Использование в этом устройстве датчика скорости на валу ножниц, звена компенсации ЭДС двигателя, блоков задания и определения энергетической скорости двигателя обеспечивает расчет и регулирование заданной энергетической скорости системы, определяющей суммарную кинетическую энергию двухмассовой системы электропривода. При этом колебания скорости привода в каждом цикле порезки, вызванные действием механизма выравнивания скоростей, сопровождаются только обменом кинетической энергией между обеими массами без перекачки энергии из сети в систему электропривода и обратно на разгон и замедление вращающихся масс в цикле порезки. Из сети потребляется энергия только на восполнение фрикционных потерь и потерь энергии при резе проката, что обеспечивает существенное снижение потерь в якорной цепи приводного электродвигателя, снижает его нагрев и создает предпосылки для роста производительности участка порезки.
Недостатком такого устройства является его пониженная надежность,в работе, обусловленная наличием датчика скорости на валу барабанов ножниц, где он испытывает значительную циклическую ударную нагрузку от резов проката, что отрицательно сказывается на его работоспособности.
Цель изобретения - упрощение устройства и повышение его надежности.
Поставленная цель достигается тем, что в устройство управления летучими ножницами с механизмом выравнивания, скоростей введен датчик реза, выход которого подсоединен к третьему входу блока определения энергетической скорости, второй вход которого подсоединен к выходу задатчика длины, а блок определения энергетической скорости выполнен в виде последовательно соединенных интегратора, функционального преобразователя и устройства умножения, выход которого является выходом блока, информационный вход интегратора и второй вход устройства умножения являются первым входом блока определения энергетической скорости, вход обнуления интегратора является третьим входом блока, а второй вход функционального преобразователя - вторым входом блока определения энергетической скорости.
Наличие в устройстве датчика реза, фиксирующего момент реза, а также построение блока определения энергетической скорости на основе интегратора, функционального преобразователя и устройства умножения, что позволило непрерывно вычислять энергетическую скорость двухмассовой системы по текущим значениям скорости двигателя и передаточного числа МВС, которое однозначно определяется углом поворота вала двигателя относительно точки реза и заданной длиной отрезаемого проката. Такое определение сигнала энергетической скорости двухмассовой системы позволяет отказаться от датчика скорости на валу барабанов ЛН, работающего в условиях значительных циклических ударных нагрузок, что в итоге приводит к упрощению устройства и повышению его надежности.
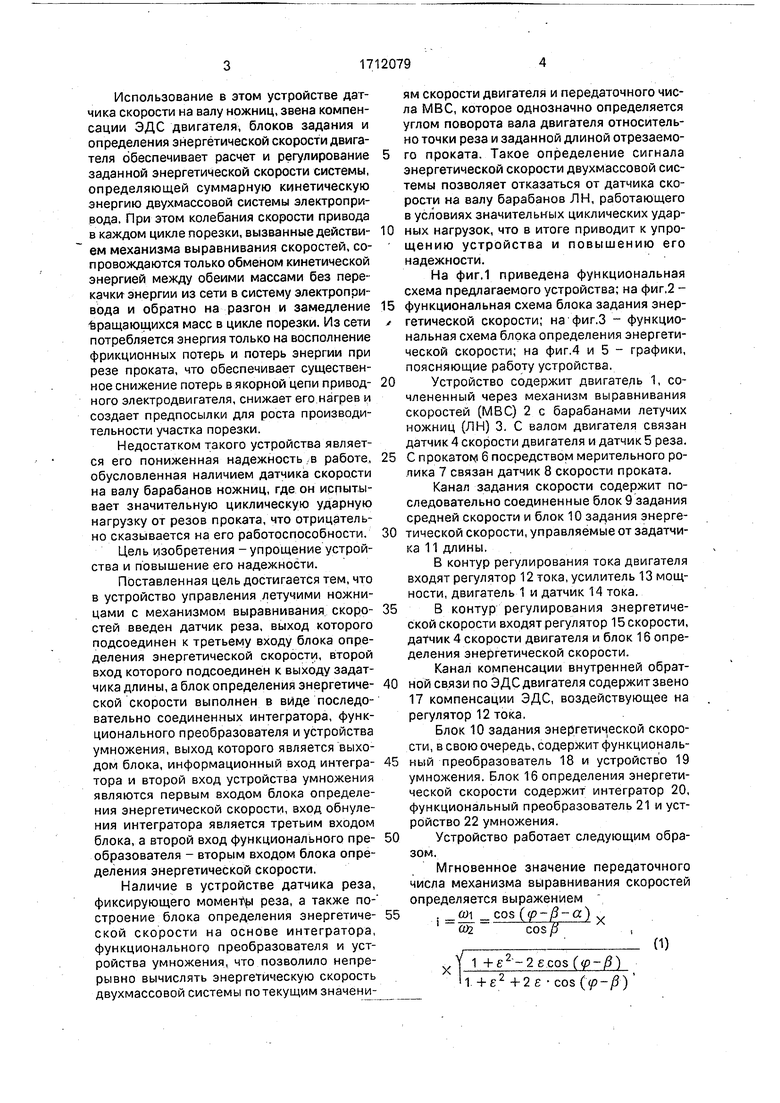
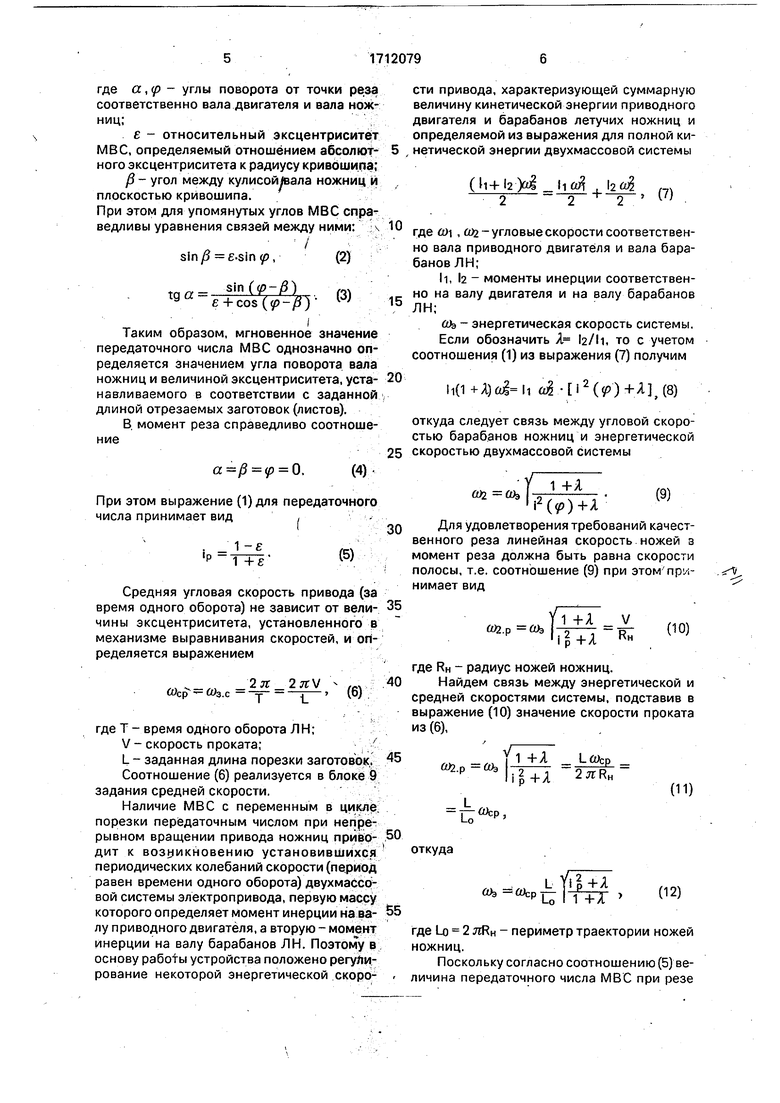
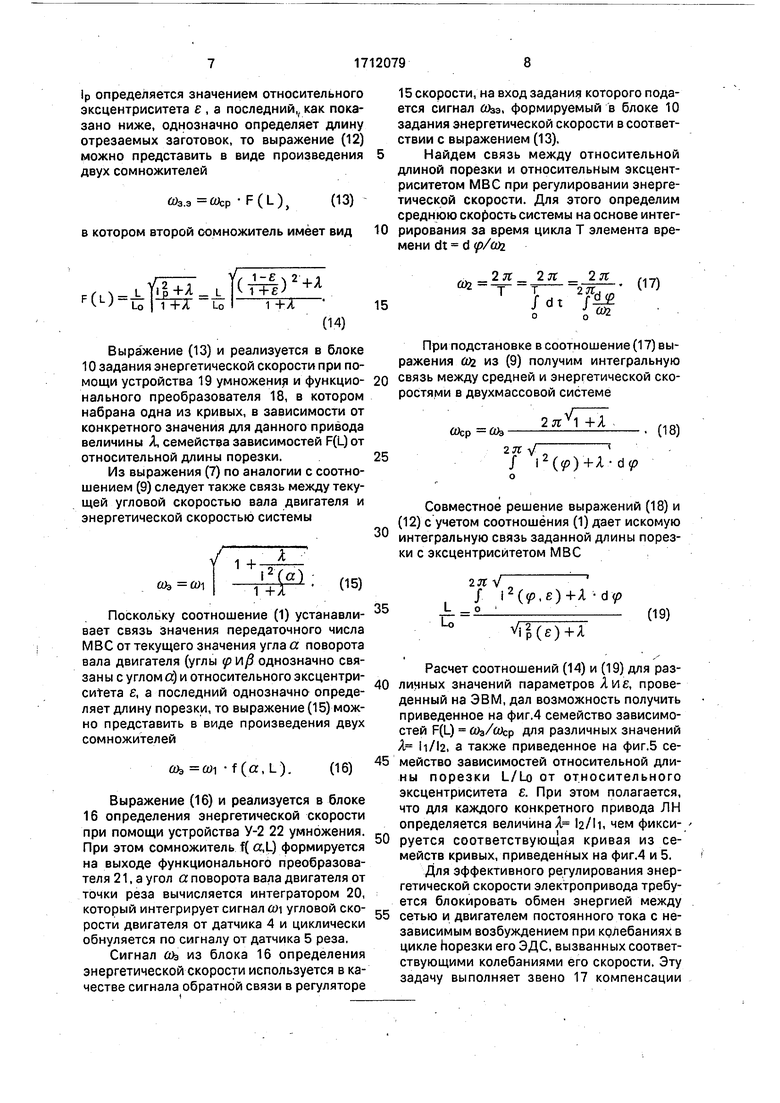
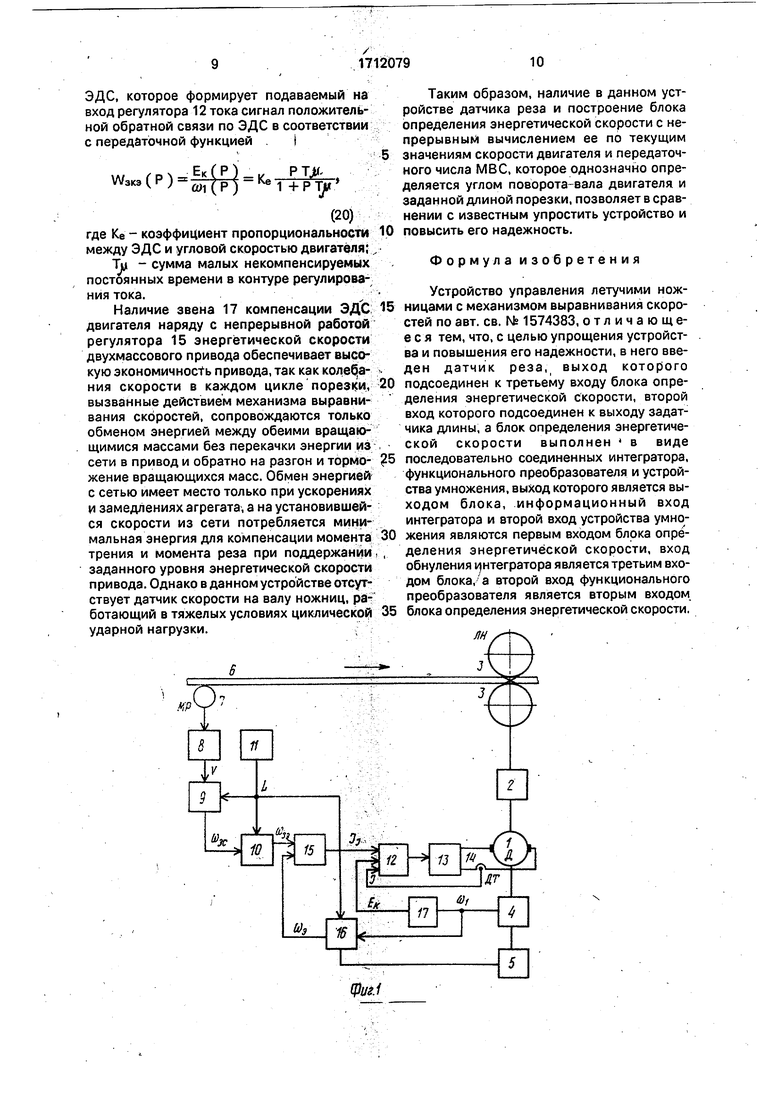
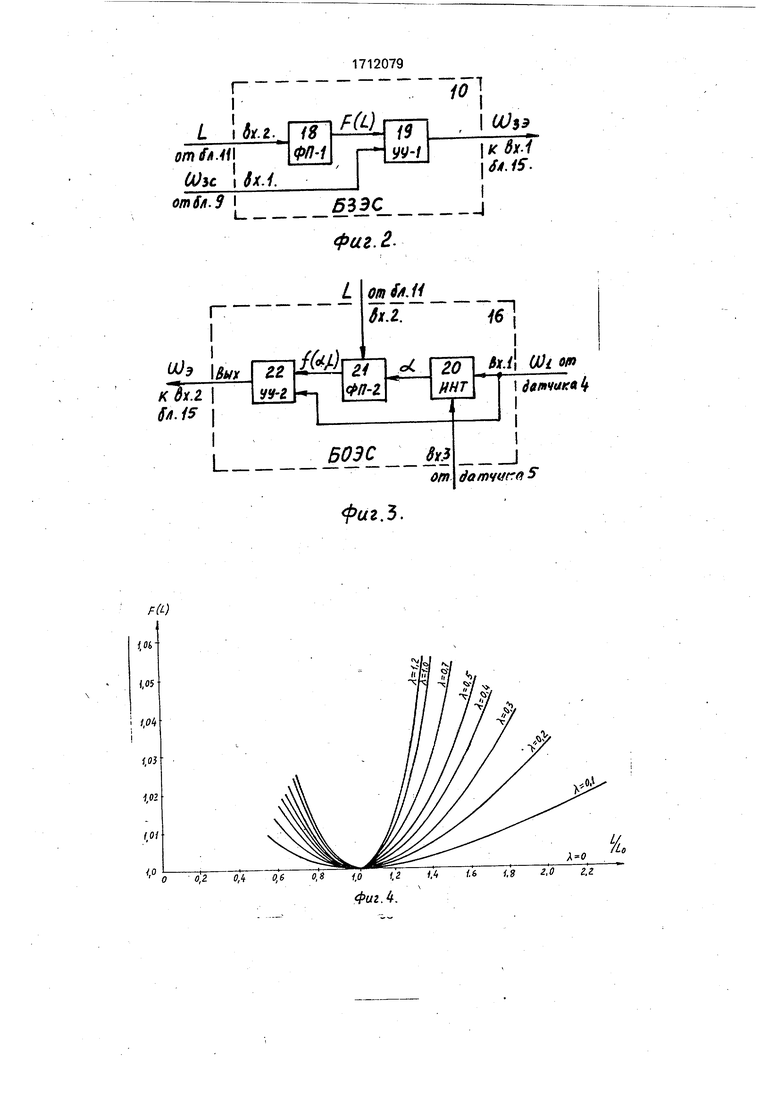
На фиг.1 приведена функциональная схема предлагаемого устройства; на фиг,2 функциональная схема блока задания энергетической скорости; на фиг.З - функциональная схема блока определения энергетической скорости; на фиг.4 и 5 - графики, поясняющие работу устройства.
Устройство содержит двигатель 1, сочлененный через механизм выравнивания скоростей (МВС) 2 с барабанами летучих ножниц (ЛИ) 3. С валом двигателя связан датчик 4 скорости двигателя и датчик 5 реза. С прокато1у| 6 посредством мерительного ролика 7 связан датчик 8 скорости проката.
Канал задания скорости содержит последовательно соединенные блок 9 задания средней скорости и блок 10 задания энергетической скорости, управляемые от задатчика 11 длины.
В контур регулирования тока двигателя входят регулятор 12 тока, усилитель 13 мощности, двигатель 1 и датчик 14 тока.
В контур регулирования энергетической скорости входят регулятор 15 скорости, датчик 4 скорости двигателя и блок 16 определения энергетической скорости.
Канал компенсации внутренней обратной связи по ЭДС двигателя содержит звено 17 компенсации ЭДС, воздействующее на регулятор 12 тока,
Блок 10 задания энергетической скорости, в свою очередь, содержит функциональный преобразователь 18 и устройство 19 умножения. Блок 16 определения энергетической скорости содержит интегратор 20, функциональный преобразователь 21 и устройство 22 умножения.
Устройство работает следующим образом.
Мгновенное значение передаточного числа механизма выравнивания скоростей определяется выражением
. UJ1 cos (() у
а)2cos
0)
1 )
X 1. Ч-е 4-2 COS (р-р) где а,(р - углы поворота от точки реза соответственно вала двигателя и вала ножниц;:е - относительный эксцентриситет MB С, определяемый отношением абсолютного эксцентриситета к радиусу кривбшипа; /3- угол между кулисой Аала ножниц и плоскостью кривошипа. При этом для упомянутых углов МВС справедливы уравнения связей между ними: sin/5 .sin (р, sin((p-j3) е +COS (-/S) Таким образом, мгновенное значение передаточного числа МВС однозначно определяется значением угла поворота вала ножниц и величиной эксцентриситета, устанавливаемого в соответствии с заданной длиной отрезаемых заготовок (листов). В, момент реза справедливо соотношение 0. При этом выражение (1) для передаточного числа принимает вид, Средняя угловая скорость привода (за время одного оборота) не зависит от величины эксцентриситета, установленного в механизме выравнивания скоростей, и определяется выражением ft).c -Y где Т - время одного оборота ЛН; V - скорость проката; L - заданная длина порезки заготовок. Соотношение (6) реализуется в блоке 9 задания средней скорости. Наличие МВС с переменным в цикле, порезки пер18даточным числом при непрерывном вращении привода ножниц приводит к возуикйовению установившихся периодических колебаний скорости (период равен времени одного оборота) двухмассовой системы электропривода, первую массу которого определяет момент инерции на валу приводного двигателя, а вторую - момент инерции на валу барабанов ЛН. Поэтому в основу pa6otbi устройства положено регулирование некоторой энергетической скорости привода, характеризующей суммарную величину кинетической энергии приводного двигателя и барабанов летучих ножниц и определяемой из выражения для полной кинетической энергии двухмассовой системы (tl+l2)ft| 11йЯ 12 й 2 2 2 где , ft)2 угловые скорости соответственно вала приводного двигателя и вала барабанов ЛН; Н, 12 - моменты инерции соответственно на валу двигателя и на валу барабанов ЛН; УЭ - энергетическая скорость системы. Если обозначить Я 2/, то с учетом соотношения (1) из выражения (7) получим li(1+A) (АЛ(р}+,(Ъ) откуда следует связь между угловой скоростью барабанов ножниц и энергетической скоростью двухмассовой системы Ь г()+Я Для удовлетворения требований качественного реза линейная скорость ножей в момент реза должна быть равна скорости полосы, т.е. соотношение (9) при этомпринимает вид (10) №2.р йЪ где RH - радиус ножей ножниц. Найдем связь между энергетической и средней скоростями системы, подставив в выражение (10) значение скорости проката из (6), откуда где 1-0 2 лЯн - периметр траектории ножей ножниц. Поскольку согласно соотношению (5) величина передаточного числа МВС при резе
ip определяется значением относительного эксцентриситета , а последний, как показано ниже, однозначно определяет длину отрезаемых заготовок, то выражение (12) можно представить в виде произведения двух сомножителей
0)з.э(0ср F(L),(13)
в котором второй сомножитель имеет вид
15 скорости, на вход задания которого подается сигнал (Озэ, формируемый в блоке 10 задания энергетической скорости в соответствии с выражением (13).
Найдем связь между относительной
длиной порезки и относительным эксцентриситетом МВС при регулировании энергетической скорости. Для этого определим среднюю скорость системы на основе интегрирования за время цикла Т элемента времени dt d (р/а
.V, 2л: 2л: 2л:
(17)
0)
- Ти
Выражение (13) и реализуется в блоке 10 задания знергетической скорости при помощи устройства 19 умножени и функционального преобразователя 18, в котором набрана одна из кривых, в зависимости от конкретного значения для данного привода величины А, семейства зависимостей F(L) от относительной длины порезки.
Из выражения (7) по аналогии с соотношением (9) следует также связь между текущей угловой скоростью вала двигателя и энергетической скоростью системы
1 +ШД1;
(15)
Wi
1+Я
Поскольку соотношение (1) устанавливает связь Значения передаточного числа МВС от текущего значения угла а поворота вала двигателя (углы однозначно связаны с углом ее) и относительного эксцентриситета е, а последний однозначно определяет длину порезки, то выражение (15) можно представить в виде произведения двух сомножителей
Q)) f («, L).
(16)
Выражение (16) и реализуется в блоке 16 определения энергетической скорости при помощи устройства У-2 22 умножения. При этом сомножитель f( а,1) формируется на выходе функционального преобразователя 21, а угол а поворота вала двигателя от точки реза вычисляется интегратором 20, который интегрирует сигнал (Ui угловой скорости двигателя от датчика 4 и циклически обнуляется по сигналу от датчика 5 реза.
Сигнал Шэ из блока 16 определения энергетической скорости используется в качестве сигнала обратной связи в регуляторе
При подстановке в соотношение (17) выражения UJ2 из (9) получим интегральную 20 связь между средней и энергетической скоростями в двухмассовой системе
Ч-Я (18)
OJcp ftJb
27Г
/ r()+A-dv
о
Совместное решение выражений (18) и (12) с учетом соотношения (1) дает искомую интегральную связь заданной длины порезки с эксцентриситетом МВС
2л: vT / Г (,е)-1-А dv
(19)
Vi2(e)+A
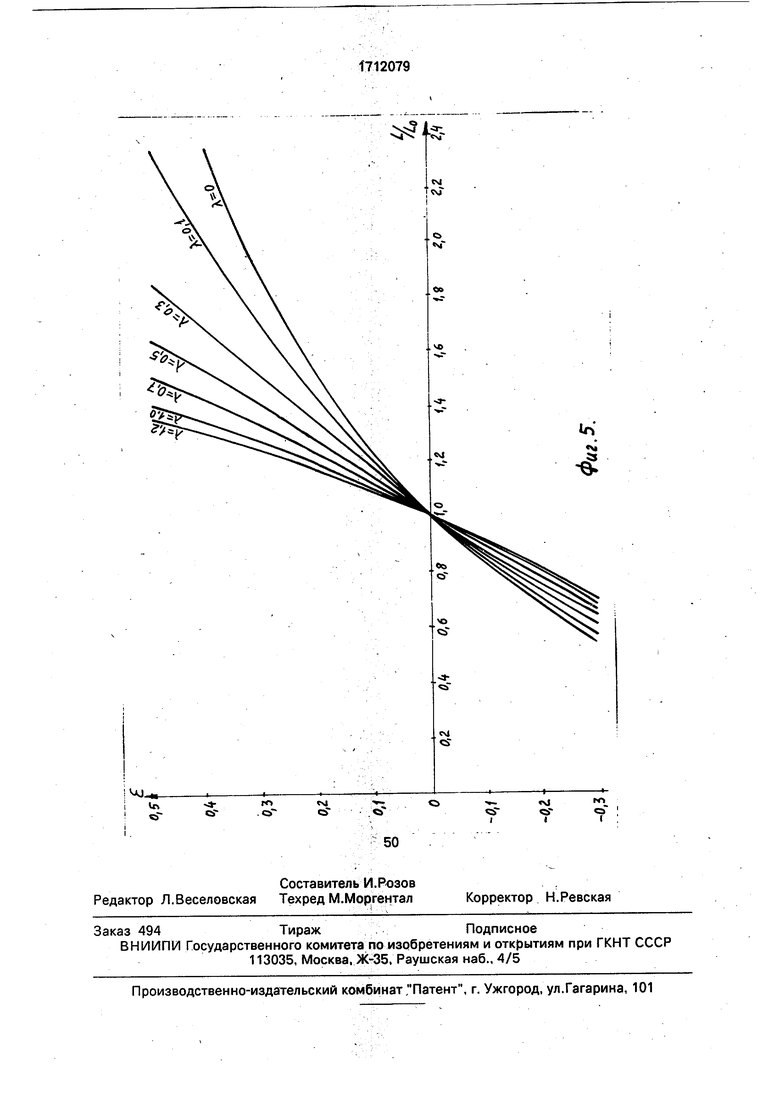
Расчет соотношений (14) и (19) для различных значений параметров Аие, проведенный на ЭВМ, дал возможность получить приведенное на фиг.4 семейство зависимостей F(L) (Ua/ftfep для различных значений Ii/l2, а также приведенное на фиг.5 семейство зависимостей относительной длины порезки L/LO от относительного эксцентриситета . При этом полагается, что для каждого конкретного привода ЛН определяется величина Я l2/Ii, чем фиксируется соответствующая кривая из семейств кривых, приведенных на фиг.4 и 5.
Для эффективного регулирования энергетической скорости электропривода требуется блокировать обмен анергией между
сетью и двигателем постоянного тока с независимым возбуждением при крлебанияхв цикле Ьорезки его ЭДС, вызванных соответствующими колебаниями его скорости. Эту задачу выполняет звено 17 компенсации ЭДС, которое формирует подаваемый на вход регулятора 12 тока сигнал положительной обратной связи по ЭДС в соответствии с передаточной функцией , ) : Ек ( Р ) ., PTJU W3K3 ( Р ) Wi ( Р ) 1 +PT}f где Ке коэффициент пропорциональности между ЭДС и угловой скоростью двигателя; Ти - сумма малых некомпенсируемых постоянных времени в контуре регулирования тока. Наличие звена 17 компенсации ЭДС: двигателя наряду с непрерывной работой регулятора 15 энергетической скорости двухмассового привода обеспечивает высокую экономичность привода, так как коле ания скорости в каждом цикле порезки, вызванные действием механизма выравнивания скоростей, сопровождаются только обменом энергией между обеими вращающимися массами без перекачки энергии из сети в привод и обратно на разгон и торможение вращающихся масс. Обмен энергией с сетью имеет место только при ускорениях и замедлениях агрегата, а на установившейся скорости из сети потребляется минимальная энергия для компенсации момента трения и момента реза при поддержании заданного уровня энергетической скорости привода. Однако в данном устройстве отсутствует датчик скорости на валу ножниц, работающий в тяжелых условиях циклической ударной нагрузки. Таким образом, наличие в данном устройстве датчика реза и построение блока определения энергетической скорости с непрерывным вычислением ее по текущим значениям скорости двигателя и передаточного числа МВС, которое однозначно определяется углом поворота-вала двигателя и заданной длиной порезки, позволяет в сравнении с известным упростить устройство и повысить его надежность. Формула изобретения Устройство управления летучими ножницами с механизмом выравнивания скоростей по авт. св. № 1574383, отличающее с я тем, что, с целью упрощения устройства и повышения его надежности, в него введен датчик реза, выход которого подсоединен к третьему входу блока определения энергетической скорости, второй вход которого подсоединен к выходу задатчика длины, а блок определения энергетической скорости выполнен в виде последовательно соединенных интегратора, функционального преобразователя и устройства умножения, выход которого является выходом блока, информационный вход интегратора и второй вход устройства умножения являются первым входом блока определения энергетической скорости, вход обнуления v HTerpaTOpa является третьим входом блока,а второй вход функционального преобразователя является вторым входом блока определения энергетической скорости.
;53ЭСI
фиг. 2
Г
I
I
(э вы, Фп-г
вх.г
A.15 I
БОЭС
фиг.Ъ.
«, 6п,г.
I
JT./I Ш{ от
го
г1
ИНТ
I
(У.З
I
ifa/nv /rf
OffI
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления летучими ножницами с механизмом выравнивая скоростей | 1990 |
|
SU1712077A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1988 |
|
SU1574383A1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |
| Устройство управления летучими ножницами, работающими в режиме непрерывного вращения | 1988 |
|
SU1519855A2 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1685635A1 |
| Устройство управления летучими ножницами ,работающими в режиме непрерывного вращения | 1987 |
|
SU1440627A1 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Система управления электроприводом летучих ножниц | 1986 |
|
SU1433657A1 |
Изобретение относится к машиностроению, а именно к системам управления оборудованием летучих ножниц, производйщцх порезку проката на заданные длины на ходу и снабженных механизмом выравнивания скоростей ножей ножниц и проката в мд- мент реза. Цель изобретения - упрощениеустройства и повышение его надежности. Устройство содержит двигатель 1 постоянного тока, сочлененный с барабанами летучих ножниц через механизм выравнивания скоростей, датчики скорости проката' 8 и двигатели 4, блок 9 задания средней скорости, блоки задания 10 и определения 16 энергетической скорости, задатчик 16 длины, регуляторькскорости 15 и тока 12, усилитель 13 мощности, датчик 14 тока, звено 17 компенсации ЭДС двигателя и датчик реза. Блок 16 определения энергетической скорости обеспечивает формирование.сигнала обратной связи без датчика на валу барабо- нов ножниц, работающего в тяжелых условиях циклической ударной нагрузки, что повышает надежность устройства, Опреде-. ление энергетической скорости производится в соответствии с законом сохранения суммарной кинетической энергии двухмассо- вой системы по текущим значениям скорости двигателя и передаточного числа механизма выравнивания скоростей, которое однозначно определяется углом поворота вала двигателя относительно точки реза и заданной длиной порезки проката. 5 ил.^Изобретение относится к машиностроению, в частности к конструкции систем управления оборудованием летучих ножниц, производящих порезку проката на ходу на заданные мерные длины и снабженных механизмом выравнивания скоростей (МВС).Известно устройство, содержащее установленный между валом приводного двигателя и валом барабанов ножниц механизм выравнивания скоростей, связанныеЬ ва-лом двигателя и с валом ножниц соответст- 'венно датчики скорости двигателя и ножниц, связанный с прокатом посредством мерительного ролика датчик скорости проката, блоки задания средней и энергетической скорости привода, задатчик длины, блок определения.энергетической скорости привода, регуляторы скорости и тока, звено компенсации ЭДС двигателя, усилитель мощности и датчик тока.ГОо ^ ю>&hO
о,г 0,4 о, в
| Устройство управления летучими ножницами | 1984 |
|
SU1234072A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1988 |
|
SU1574383A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| \/ | |||
