t
(21)4451368/25-08
(22)28.06.88
(46) 30.06,90. Бкш. ff 24 (72) В.Л.Хмельковский, Ю.Н.Запольский и B.C.Несоленый
(53)621-229.7 (088.8)
(56)Авторское свидетельство СССР № 957366, кл. Н 02 К 41/03, 1983.
(54)ПРИВОД ШАГОВОГО ПЕРЕМЕЩЕНИЯ
(57)Изобретение относится к машиностроению и может быть использовано
в конструкциях промышленных роботов, используемых в составе роботизированных технологических комплексов для многопозиционной механической обработки, а также в гибких производственных системах. Целью изобретения является повышение точности позиционирования за счет обеспечения беззазорной фиксации и расширение технологических возможностей за счет обеспечения
шагового перемещения в двух направлениях. Для перемещения платформа 3, несущей манипулятор, на один шаг перемещается в одно из крайних положений (в зависимости от напряжения перемещения манипулятора) каретка 14 посредством привода 16, при этом фиксатор 17 или 18 (в зависимости от направления перемещения) проскакивает упор 5. Затем выдвигается фиксатор 20, установленный на платформе 3, и реверсируется привод 16. При этом фиксатор 17 или 18 упираясь в упор 5, приводит в движение платформу 3 и перемещает ее пока фиксатор 20 не коснется одного из упоров 5, обеспечивая тем самым выбор зазоров. Кроме того, для обеспечения точности позиционирования путем однозначной опоры на три колеса 7 происходит прижатие платформы 3 к направляющим захватов 30. 4 ил.
(Л
с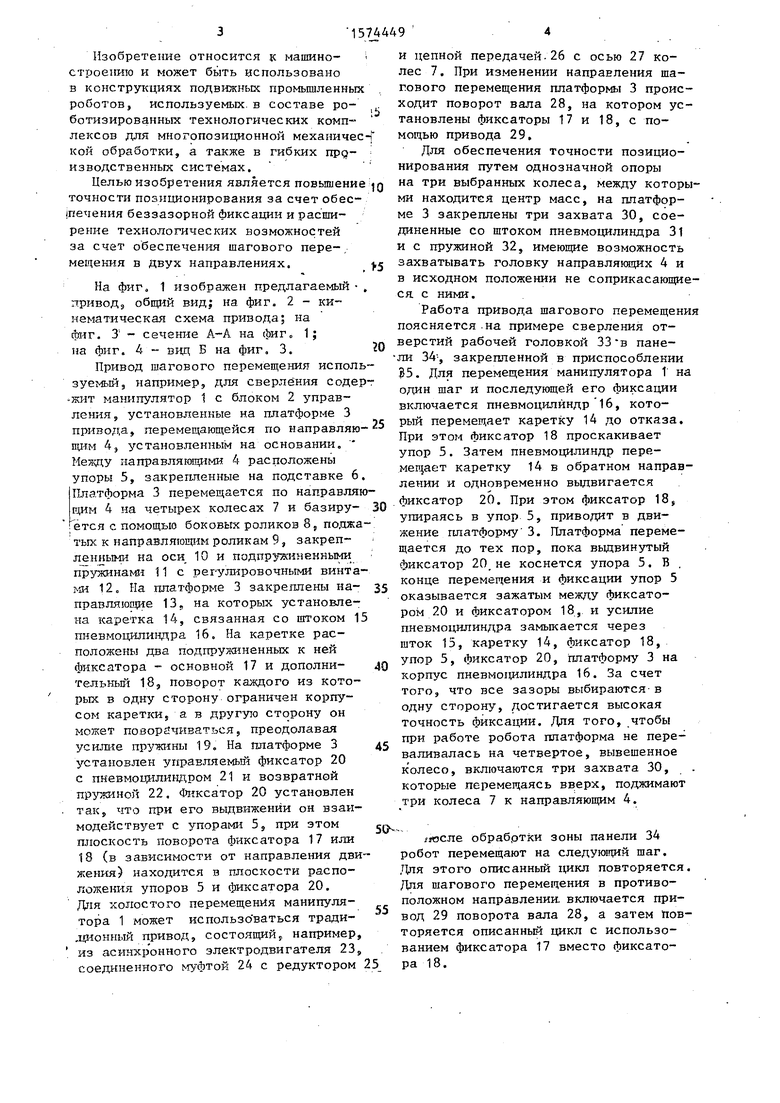
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система | 1988 |
|
SU1567359A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Автооператор | 1982 |
|
SU1033288A1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
| СВЕРЛИЛЬНЫЙ СТАНОК | 1993 |
|
RU2120833C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ГИБКОГО МАНИПУЛЯТОРА | 2019 |
|
RU2721769C1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях подвижных промышленных роботов, используемых в составе роботозированных технологических комплексов для многопозиционной механической обработки, а также в гибких производственных системах. Целью изобретения является повышение точности позиционирования за счет обеспечения беззазорной фиксации и расширение технологических возможностей за счет обеспечения шагового перемещения в двух направлениях. Для перемещения платформы 3, несущей манипулятор, на один шаг перемещается в одно из крайних положений (в зависимости от напряжения перемещения манипулятора) каретка 14 посредством привода 16, при этом фиксатор 17 или 18 /в зависимости от направления перемещения/ проскакивает упор 5. Затем выдвигается фиксатор 20, установленный на платформе 3 и реверсируется привод 16. При этом фиксатор 17 или 18, упираясь в упор 5, приводит в движение платформу 3 и перемещает ее пока фиксатор 20 не коснется одного из упоров 5, обеспечивая тем самым выбор зазоров. Кроме того, для обеспечения точности позиционирования, путем однозначной опоры на три колеса 7, происходит прижатие платформы 3 к направляющим посредством захватов 30. 4 ил.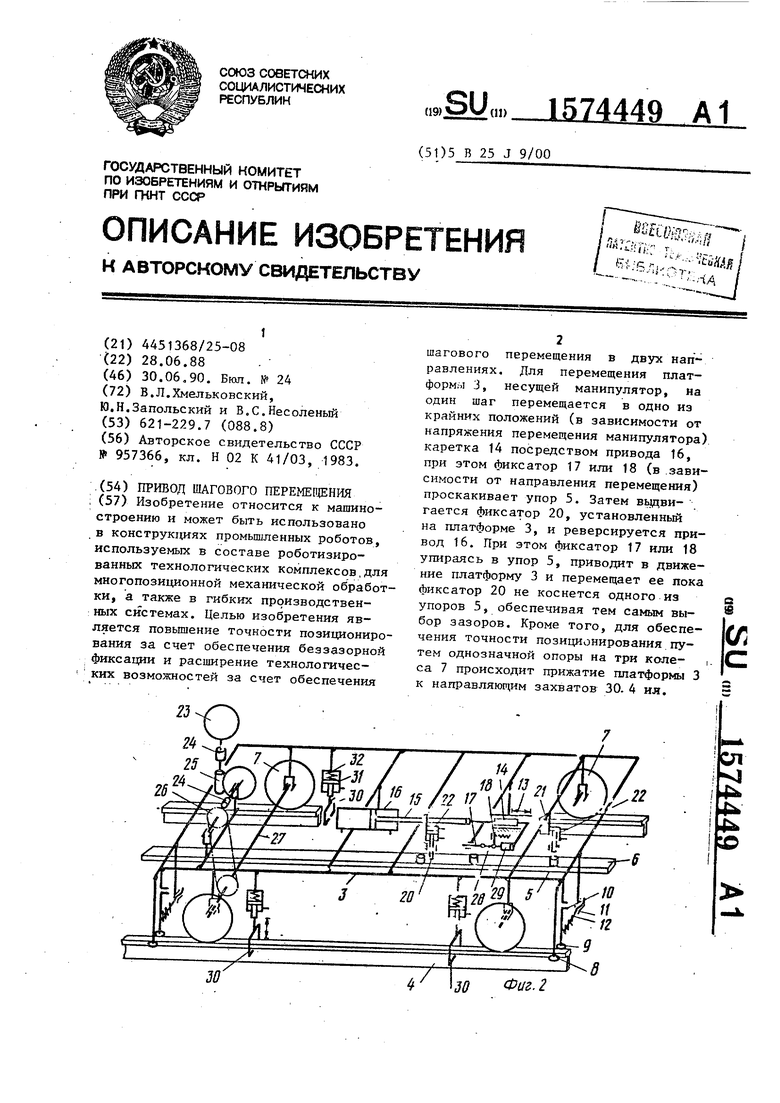
23
30
/
Ь JO фм-2
Изобретение относится к машино- строению и может быть использовано в констру1сциях подвижных промышленных роботов, используемых в составе роботизированных технологических комп- лексов для многрпозиционной механичес кой обработки, а также в гибких про.- изводственных системах.
Целью изобретения является повьшение точности позиционирования за счет обеспечения беззазорной фиксации и расширение технологических возможностей за счет обеспечения шагового перемещения в двух направлениях.
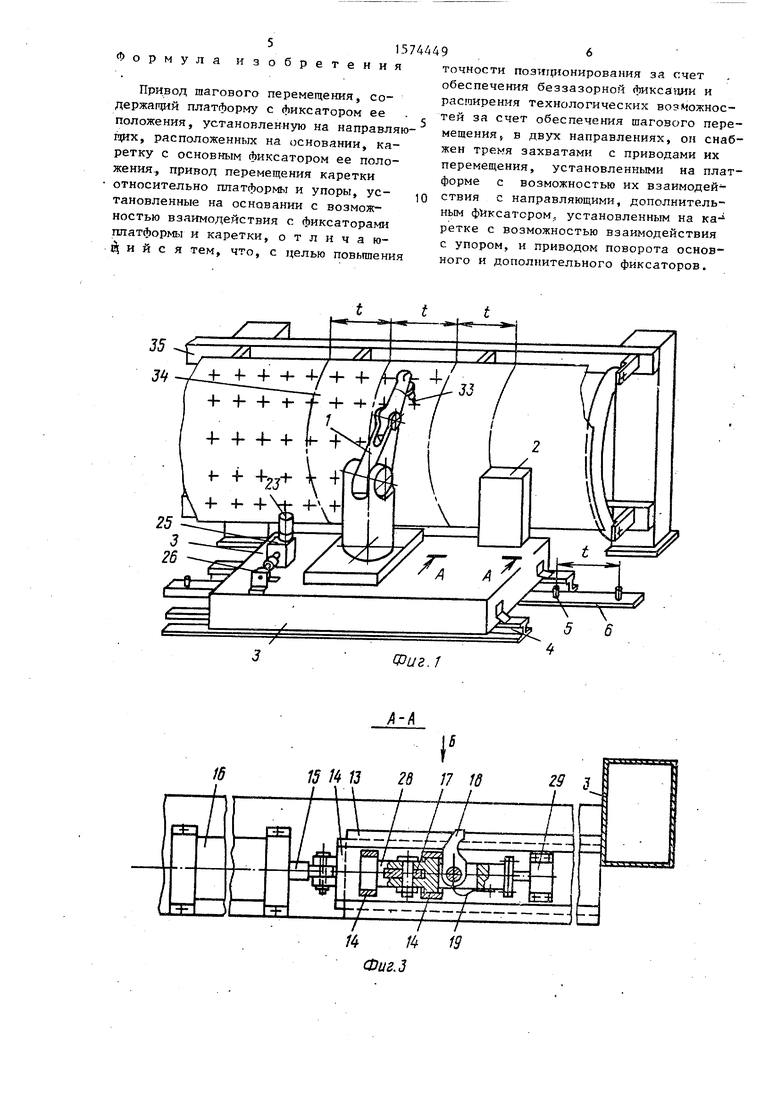
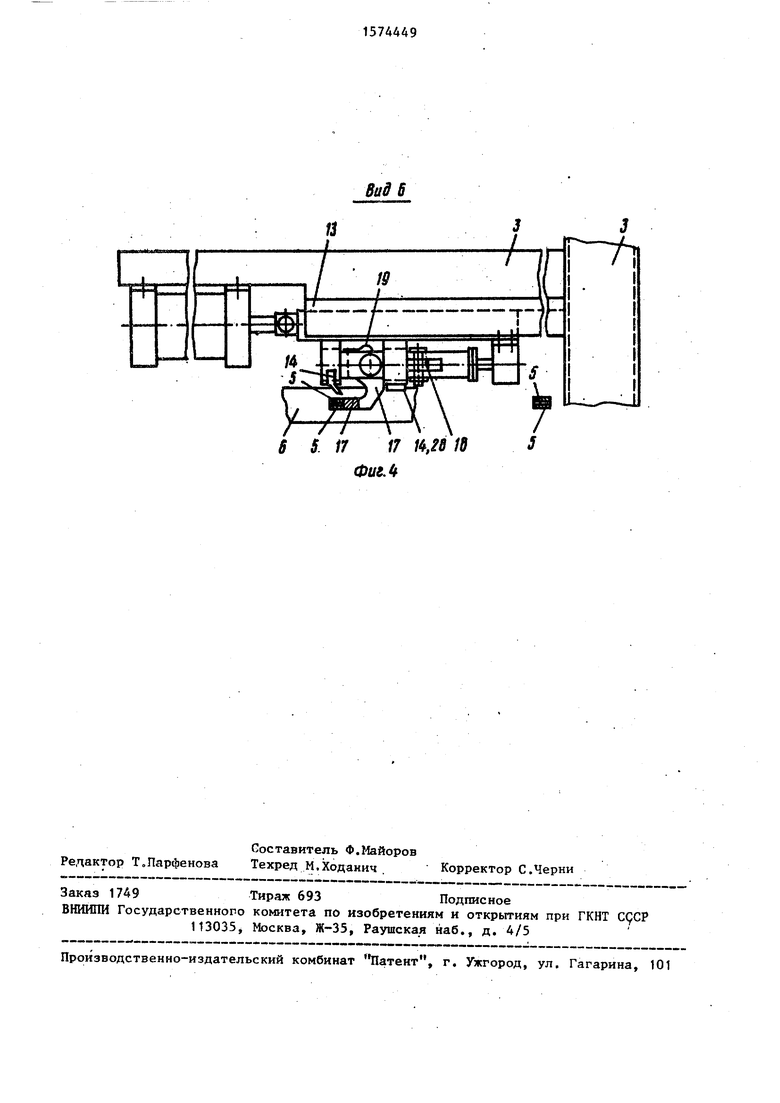
На фиг. 1 изображен предлагаемый . приводэ общий вид; на фиг. 2 - кинематическая схема привода; на фиг. 3 - сечение А-А на фиг„ 1; на фиг. 4 - вид Б на фиг. 3.
Привод шагового перемещения используемый з например, для сверления содер
-жит манипулятор 1 с блоком 2 управления s установленные на платформе 3 привода, перемеЕрющейся по направляющим 4, установленным на основании. Между направляющими 4 расположены упоры 5, закрепленные на подставке 6. Платформа 3 перемещается по направляющим 4 на четырех колесах 7 и базиру-
с помощью боковых роликов 8f поджатых к направляющим роликам 9, закрепленными на оси 10 и подпружиненными пружинами 11 с регулировочными винтами 12, На гшатформе 3 закреплены на- правляющие 13„ на которых установлена каретка 14, связанная со штоком 15 пневмоцилиндра 16. На каретке расположены два подпружиненных к ней фиксатора - основной 17 и дополни- тельный 18, поворот каждого из которых в одну сторону ограничен корпусом каретки, а в другую сторону он может поворачиваться, преодолевая усилие пружины 19. На платформе 3 установлен управляемый фиксатор 20 с пневмоцилиндром 21 и возвратной пружиной 22. Фиксатор 20 установлен так. что при его выдвижении он взаимодействует с упорами 5S при этом
плоскость поворота фиксатора 17 или 18 (в зависимости от направления движения) находится в плоскости расположения упоров 5 и фиксатора 20. Для холостого перемещения манипулятора 1 может использоваться тради- лионный привод, состоящий,, например, из асинхр онного электродвигателя 239 соединенного муфтой 24 с редуктором 25
S
5
д 5
0
5 0
5 0 5
l
5
и цепной передачей.26 с осью 27 колес 7. При изменении направления шагового перемещения платформы 3 происходит поворот вала 28, на котором установлены фиксаторы 17 и 18, с помощью привода 29.
Для обеспечения точности позиционирования путем однозначной опоры на три выбранных колеса, между которыми находится центр масс, на платформе 3 закреплены три захвата 30, соединенные со штоком пневмоцилиндра 31 и с пружиной 32, имеющие возможность захватывать головку направляющих 4 и в исходном положении не соприкасающиеся с ними.
Работа привода шагового перемещения поясняется на примере сверления отверстий рабочей головкой 33 в пане- ли 34, закрепленной в приспособлении В5. Для перемещения манипулятора 1 на один шаг и последующей его фиксации включается пневмоцилиндр 16, который перемещает каретку 14 до отказа. При этом фиксатор 18 проскакивает упор 5. Затем пневмоцилиндр перемещает каретку 14 в обратном направлении и одновременно выдвигается фиксатор 20. При этом фиксатор 18, упираясь в упор 5, приводит в движение платформу 3. Платформа перемещается до тех пор, пока выдвинутый фиксатор 20. не коснется упора 5. В . конце перемещения и фиксации упор 5 оказывается зажатым между фиксатором 20 и фиксатором 18, и усилие пневмоцилиндра замыкается через шток 15, каретку 14, фиксатор 18, упор 5, фиксатор 20, платформу 3 на корпус пневмоцилиндра 16. За счет того, что все зазоры выбираются в одну сторону, достигается высокая точность фиксации. Для того, чтобы при работе робота платформа не переваливалась на четвертое, вывешенное колесо, включаются три захвата 30, которые перемещаясь вверх, поджимают три колеса 7 к направляющим 4.
«осле обрабртки зоны панели 34 робот перемещают на следующий шаг. Для этого описанный цикл повторяется. Для шагового перемещения в противоположном направлении, включается привод 29 поворота вала 28, а затем повторяется описанный цикл с использованием фиксатора 17 вместо фиксатора 18.
1574
Формула изобретени
Привод шагового перемещения, содержащий платформу с фиксатором ее положения, установленную на направляющих, расположенных на основании, каретку с основным фиксатором ее положения, привод перемещения каретки относительно платформы и упоры, установленные на основании с возможностью взаимодействия с фиксаторами платформы и каретки, отличаю- $ и и с я тем, что, с целью повышения
1
15
15 К 13 2д ./
1574449
точности позиционирования за счет обеспечения беззазорной фиксации и расгаирения технологических возможностей за счет обеспечения шагового перемещения s в двух направлениях, он снабжен тремя захватами с приводами их перемещения, установленными на платформе с возможностью их взаимодействия с направляющими, дополнительным фиксатором, установленным на ка- ретке с возможностью взаимодействия с упором, и приводом поворота основного и дополнительного фиксаторов.
&L
33
f
s 6
4
Фиг. Г
Фиг.З
13
/-
Вид 5
/
j r-h
17 К,2Ъ 18 Фиг. 4
