируемых опорах комбайна 1ГШ68 для представительных режимов его работы в основном не превышает 0,2, то эффект разгрузки упругого элемента в предлагаемом устройстве очевиден. Действительно, зная,что для периодического закона изменения динамических составляющих
нагрузок
}
32S FPD
откуда
, и приняв для оценF г™--3-
ср -4Г - О
ки -0 0,2, получаем FCp 3,54 F, что составляет для известного уст 4,54 Fa, т.е. макмакс
ройства F симальное усилие на упругий элемент в предлагаемом устройстве приблизительно в 2,3 раза меньше, чем в известном.
5
Таким образом, предлагаемая конструкция в отличие от известной позволяет как при подъеме, опускании корпуса 5, так и при колебаниях корпуса 5 комбайна относительно оси X и вдоль оси Z при разрушении уголь- кого массива снизить нагрузку на упругий элемент 22 гидроцилиндра 14 на величину Рс,- S, как это видно
из (1).
Cf
915731
Формула изобретения
Устройство для управления положением корпуса очистного комбайна, включающее опорные лыжи, шарнирно соединенные с ними гидродомкраты, одноименные полости которых сообщены между собой гидролиниями, гидрозамок, гидроцилиндр с упругим элементом, штоковые и поршневые камеры которого подключены к гидролиниям, сообщающим между собой соотвествен- но штоковые и поршневые полости гидродомкратов, отличающееся тем, что, с целью повышения надежности его работы за счет снижения
5V
65
10
0
5
динамических нагрузок, оно снабжено регулируемым дросселем с коническим регулирующим элементом, установленным на входе в поршневую полость гидроцилиндра и жестко связанным с его поршнем, при этом гидроцилиндр выполнен с расположенной со стороны штоковой полости камерой, которая соединена с напорной гидролинией и посредством клапана давления - со сливом, при этом клапан давления соединен с поршневыми полостями гидродомкратов через регулируемый дроссель, а упругий элемент расположен в камере и установлен с возможностью контактирования со штоком.
Вид А
| Устройство для управления очистным комбайном в вертикальной плоскости | 1980 |
|
SU935614A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР N 1184940, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
