Изобретение относится к области машиностроения, в частности к промышленным роботам дня загрузки деталями кассет и поддонов, установленных на конвейере. Известен промышленный робот, содержаший манипулятор с механической рукой, установлен ный на столе, вьшолненном в виде двух, размещенных одна на другой, платформ с приводами их перемещения 1. Недостатком известного робота является невозможность вьшолнения таких технологи- ческих операций, как съем деталей с нетрерьюно даижущегося конвейера и уклгц ка их в кас сету. Кроме того, робот имеет сложную конструкцию и увеличенные габариты Цель изобретения - устранение указанных недостатков. Цель достигается тем, что робот снабжен золотником и механизмом шагового перемеше1шя, содержащим корпус с направляющими, каретку, смонтированное в корпусе с возможностью поворота водило, в котором установлены подпружиненные пальцы, ударное устройство с соосными пальцам подпружиненными сердечниками и фиксатор, на платформах попарно закреплены штоки силовых цилиндров, корпуса которых жестко связаны между собой и с корпусом золотника, шток последнего связан с кареткой механизма шагового перемещения, верхняя.платформа неподвижно закреплена на корпусах силовых цилиндров нижней платформы, манипулятор - на корпусах силовых цилиндров верхней платформы, кроме того на каретке вьшолнены пазы, шаг которых соответствует шагу расположения пальцев. На фиг. 1 изображен промышленньш робот, общий вид; на фиг. 2 - сечение А-А на фиг. I; на фиг. 3 - схемауправляющего золотника; на фиг. 4 - показан механизм шагового перемещения со снятой крышЛой; на фиг. 5 - сучение Б-Б на фиг. 4; на фиг. 6 - вид В на фиг. 4; на фиг. 7 - схема работы манипулятора при загрузке технологической кассеты деталями. Промышленньш робот имеет манипулятор 1. с механической рукой 2, обеспечивающей в представленном варианте четыре степени свободы (обозначены стрелкой) и оснаще пюй схва том 3 для удержания укладьюаемой детали 4, укреплен своим основанием на столе 5.
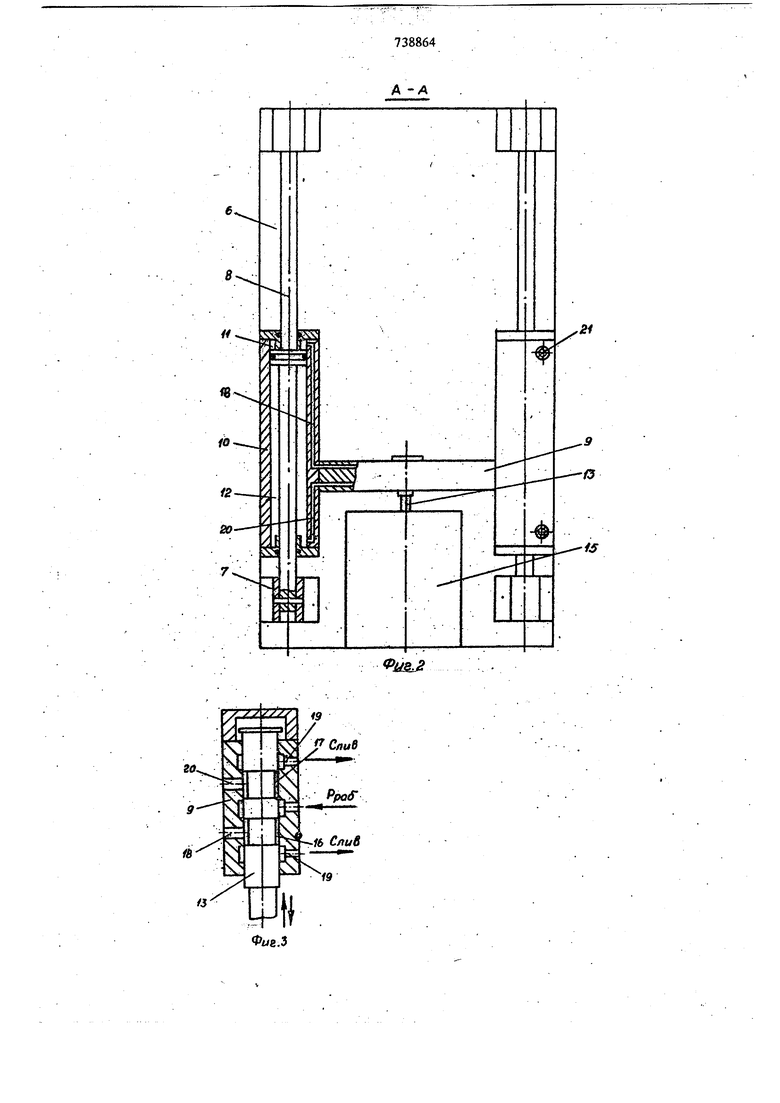
Стол состоит из двух платформ, каждая из которых представляет собой (фиг. 2) основание б с укрепленными на нем в кронштейнах 7 двумя параллельными штоками 8 силовых цилиндров например гидродилиндров, по kOTopHM могут перемещаться жестко связанные между собой и с корпусом золотника 9 два корпуса 10 этих силовых цилиндров. На фиг. 2 корпус 10 изображен в крайнем нижнем положении.
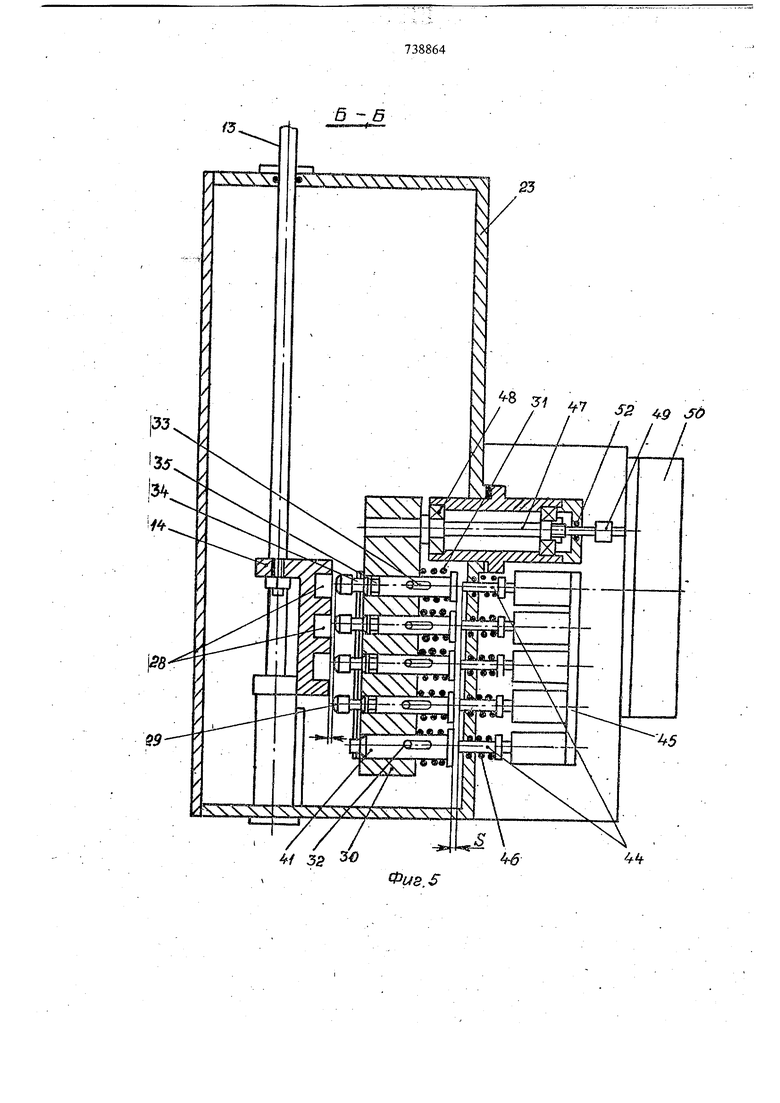
Подачей рабочего движения в полости 11 и
12гидроцилиндра зшравляет золотник 9, шток
13которого связан с кареткой 14 (фиг. 4 и 5) механизма 15 шагового перемещение, неподвижно укрепленного на основании 6 платформы.
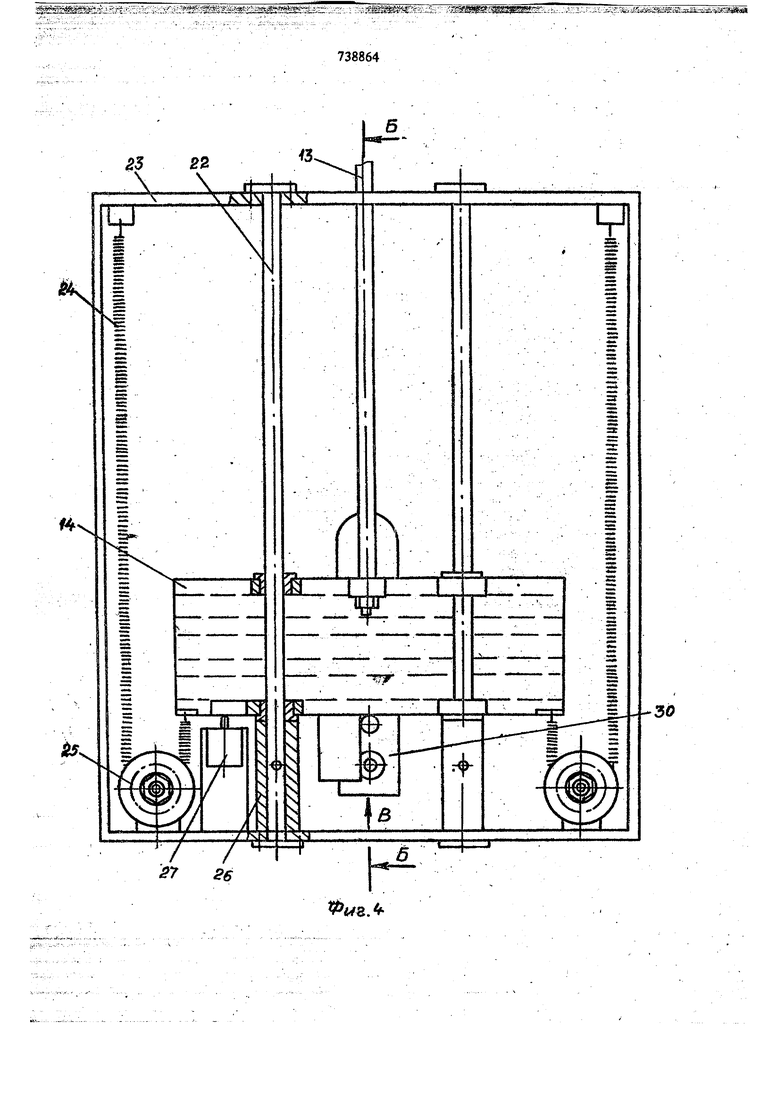
Рабочее давление жидкости гидроцилиндра Р g (фиг. 3) от насосной станции (не показана) подводится к золотнику 9 и в зависимости от положения штока 13 попадает либо в полость 16, либо в полость 17, либо обе полости будут закрыты для рабочего давления - такое положение является исходным. Из полости 16 рабочее 25 давление по каналам 18 обоих корпусов 10 гид роцилиндров передается в полость 11, полости 1 обоих гидроцилиндров будут через верхнее отверстие 19 соединены с магистралью слива. Обе платформы стола 5 связаны между со.бой Верхняя платформа своим основанием 6 (фиг.1) крепится к корпусам 10 (фиг. 2) гидроцилиндроа нижней платформы с помощью болтов 21 и имеет возможность перемещения в горизонтал ной плоскости на величину хода корпусов 10. Верхняя платформа орие1ггарована относительно нижней таким образом, что корпуса 10 гидроцшшндров имеют возможность перемещения в горизонтальной плоскости в направлении, перпендикулярном движению корпусов 10 (фиг. 1) нижней, платформы. Полотно стола 5 (фиг. 1), закрепленное на корпусе 10 цилиндрбв верхней платформы с помощью болтов 21, имеет таким образом две степе1Ш свободы в горизонтальной плоскости. Одновременно две допол1штельных-степени свободы цриобретает и связанный со столом 5 манипулятор I. Перемещением стола 5 по каждой координате в соответствии с необходимой программой управляют механизмы 15 шагового перемещения. Конструкция зтого механизма представлена на фиг. 4, 5 и 6. Элементом, который перемещается по заданному закону, является каретка 14, с которой связан шток 13 золотника 9. Каретка 14 Перемещается по направляющим 22, неподвижно закреплен1п 1м в корпусе 23 механизма шагового перемещения 15. В исходном положении
изображенном на фиг. 4, каретка 14 под действием пружин 24, охватывающих ролики 25, прижата к упорам 26 и воздействует на конечный выключатель 27, сигнализирующий об исходном положении каретки 14. В каретке 14 в направлении, перпендикулярном направляющим 22, выполнены пазы 28 с шагом, соответству-. ющим шагу между рядами отверстий в заполняемой кассете и шагу расположения пальцев
29. Последние расположены напротив пазов 28 каретки 14 и свободно сидят в расточках водила 30. В исходном положении пальць 29 пружинами 31 поджаты к штифтам 32, запрессовашшм в водило 30 и проходящим через пазы 33 пальцев 29. В зтом положении левые торцы пальцев 29 (фиг. 5) образуют зазор порядка 1 мм с обращенной к ним плоскостью каретки 14. На каждом пальце 29 имеются две проточки 34 и 35, в которые в зависимости от их положения западает рьиаг 36 защелки 37 (фиг. 6). Зашелка имеет возможность поворота вокруг оси 38, запрессованной в водило 30. Плоская пружина 39, одним концом соединяемая е водилом 30, другим концом упирается в защелку 37, поджимая ее к пальцам 29. В исходном положении рычаг 36 защелки 37 входит в проточки 34 пальцев 29 и в проточку 40 пальца 41 сброса на нуль. Палец 41 также сидит в проточке водила 30, имеет диаметр больншй, чем диаметры пальцев 29, и за счет пружины 42 поджат к штифту 32, запрессованному в водило 30 и подхо дящему через паз 43 пальца 41. В исходном положении .напротив правого торца каждого пальца 29 и йальца 41 расположены оси 44 ударного механизма 45. Электромагниты крепятся к корпусу 23 механизма шагового перемещения 15. При отключенных электромагнитах их сердечга1ки под действием пружин 46 отжаты вправо и между их торцами и торцами пальцев 29 и 41 имеется зазор S порядка 1 мм. Водило .30 с размещенными в нем пальцами 29 и 41 и защелкой 37 имеет возможность кругового вращения BOKPJT оси 47, запрессованной в водило 30 и связанной с корпусом 23 через подшипники 48. Ось 47 через муфту 49 сцеплена с приводом 50. Кроме изображенного на чертежах, в состав промышленного обота входят пульт управления, программное устройство и блок питания. Промьшшенный робот работает следуюпщм образом. При работе его по укладке деталей в технологические кассеты деталь 4 (фиг. 7) подается в Зону перегрузки непрерьшно движущимся конвейером 51. Рука 2 по сигналу датчиков (ца чертеже не показаны) с помощью схвата 3 берет деталь 4 с конвейера 51 в определенной точке пространства выполняет с не все необходимые манипуляции (подъем или опускание детали, переворот или разворот ее на определенный угол и т.д.), переносит ее, поворачиваясь вокруг вертикальной оси, в направлении, указанном стрелкой, в тояку пересечения нижнего горизонтального ряда с правым вертикальным рядом отверстий 52 технологической кассеты 53, установленной на конвейере 54. Очутившись над отверстием с указанными координатами, схват освобождает деталь, которая попадает в отверстие кассеты 53. Рука возвращается в исходное положение для приема новой детали 4. . . , В дальнейшем манипулятор 1 продолжает бьшолнять перечисленные операции, а приведение схвата 3 в точку с заданными координатами над соответствующим отверстием 52 технологической кассеты 53 осуществляет стол 5. Если надо положить деталь во второе от низу отверстие правого ряда кассеты 53, то манипулятор 1, ,как обычно, зажимает в охвате 3 деталь 4 и начинает движение для разворота руки 2, т.е. перемещая деталь 4 в точку с прежними координатами: нижний правый ряд Одновременно с зажимом детали 4 дается сигнал запуска стола, по этому сигналу срабатывает электромагнит ударного мехашзма 45, например, верхней платформы стола 5, ближайши к оси 47 вращения водила 30. При этом его сердечник ударяет по торцу находящегося напр тйв него пальца 29. Палец 29, приходя в движ ние, имеющейся на нем конической частью (фа ) отжимает рычаг 36 защелки 37 и движется до тех пор, пока это ему позволяет паз 33. Одновременно рычаг 36 защелки 37 западает в проточку 35, фиксируя выдвинутое положение пальца после прекращения удара, т.е. после отключения электромагнита А сердечник пружиной 46 возвращается в исходное, крайнее правое положение. Одновременно с ударом вкл чается Привод 50, поворачивающий водаяо 30 вокруг оси 47. Так как палец 29 вошел в зацепление с кареткмс 14, то последняя тоже перемещается по направляющим 22. В предлагаемой конструкции расстояние между осевой линией оси вращения 38 и осью ближайшего к ней пальца 29 равно половине щага между горизонтальными рядами отверсти 52 технологической кассеты 53. Поэтому при повороте водала 30 на 180° каретка 14 переместится на максимальную величину, равную нигу между отверстиями кассеты 53. Каретка 14, перемещаясь, двигает шток 13 золотника 9, который, перемещаясь в данном случае вверх (фиг. 3), открывает для рабочего давления полость 16. Из этой полости рабочая жидкость передается по каналам 18 в полости 11 (фиг. 2) гндроцнлнндров. Одновременно полости 12 сообщаются через каналы 20 О магистралью ашва 19. Корпуса 10 йод действием давления движутся вверх, перемещая манипулятор 1 и корпус золотника 9 и стремясь занять положение, когда щток 13 перекроет доступ рабочему давлению жидкости в полости 16 и 17. Манипулятор 1 движется, ледя за положением иггока 13. После того, как мага1пулятор 1 переместится на величину шага, деталь 4 оказывается над вторым огеерстием правого ряда 53.: В гаком положении привод 50 осуи ествляет остановкуводила 30, следовательно, всего манипулятора на период времени, необходимый для раскрьггия схвата 3. После вьвдержки привод 50 снова вращает водило 30 вокруг оси 47, завершая полный оборот. 1&ретка 14 под действием пружин 24 с заданной скоростью возвращается к упорам 26, достигнув которых замьжает конечный выключатель 27, что приводит к останЬвке привода. Одновременно срабатывает ударный меха1шзм 45 (электромагнит), расположенный против пальца 41 сброса на нуль. Его ось 44, ударяя по торцу пальца 41, приводит палец в движение. Ось 44 своей конической частью (фиг. 6) отжимает рычаг 36 защелки 37 и так как ее диаметр больше диаметра пальцев 29, вьщвинутьш палец 29, освобождаясь от фиксации, под действием пружины 31 возвращается вправо в исходное положение. Каретка 14 снова расцеплена с водилом 30. Палец 41 действием пружины 42 возвращается в исходное положег1ше после отключе1шя воздействующего на него электромагнита. Ма1гапулятор 1, следя за перемещением каретки 14 механизма 15 шагового перемещения, также возвращается в исходное положение (назад), одновременно поворачивая руку 2 для приема новой детали 4 с конвейера 51. После приема новой детали 4, которую робот должен положить в следующее отверстие правого ряда кассеты, сигнал запуска включает электромапшт, приводящий к сцеплению кареткой пальца 29, расположенного на заанном расстояшш от предыдущего пальца и цикл повторяется сшова. Подобным образом работает робот при заполнении правого ряда OTBepcTiui технологической кассеты 53. После заполнения правого ряда в работу включается нижняя платформа стола 5, мат1пулятор на щаг для заполнения нижнего отверстия среднего ряда. Для заполнения второго отверсйи среднего ряда в работу включаются обе платформы стола 5, выводя схват 3 с деталью 4 в точку с заданными координатами. В процессе заполнения кассеты манипулятор 1 отрабатьгоает пос:тЬянн6 одну программу снимает деталь 4 с ко1тейера 51, манипулирует с ней и, поворачивая руку все время на один угол, как бы стрегуштся вьшести схват в точку с координатой - пересечение 1шжнего ряда отверстий с правым рядом отверстий тех нологической кассеты 53. После заполнения кассета перемещается ко1юейером для дальнейшей доработки деталей 4, на ее место поступает новая кассета. Формула изобретения ЬПромьшшенный ротор.содержащий манипулятор с механической рукой, установленный на столе, выполненном в виде двух, размещен ных одна на другой, платформ с приводами их перемещения, например, .силовыми цилиндрами, отличающийся тем, что, с целью упрощения конструкции, уменьшения габаритов ч расширения функциональных возможностей, он снабжен золотником и механиз мом шагового перемещения, содержащим корп С направляющими, каретку, смонтированное в корпусе с возможностью поворота водило, в котором установлены подпружиненные пальцьь ударное устройство с соосными пальцам подпружиненными осями и фиксатор, на платформе попарно закреплены штоки силовых цилиндров, корпуса которых жестко связаны междусобой и с корпусом золотника, а шток последнего связан с кареткой механизма шагового перемещешш. 2.Робот по п. 1, о т л и ч а ю щ .и йс я тем, что верхняя платформа неподвижно закреплена на корпусах силовых цилиндров нижней платформы, а маюшулятор - на корпусах силовых цилиндров верхней платформы. 3.Робот по п. 1, о т л и ч а ю щ и йс я тем, гто на каретке механизма шагового перемещения вьшолнены пазы, шаг которых соответствует шагу расположения пальцев. Источники информации, принятые во внимание при экспертизе 1. Развитие робототехники за рубежом. Обзор С-1, НИИМАШ, М„ 1976, с, 19-22.го.
У
738864 4./ 55 3 Фil8.S 9