--1 Ч
00
Изобретение относится к машиностроению, а именно к промышленным роботам, для автоматизации различного промьгашенногс оборудования.
Цель изобретения - расширение технологических возможностей за счет бесступенчатого позиционирования механической руки, увеличения ресурса работы и надежности робота.
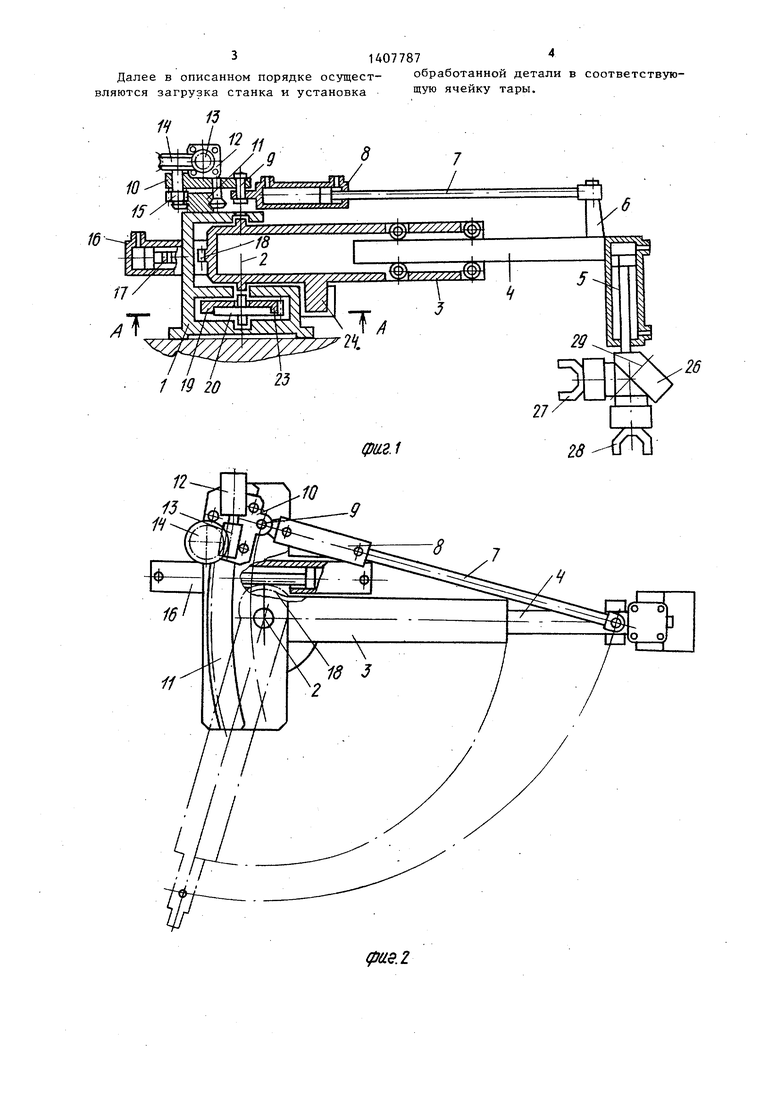
На фиг, 1 показана компоновка робота, разрез; на фиг. 2 - робот, вид сверху} на фиг.-З - разрез А-А на фиг. 1 на фиг. 4 - рабочая зона робота,
Робот Содержит корпус 1, имеющий ось 2, вокруг которой вращается звено 3 - поворотная часть руки, по направляющим которой перемещается выдвигающаяся часть руки.А (ползун). На конце ползуна жестко установлены цилиндр 5 линейного перемещения и кронштейн 6, шарнирно связанный со штоком 7 пневмоцилиндра 8, который, в свою очередь, шарнирно связан чере 1 ось 9 с кареткой 10, перемещающейся по направляющей рейке 11, жестко уст новленной на корпусе 1,
Каретка 10 приводится в движение по рейке 11 шаговым приводом (двига- телем) 12, который вращает червяк 13 червячное колесо 14, на оси которого (же.стко закреплена шестерня 15, входящая в зацепление с рейкой 11.
На корпусе 1 закреплен сдвоенный пневмоцилиндр 16 поворота, имеющий два поршня, связанные между собой рейкой 17, входящей в зацепление с Ьубчатой сектором 18 на звене 3.
В нижней части .корпуса 1 установ- Иен шаговый привод поворота упора, состоящий из упора 19, установленно- то на водиле 20. Упор 19 имеет при- ЕВОД от двигателя 21, который через цилиндрическую передачу вращает чер- |вяк 22, зацепляющийся с червячным Колесом 23, жестко скрепленным с одилом 20. На звене 3 жестко устано ен упор 24, взаимодействующий с по- ,(вижным упором 19 и неподвижным упо- jpoM 25, жестко установленным на кор- iryce 1.
На пневмоцилиндре 5 смонтирован схват 26 с двумя зажимными устройств Йи 27 и 28, имеющими возможность вра ения вокруг оси 29, расположенной Ьод углом 45 к оси пневмоцилиндра 5 В рабочей зоне робота расположена Кассета 30 с заготовками 31, находя- ||чимися в ячейках кассеты.
,
j
5
0 з
„
0
5
0
5
Робот работает следующим образом.
Сжатый воздух подается в правую полость пневмоцилиндра 8. Шток 7 вместе с кронштейном 6, пневмоцилинд- ром 5 и схватом перемещаются влево, а зажим 27, в котором находится заготовка, подводится к патрону станка. Одновременно подаются сигналы на двигатели 12 и 21, которые перемещают в заданное положение каретку 10 и упор 19, определяемое ячейкой в .кассете 30, в которую должен попасть схват при его повороте к кассете. Далее подаются сигналы на зажим заготовки патроном станка и разведение губок зажимного устройства 27. После подачи .сжатого воздуха в левую полость пневмоцилиндра 8 шток 7, ползун 4 и схват отводятся от патрона станка. Далее сжатый воздух подается в левую полость пневмоцилиндра 16, при этом поршень и рейка 17 перемещаются вправо и вращают сектор 18 на звене 3. В результате схват 26 поворачивается к кассете 30. Радиальное позиционирование каретки 10 и угловое позиционирование упора 19 обеспечивают размещение схвата 26 над за- данной ячейкой кассеты 30. После этого зажимы поворачиваются вокруг оси 29 и зажим 27 устанавливается вертикально над ячейкой кассеты. Это движение вызьгаано тем, что зажим 27 настроен на размер заготовки, а зажим 28 на размер захватываемой поверхности детали, обработанной в станке. Далее сжатый воздух подается в верхнюю полость пневмоцилиндра 5, схват 26 опускается и зажим 27 захватывает заготовку, после чего схват 26 поднимается и вынимает заготовку из ячейки ка ссеты 30.
Когда закончена обработка детали на станке, сжатый воздух подается в правую полость пневмоцилиндра 16, при этом рейка 17 перемещается влево и схват 26 поворачивается к патрону станка, после чего зажим 28 устанавливается соосно со шпинделем станка.
Далее давление подается в правую полость пневмоцилиндра 8, схват перемещается влево, зажим 28 подходит к обработанной на станке детали и захватывает ее. Затем подается давление в левую полость пневмоцилиндра 8 и схват перемещается вправо, после чего зажимы поворачиваются вокруг оси оси 29 на 180.
12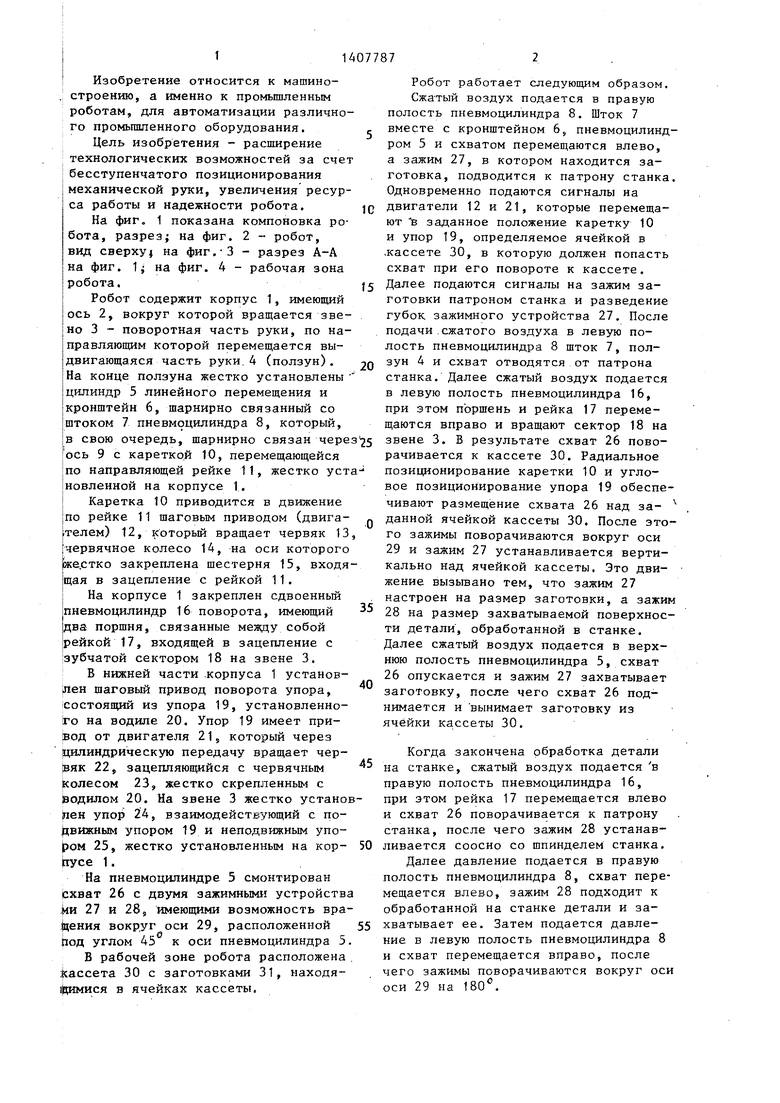
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для накопления и поштучной выдачи заготовок | 1983 |
|
SU1184590A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват промышленного робота | 1987 |
|
SU1516349A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
фа$.2
9t
flfffteflfftMOtf ее wArtW Mlч ,
Xaf foHfiiretttf Звю«тм ги tao/nfen
«nfetm
«лпиюоммкп /я
jmteafau44
| Белянин П.Н | |||
| Промышленные роботы и их применение | |||
| - М.: Машиностроение, 1983, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
