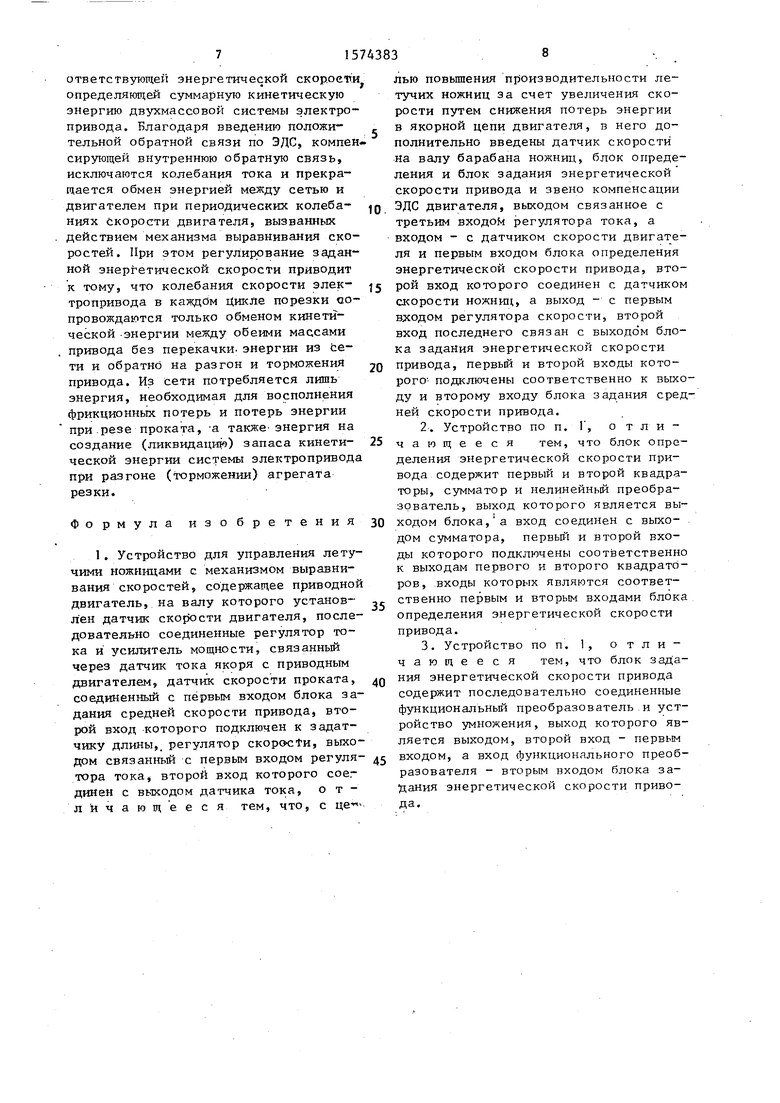
соединенные блок 9 задания средней скорости и блок 10 задания энергетической скорости, управляемые от чика 11 длины. В контур регулирования тока двигателя входят регулятор 12 тока, усилитель 13 мощности, двигатель 1 и датчик 14 тока. В конту регулирования энергетической скорости привода входят регулятор 15 скорости, датчик 4 скорости двигателя и датчик 5 скорости ножниц, а также блок 16 определения энергетической скорости. Канал компенсации внутренней обратной связи по ЭДС двигателя содержит звено 17 компенсации ЭДС.
Блок 16 определения энергетической скорости содержит квадраторы 18 и 19, сумматор 20 и нелинейный преобразова
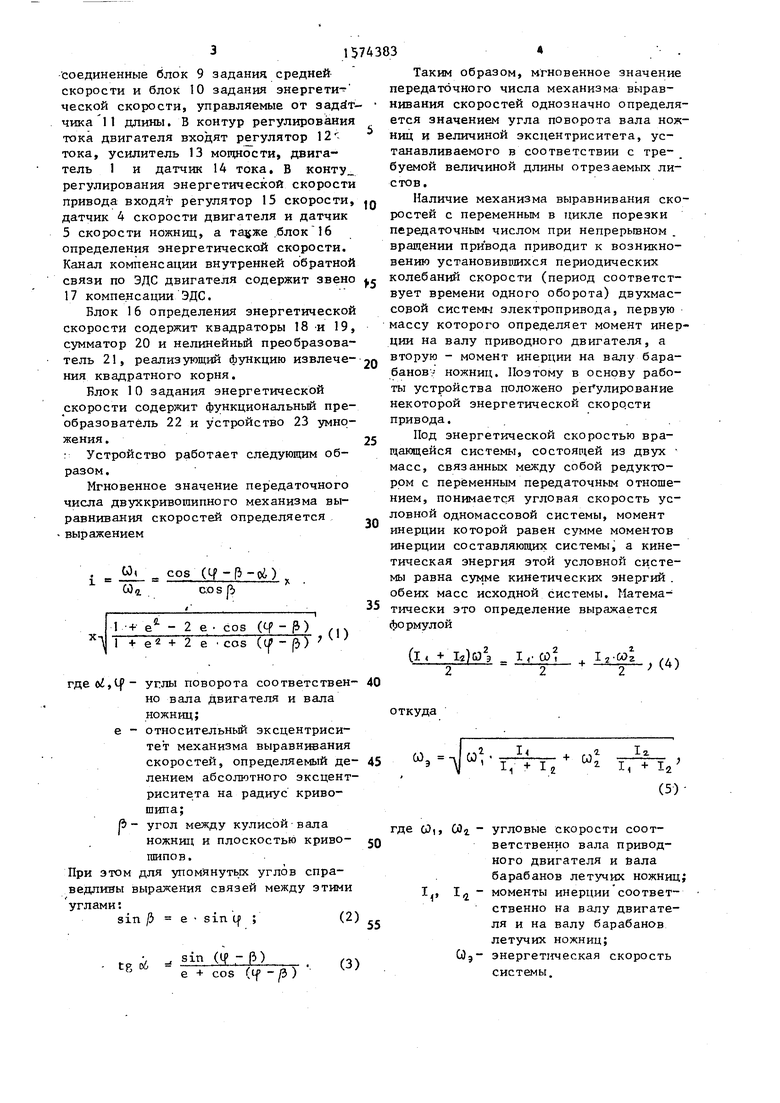
Таким образом, мгновенное значение передаточного числа механизма выравнивания скоростей однозначно определяется значением угла поворота вала ножниц и величиной эксцентриситета, устанавливаемого в соответствии с требуемой величиной длины отрезаемых листов.
Наличие механизма выравнивания скоростей с переменным в цикле порезки передаточным числом при непрерывном вращении привода приводит к возникновению установившихся периодических колебаний скорости (период соответствует времени одного оборота) двухмас- совой системы электропривода, первую массу которого определяет момент инерции на валу приводного двигателя, а

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления летучими ножницами с механизмом выравнивая скоростей | 1990 |
|
SU1712077A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712079A2 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Устройство управления летучими ножницами ,работающими в режиме непрерывного вращения | 1987 |
|
SU1440627A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1685635A1 |
| Устройство управления летучими ножницами, работающими в режиме непрерывного вращения | 1988 |
|
SU1519855A2 |
| Устройство управления электропроводом летучих ножниц | 1987 |
|
SU1532209A1 |
| Способ управления электроприводом летучих ножниц | 1986 |
|
SU1382603A1 |


Изобретение относится к машиностроению, а именно к системам управления оборудованием летучих ножниц, снабженных механизмом выравнивания скоростей. Цель изобретения - повышение производительности летучих ножниц за счет увеличения скорости путем снижения потерь энергии в якорной цепи двигателя. Устройство содержит летучие ножницы с механизмом выравнивания скоростей, электропривод, датчики скорости двигателя и проката, задатчик длины, регулятор скорости, а также блок задания средней скорости привода. Снижение потерь энергии достигается за счет введения в привод звена компенсации ЭДС двигателя, датчика скорости ножниц и блоков задания и определения энергетической скорости привода, определяющих суммарную кинетическую энергию двухмассовой системы привода. При этом колебания скорости привода в каждом цикле порезки, вызванные действием механизма выравнивания скоростей, сопровождаются только обменом кинетической энергией между обеими массами без перекачки энергии из сетки и обратно на разгон и замедление привода. Из сети энергия потребляется только на восполнение фрикционных потерь и потерь энергии при резке проката. 2 з.п. ф-лы, 3 ил.
тель 21, реализующий функцию извлече- 20 ВТ°РУЮ момент инерции на валу барабанов- ножниц. Поэтому в основу работы устройства положено регулирование некоторой энергетической скорости привода.
ния квадратного корня.
Блок 10 задания энергетической скорости содержит функциональный преобразователь 22 и устройство 23 умножения .
Устройство работает следующим образом.
Мгновенное значение передаточного числа двухкривошипного механизма выравнивания скоростей определяется . выражением
х,(
40
Ј,lf- углы поворота соответственно вала двигателя и вала ножниц;
е - относительный эксцентриситет механизма выравнивания скоростей, определяемый де- 45 лением абсолютного эксцентриситета на радиус кривошипа;
fb - угол между кулисой вала ножниц и плоскостью кривошипов.
этом для упомянутых углов спраивы выражения связей между этими ми:
sin f е sin q ;
50
(2)
55
tR Di sin Of .- ft)
e + cos (f -/3 )
(3)
0 ВТ°РУЮ момент инерции на валу бара5
0
5
банов- ножниц. Поэтому в основу работы устройства положено регулирование некоторой энергетической скорости привода.
Под энергетической скоростью вращающейся системы, состоящей из двух масс, связанных между собой редуктором с переменным передаточным отношением, понимается угловая скорость условной одномассовой системы, момент инерции которой равен сумме моментов инерции составляющих системы, а кинетическая энергия этой условной системы равна сумме кинетических энергий обеих масс исходной системы. Математически это определение выражается фо рмулой
(l + Ig)cj
- « CD
I 2 Wz
(4)
откуда
где 03,, C0a - угловые скорости соответственно вала приводного двигателя и вала барабанов летучих ножниц; 1{, 1% моменты инерции соответственно на валу двигателя и на валу барабанов летучих ножниц; 03Э энергетическая скорость системы.
Блок 6 определения энергетической скорости системы на основании выходных сигналов со, и ОЭг датчика 4 скорости двигателя и датчика 5 скорости нож-i ниц при помощи квадраторов 18 и 1 9, сум- матора 20 и нелинейного преобразователя 21 формирует в соответствии с выражением (5) сигнал обратной связи (0 при ре- гулированик энергетической скорости системы. Для эффективного регулирования энергетической скорости требуется блокировать обмен энергией между сетью и двигателем при колебаниях в цикле порезки его ЭДС, вызванных соответ ствующими колебаниями его скорости (двигатель постоянного тока с независимым возбуждением). С этой целью в предлагаемом устройстве введено звено 17 компенсации ЭДС, Лорнирующее сигнал ЕК положительной обратной связи по ЭДС в соответствии с передаточной функцией
,., - -к
ТМР
е 1 +
Кр коэффициент пропорциональности между ЭДС и угловой сЛо- ростью двигателя; сумма малых некомпенсируемых постоянных времени в контуре регулирования тока.
%Порезка проката на заданные мерные длины осуществляется за счет регулирования требуемого соотношения средней за цикл порезки угловой скорости привода и скорости проката в соответствии с выражением
V
«с 2п Ј ,
где V - скорость проката;
L - заданная длина порезки. Выражение (7) реализуется в блоке 9 задания средней скорости.
При известной заданной средней скорости электропривода в условиях регулирования его энергетической скорости следует определить связь между ними, чтобы обеспечить переход от задания средней со Р скорости к заданию энергетической С3эскорости привода. Эта связь устанавливается следующим образом. Обозначив fl Ij,/,, лз (5) с учетом (I) можно получить выражение для мгновенного значения угловой ско5 (}, (х)э г ., т анов 203836
рости вала ножниц через энергетическую скорость:
1 +
4L(cf) +fl
(8)
(}, (х)э г т анов
Поскольку мгновенное значение передаточного числа Ј механизма выравнивания скоростей при принятой длине порезки, т.е. при фиксированном эксцентриситете, согласно (I), (2), (3) зависит только от угла поворота вала летучих ножниц, то средняя за цикл порезки скорость этого вала определяется интегрированием за весь оборот выражения для мгновенной скорости этого вала:
(}, а ано
Wc
25
л|12(ср
(9)
+ fl
Так как характер зависимости мгно- венного значения передаточного числа механизма выравнивания скоростей от угла поворота вала барабанов летучих ножниц согласно (1) определяется толь ко величиной эксцентриситета механиэ- ма выравнивания скоростей, т.е. заданной длиной порезки, то коэффициент, вызывающий среднюю скорость .привода с его энергетической скоростью для привода с известным значением величи- ны fl , является однозначной функцией длины порезки:
(J, 10,
1
45
Т F
J л
dtp
) +fl
6VF(L),
(10)
В блоке 10 задания энергетической скорости привода при помощи Функционального преобразователя 22 и узла 23 умножения реализуется соотношение (l 0), Таким образом, при обеспечении за- данной длины порезки за счет поддержания соответствующей средней скорости привода осуществляется в то же ,время определение и регулирование соответетвующей энергетической скорости определяющей суммарную кинетическую энергию двухмассовой системы электропривода. Благодаря введению положительной обратной связи по ЭДС, компен сирующеи внутреннюю обратную связь, исключаются колебания тока и прекращается обмен энергией между сетью и двигателем при периодических колеба- ниях скорости двигателя, вызванных действием механизма выравнивания скоростей. При этом регулирование заданной энергетической скорости приводит к тому, что колебания скорости элек- тропривода в каждом Цикле порезки сопровождаются только обменом кинетической энергии между обеими массами привода без перекачки, энергии из сети и обратно на разгон и торможения привода. Из сети потребляется лишь энергия, необходимая для восполнения фрикционных потерь и потерь энергии при резе проката, а также энергия на создание (ликвидацию) запаса кинети- ческой энергии системы электропривода при разгоне (торможении) агрегата резки.
Формула изобретения
лью повышения производительности летучих ножниц за счет увеличения скорости путем снижения потерь энергии в якорной цепи двигателя, в него дополнительно введены датчик скорости на валу барабана ножниц, блок определения и блок задания энергетической скорости привода и звено компенсации ЭДС двигателя, выходом связанное с третьим входом регулятора тока, а входом - с датчиком скорости двигателя и первым входом блока определения энергетической скорости привода, второй вход которого соединен с датчиком скорости ножниц, а выход - с первым входом регулятора скорости, второй вход последнего связан с выходом блока задания энергетической скорости привода, первый и второй входы которого подключены соответственно к выходу и второму входу блока задания средней скорости привода.
Ггщ
47
Фиг.З
| Устройство управления летучими ножницами ,работающими в режиме непрерывного вращения | 1987 |
|
SU1440627A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
