1
(21)4385951/06
(22)01,03.88
(46) 23.0.91. Бюл0 (Р 15 71) Челябинский политехнический институт им- Ленинского комсомола (72) В.К.Долбзнков (33) 62 3-55(088 8) (56)Рыбальченхо А.Г., Автоматическое регулирование -урбонаццупс- дизелей0- Киев, Донецк: В ища jiKora, 1984. с. Ј4-46.
(54)- СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С НАДДУВОМ (57) Изобретение позволяет стабилизировать динамические характеристики системы управления путем введения
нелинейных связей по перемене; изо топливодозирующего органа двигателя, частот е вращения зала и давлению над дува0 Система содержит источник 1 задающего сигнала, измерители 2 и 11 рассогласования, корректирующие звенья 9 и 12, усилители 9, 10 датчики 7, 8, 16 перемещения топлнводозирую- щегс органа, частого вращения вала двигателя 6 и давления наддува, создаваемого турбокомпрессором 15. Введение нелинейных преобразователей 4 и 13 позволяет выполнить систему управления нечувствительной к изменению скоростных и нагрузочных режимов, 3 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения двигателя внутреннего сгорания | 1985 |
|
SU1271988A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1576705A2 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1986 |
|
SU1408095A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1983 |
|
SU1105673A1 |
| Датчик момента нагрузки двигателя внутреннего сгорания | 1989 |
|
SU1658001A1 |
| Регулятор частоты вращения двигателя внутреннего сгорания | 1988 |
|
SU1574877A1 |
| Способ регулирования числа оборотов двигателя внутреннего сгорания на испытательном стенде | 1973 |
|
SU486138A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для автоматического управления двигателем внутреннего сгорания на стенде | 1983 |
|
SU1139874A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
Изобретение относится к двигателе- строению, а именно к системам управления для двигателей внутреннего сгорания с оегулируемым наддувом
Цель изобретения - стабилизация динамических характеристик системы путем введения нелинейных связей по перемещению топливодозирующего органа двигателя, частоте вращзния вала двигателя и давлению наддува.
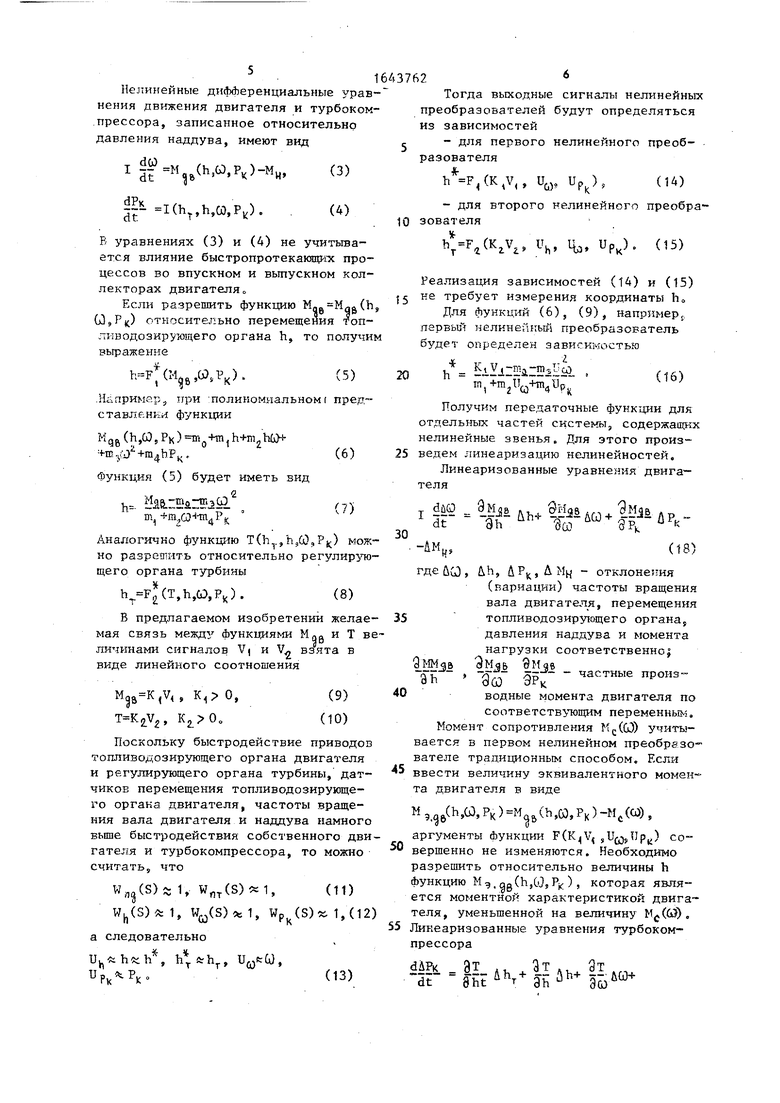
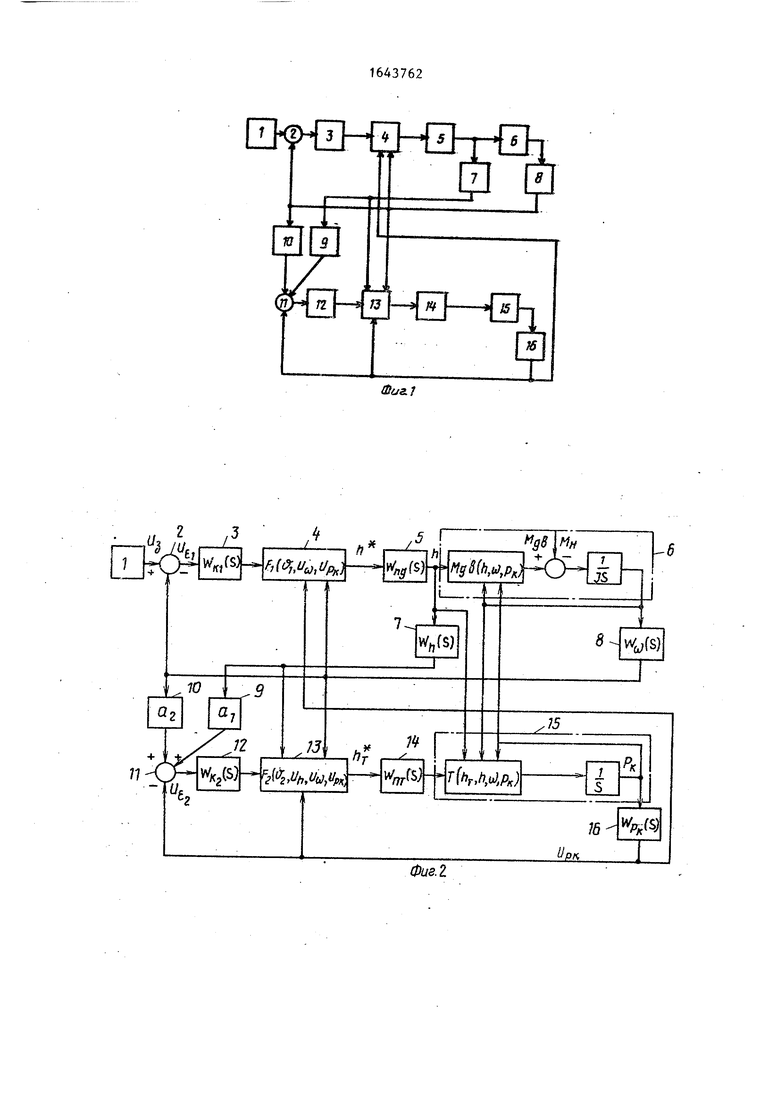
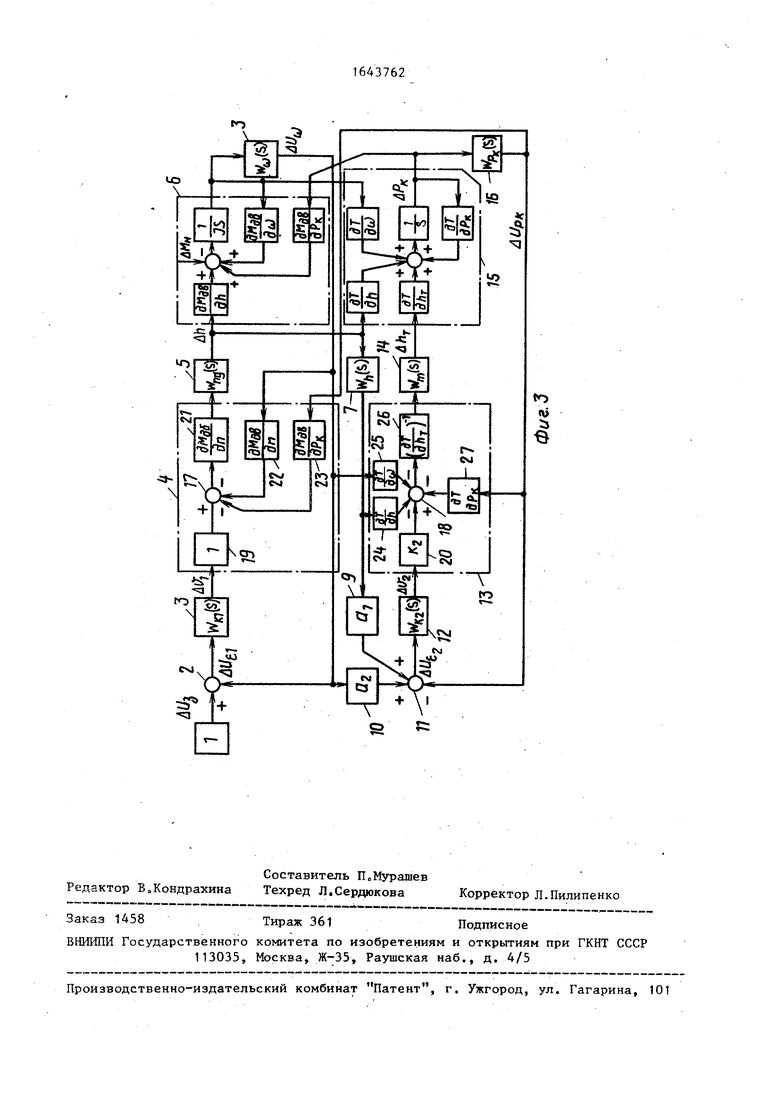
На фиг. 1 представлена функциональная схема системы управления; на фиг. 2 - структурная схема нелинейной модели системы управления; на фиг. 3 - структурная схема линеаризованной модели системы управления.
Система содержит источник 1 задающего сигнала, измеритель 2 рассогласования частоты вращения вала двигается с двумя входами, первое кор- ректирующее звено 3, первый нелинейный преобразователь 4 с тремя входами, привод 5 топливодозирующего органа двигателя, двигатель 6, датчик 7 перемещения топливодозирующего органа двигателя, датчик 8 частоты вращения вала двигателя, первый усилитель 9, второй усилитель 10, измеритель Т1 рассогласования давления наддува с тремя входами, второе корректирующее звено 12, второй нелинейный преобразователь 13 с четырьмя входами, привод 14 регулирующего органа турбины, турбокомпрессор 15, датчик 16 давления наддува,,
Каждый преобразователь содержит сумматоры 17 и 18, усилители 19 и 20, и дифференцирующие звенья 21-27.
Первый вход измерителя 2 рассогласования частоты вращения вала двигателя соединен с источником 1 задающего СИГГ.ЛЛа.; 2 В7КОД - СО ВХОДОМ
jsi,
BBZ&
J1
первого корректирующего звена 3, выход которого соединен с первым входом первого нелинейного преобразов а- теля 4, выход которого соединен со входом привода 5 топливодозирующего органа двигателя. Выход датчика 7 перемещения топливодозирующего органа двигателя соединен со входом первого усилителя 9 и вторым входом BTO ро го нелинейного преобразователя 13 „ Выход первого усилителя 9 соединен с
пер вым входом, а выход второго усилителя 10 со вторым входом измерителя 11 рассогласования давления над- J5 дува, выход которого соединен со входом второго корректирующего звена 12, выход которого подключен к первому входу второго нелинейного преобразователя 13, выход которого соединен СО20 входом привода 14 регулирующего органа турбины. Выход датчика 16 давления наддува соединен с третьим входом измерителя рассогласования 11 давления наддува, четвертым входом 25 второго нелинейного преобразователя 13 и вторым входом первого нелинейного преобразователя 4,
На фиг. 2 и 3 приняты следующие условные обозначения:3Q
и - входной задающий сигнал источника 1 ;
Ug - сигнал, пропорциональный ошибке по частоте вращения вала дви.35
40
гателя;
WK(S) - передаточная функция перво го корректирующего звена 3;
V, - выходной сигнал первого корректирующего звена 3j
h - выходной сигнал первого нелинейного преобразователя 4;
Wno(S) - передаточная функция привода 5 топливодозирующего органа двигателя.;
h - перемещение топливодозирующе- го органа двигателя;
У(8) - передаточная функция датчика 7 перемещения топливодозирующего органа двигателя;
М - момент нагрузки, приведенный топливодозирующего органа и частоты к валу двигателя 6}
I - момент инерции, приведенный к валу двигателя 6;
Гд (V ,%),Up.) - зависимость выходного сигнала первого нелинейного пре образователя от входного сигнала V. выходного сигнала датчика частоты вращения вала двигателя, выходного сигнала датчика давления наддува;
)иРц зависимость выходного сигнала второго нелинейног преобразователя от входного сигнала Vg,, выходного сигнала датчика переме щения топливодозирующего органа, выходного сигнала датчика частоты вращения вала двигателя, выходного сигнала датчика давления наддува.
Система управления работает следующим образомо
Программное значение давления наддува зависит от перемещения
вращения вала двигателя и определяет ся в виде прогр
Ч tVVb
(1)
WQ(S) - передаточная функция датчика 8 частоты вращения вала двигателя;
а - коэффициент передачи первого усилителя 9;
Q
а - коэффициент передачи второго усилителя 10;
и§г- сигнал, пропорциональный ошибке по давлению наддува;
WKZ(S) передаточная функция второго корректирующего звена 12;
hr - выходной сигнал второго нелинейного преобразователя 13;
WnT(S) - передаточная функция при50 5
Q
5
0
вода 14 регулирующего органа турбины;
перемещение регулирующего органа турбины;
РК - давление наддува во впускном коллекторе двигателя;
Wpfc(S) - передаточная Функция датчика 16 давления наддува;
выходной сигнал датчика 16 давления наддува;
M,,B(h,CO,PK) - зависимость крутящего момента двигателя от перемещения топливодозирующего органа, частоты вращения вала двигателя идавления наддува;
T(hT,h,0,P|.) - зависимость скоросх ти изменения давления наддува от перемещения регулирующего органа турбины, перемещения топливодозирующего органа и частоты вращения вала двигателя, давления наддува;
Гд (V ,%),Up.) - зависимость выходного сигнала первого нелинейного преобразователя от входного сигнала V.: выходного сигнала датчика частоты вращения вала двигателя, выходного сигнала датчика давления наддува;
)иРц зависимость выходного сигнала второго нелинейного преобразователя от входного сигнала Vg,, выходного сигнала датчика перемещения топливодозирующего органа, выходного сигнала датчика частоты вращения вала двигателя, выходного сигнала датчика давления наддува.
Система управления работает следующим образомо
топливодозирующего органа и частоты
Программное значение давления наддува зависит от перемещения
топливодозирующего органа
вращения вала двигателя и ся в виде прогр
Ч tVVb
а рассогласование по давлению наддува определяется в измерителе 11 по
формуле
ррогр Unr -Up.... (2)
U,
Јг иРк
31643762
Нелинейные дифференциальные урав- нения движения двигателя и турбокомпрессора, записанное относительно давления наддува, имеют вид
, р
do)
I gf M(h,6),PK)-MH, (3)
J& i(hT,h,CO,PK).
(4)
В уравнениях (З) и (4) не учитывается влияние быстропротекающих процессов во впускном и выпускном коллекторах двигателя„
Если разрешить функцию M,.(h, Q,PK) относительно перемещения топ- лнводозирухицего органа h, то получим выражение
(14,0).(5)
Нчпримор., при полиномиальном пред- ставлена функции
Кдв (h,CO, Рк ) m0+m, h-fm2h№- fffi%i}2+m4bPK.(6)
Функция (5) будет иметь вид
h tfat AZHafi.(7)
m, над+п Рц
Аналогично функцию T(h1,Ь/0,Р) можно разрешить относительно регулирующего органа турбины
(T,h,CD,PK).(8)
В предлагаемом изобретении желаемая связь между Функциями Мдй и Т величинами сигналов V| и V взята в виде линейного соотношения
,V4s К О, (9) T-KgVj, ).(10)
Поскольку быстродействие приводов топливомозирующего органа двигателя и регулирующего органа турбины, датчиков перемещения топливодозирующе- го органа двигателя, частоты вращения вала двигателя и наддува намного выше быстродействия собственного двигателя и турбокомпрессора, то можно считать, что
Wflg(S)s 1, WflT(S)«1, (11) Wh(S)1, N(5)1, WpR(S) 1,(12)
а следовательно
Uhfch«ih f
,0
, U0fcQt
(13)
Тогда выходные сигналы нелинейных преобразователей будут определяться из зависимостей
- для первого нелинейного преобразователя
,(K,V(, Ua, UpK)s (14)
- для второго нелинейного преобра- зователя
FJKiVz uh. Чо UpK). (15)
Реализация зависимостей (14) и (15) не требует измерения координаты Ь0 Для Аункций (6), (9), напримерt аервьш нелинейный преобразователь будет определен зависимостью
h EiYii i , (16)
т,+т2и(а+т4иР|1
Получим передаточные функции длк отдельных частей системы, содержащих нелинейные звенья. Для этого произ- ведем линеаризацию нелинейностей.
Линеаризованные уравнения двигателя
i йю в дь+ 9н5в ш + 9MjB . dt 3h uh co ЗРК а
рк
-им
Ц9
(18)
где u(0 , uh, ДРК,ДМ - отклонегия
(вариации) частоты вращения вала двигателя, перемещения топливодозирующего органа5 давления наддува и момента нагрузки соответственно 9 ММ в в ЭМаь ЭМав
TS -J5T ЭРГ чаотные пронз
водные момента двигателя по соответствующим переменным. Момент сопротивления Кс((0) учитывается в первом нелинейном преобразователе традиционным способом. Если ввести величину эквивалентного момента двигателя в виде
м (Ь,СО,РК)М (ь,со,рк)-мс(«)5
w о аргументы Функции F(, ) coвершенно не изменяются. Необходимо разрешить относительно величины h (Ьункцию МЭ(дд(Ь,(0,Р,с), которая является моментной характеристикой двига теля, уменьшенной на величину М(й5).
Линеаризованные уравнения турбокомпрессора
dAPK Эт ,. Зт . 9т 5Г - Щ ihr+ 5h 5h 9ou(lH
а- о
К
(19)
где &hr - отклонение (вариация) перемещения регулирующего органа турбины; .
Зт 9т Я т Зт
9hf §h §Ь ЭРК частные производные функции Т по соответствующим переменным.
Линеаризованные уравнения для нелинейных преобразователей получим из (14), (Т5) с учетом (11), (12), (13). Здесь используется также известное правило дифференцирования обратных Функций„
Тогда
.. c)F( Эмва ... 9F, .,.
йЬ Ям« gvj-&V 7 ыо+
9г, 3auw+$pЈ
UPK
Система управления для двигателя внутреннего сгорания с наддувом, содержащая датчик перемещения топливо- дозирующего органа, первый измеритель рассогласования с двумя входами, один из которых связан с выходом задающего устройства, а другой - с датчиком 15 частоты вращения, датчик давления наддува, два усилителя, второй измеритель рассогласования с тремя входами, один из которых связан с датчиком давления наддува, а два других входа через усилители связаны соответственно с датчиком перемещения топливодо- зирующего органа и датчиком частоты вращения и два корректирующего звена, одно из которых входом связано с вы-
ч
ходом первого измерителя рассогласования и выходом связано с приводом топливодозирующего органа, а другое корректирующее зрено входом связано
25
,- к,„(.«, .,- |й. 4,„
д 9F2 9T Mr.te. З.г-u.
льт W 3V2 UV 9iT Ah+ 9ш UG
+ IF bvfe 1 (1К li h
А о ат м ЗТ тс выходом второго измерителя рассо(:-) t-iCiJ-J-rr) /Го Рк (21 30 гласования и выходом подключено к ЗсО 3hT
ЭР,
гану регулирования давления наддува, отличающаяся тем, что, с целью стабилизации динамических характеристик, система снабжена первым
Структурная схема линеаризованной системы представлена на фиг0 3, из которой следует, что при условиях
гану регулирования давления наддува, отличающаяся тем, что, с целью стабилизации динамических характеристик, система снабжена первым
(11)9 (12), (13) и точной настройке чнелинейным преобразователем с тремя
нелинейных преобразователей, сигналывходами и вторым нелинейным преобрас выходов последних компенсируютзователем с четырьмя входами, -каждый
соответствующие сигналы с выходов дви-преобразователь выполнен в виде уси-
гателя и турбокомпрессора таким об-лителя, дифференцирующих звеньев по
разом, что передаточная функция под- 40количеству входов преобразователя и
системы выход первого корректирующего звена - выход двигателя стано- вится равной передаточной функции интегрирующего звена, т.е.
сумматора, количество входов которого равно количеству входов преобразователя, причем первый вход--каждого сумматора через усилитель связан с д5 выходом корректирующего звена, осталь ные входы выполнены вычитающими, второй и третий входы сумматора через дифференцирующие звенья связаны соответственно с датчиком давления над- дува и датчиком частоты вращения, выходы сумматоров первого и второго преобразователей связаны соответствен но с приводом топливодозирующего органа и органом регулирования давления наддува, а четвертый вход сумматора второго преобразователя через дифференцирующее звено связан с датчиком перемещения топливо-дозирующего органа
ww (S)- „ к, Vsb Јv(s) is
(22)
Передаточная функция подсистемы выход второго корректирующего звена - выход турбокомпрессора также равна передаточной функции интегрирующего звена
Р
-lisj г-, Ч
Таким образом, система управления становится нечувствительной к изменению скоростных и нагрузочных режимов (то есть к параметрам h, hf,CO, ,
- Ш - г ««
Рк) и, следовательно, с помощью введения нелинейных связей, реализуемых с помощью двух нелинейных преобраэо- вателей, происходит стабилизация динамических характеристик системы. Формула изобретения
Система управления для двигателя внутреннего сгорания с наддувом, содержащая датчик перемещения топливо- дозирующего органа, первый измеритель рассогласования с двумя входами, один из которых связан с выходом задающего устройства, а другой - с датчиком 5 частоты вращения, датчик давления наддува, два усилителя, второй измеритель рассогласования с тремя входами, один из которых связан с датчиком давления наддува, а два других входа через усилители связаны соответственно с датчиком перемещения топливодо- зирующего органа и датчиком частоты вращения и два корректирующего звена, одно из которых входом связано с вы-
ч
ходом первого измерителя рассогласования и выходом связано с приводом топливодозирующего органа, а другое корректирующее зрено входом связано
0
5
гану регулирования давления наддува, отличающаяся тем, что, с целью стабилизации динамических характеристик, система снабжена первым
сумматора, количество входов которого равно количеству входов преобразователя, причем первый вход--каждого сумматора через усилитель связан с 5 выходом корректирующего звена, остальные входы выполнены вычитающими, второй и третий входы сумматора через дифференцирующие звенья связаны соответственно с датчиком давления над- дува и датчиком частоты вращения, выходы сумматоров первого и второго преобразователей связаны соответственно с приводом топливодозирующего органа и органом регулирования давления наддува, а четвертый вход сумматора второго преобразователя через дифференцирующее звено связан с датчиком перемещения топливо-дозирующего органа
5
ю
9
WJ
W П - 13
I 21Ъ
u nt L
щ/i ff
i (
77
ШЧЗ-гЩт
п
8
1
%Ял,
W МН + Jk-
LE
«NJ
SJ
tr
«V)
I
S J5
