Изобретение относится к автоматике, в частности к устройствам для управления роботами, и может быть использовано при построении автоматизированных систем принятия решения с диалоговым режимом работы при управлении перемещением роботов.
Цель изобретения состоит в повышении точности устройства.
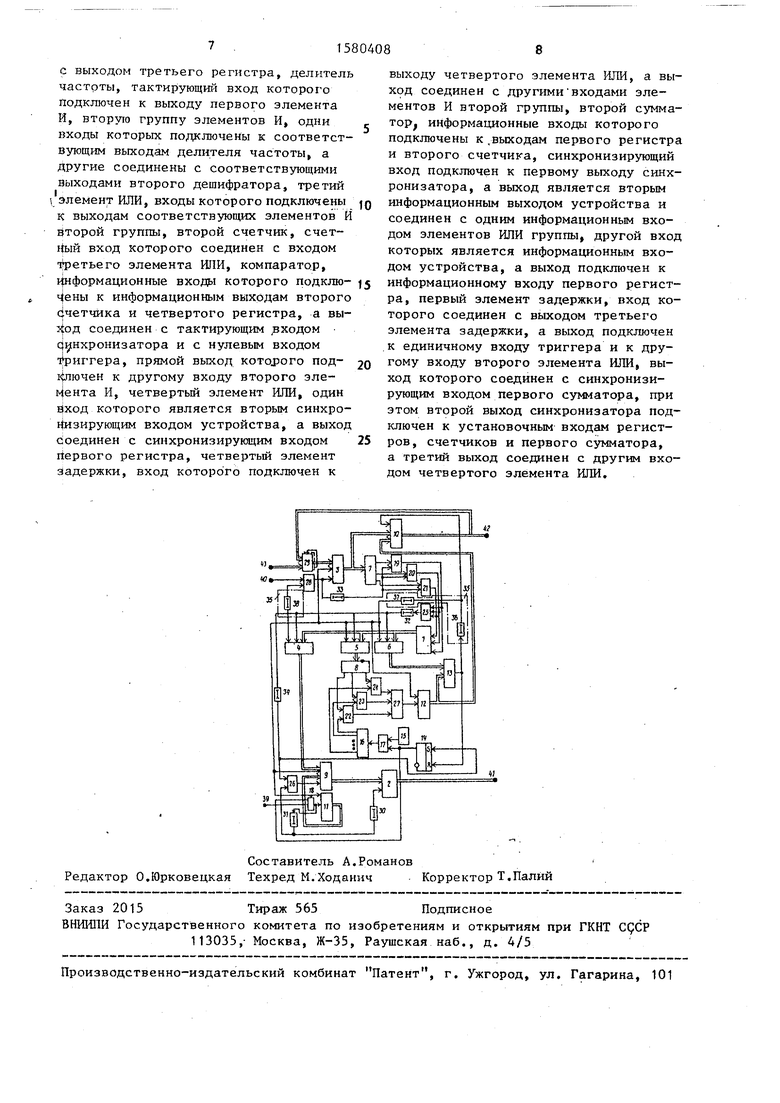
На чертеже представлена блок-схема устройства.
Устройство содержит первый 1 и второй 2 блоки памяти, выполненные в виде постоянных запоминающих устройств, в фиксированные ячейки которых постоянно занесена соответствующая информация, первый 3, второй 4, третий 5 и четвертый 6 регистры, первый 7 и второй 8 дешифраторы, первый
9 и второй 10 сумматоры, первый 11 и второй 12 счетчики, компаратор 13, триггер 14, генератор 15 импульсов, делитель 16 частоты, первый 17 и второй 18 элементы И, первая 19-21 и вторая 22-24 группы элементов И, первый 25, второй 26, третий 27 и четвертый 28 элементы ИЛИ, группа 29 элементов ИЛИ, первый 30, второй 31, третий 32, четвертый 33 и пятый 34 элементы задержки и синхронизатор 35, включающий элементы 36-38 задержки.
Кроме того, на схеме показаны первый 39 и второй 40 синхронизирующие входы, первый 41 и второй 42 информационные выходы и информационный вход вход 43.
Устройство работает следующим образом.
ел
00
о
4
О 00
10
5
i 31580408
Перед началом работы оператор устанавливает все узлы в нулевое состояние (цепи не показаны), и на пульте управления набирает код местоположения робота, который поступает на информационные, входы регистра 3 через элементы ИЛИ 29 с входа 43. Затем оператор нажимает клавишу Пуск (не показана), сигнал с выхода которой поступает на вход 40 и далее через элемент ИЛИ 28 на синхронизирующий вход регистра 3, записывая в него коды координат робота. Код местополо- жеНия робота в регистре 3 расшифровывается дешифратором 7, который на одном из своих выходов, соответствующем коду координат, выдает высокий потенциал, открывающий один из элементов И 19-21, Импульс пуска, задержанный элементом 33 на время срабатывания дешифратора 7, в качестве импульса спроса с выхода элемента 33 проходит через один из открытых элементов И 19-21 на вход считывания соответствующей фиксированной ячейки,блока 1 памяти и на вход элемента ИЛИ 25. Каждая из фиксированных ячеек блока памяти содержит код координат местоположения робота на картографическом фоне, код коэффициента пересеченности (трудпопроходимости) траектории в точке местоположения робота и код времени, необходимого роботу на прохождение участка траектории с заданным
20
25
Ю
И 17 и генератор тактовых импульсов подключается к делителю-16 частоты. Последний имеет столько выходов, сколько значений коэффициента трудпопроходимости может быть задано регистром 5. Дешифратор 8 расшифровывает код коэффициента труднопроходимое™ и открывает ему один из элементов И 22-24, на входы которых подаются последовательности импульсов с соответствующей частотой повторения. Импульсы с делителя 16 частоты с того его выхода, который оказывается подключенным к открытому по другому входу высоким потенциалом дешифратора 8 одному из элементов И 22-24, проходят через элемент ИЛИ 27 и поступают на счетный вход счетчика 12. Как только счетчик 12 зафиксирует код, который равен коду, хранящемуся в регистре 6, срабатывает компаратор 13, выходной сигнал которого сбрасывает триггер 14 в исходное состояние и прекращает тем самым счет импульсов в счетчике 12. Естественно, что чем более труднопроходимым является участок траектории, тем меньше частота следования импульсов с соответствующего выхода делителя 16 частоты, подключенного к входу счетчика 12, и тем самым меньше скорости его заполнения до сравнения с кодом регистра 6. Кроме того, импульс компаратора, задержанный на время переходных процессов
шагом. Поступивший на вход соответст- 35 в. счетчике 12 элементом 36, поступаИ 17 и генератор тактовых импульсов подключается к делителю-16 частоты. Последний имеет столько выходов, сколько значений коэффициента трудпопроходимости может быть задано регистром 5. Дешифратор 8 расшифровывает код коэффициента труднопроходимое™ и открывает ему один из элементов И 22-24, на входы которых подаются последовательности импульсов с соответствующей частотой повторения. Импульсы с делителя 16 частоты с того его выхода, который оказывается подключенным к открытому по другому входу высоким потенциалом дешифратора 8 одному из элементов И 22-24, проходят через элемент ИЛИ 27 и поступают на счетный вход счетчика 12. Как только счетчик 12 зафиксирует код, который равен коду, хранящемуся в регистре 6, срабатывает компаратор 13, выходной сигнал которого сбрасывает триггер 14 в исходное состояние и прекращает тем самым счет импульсов в счетчике 12. Естественно, что чем более труднопроходимым является участок траектории, тем меньше частота следования. импульсов с соответствующего выхода делителя 16 частоты, подключенного к входу счетчика 12, и тем самым меньше скорости его заполнения до сравнения с кодом регистра 6. Кроме того, импульс компаратора, задержанный на время переходных процессов

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования подвижных объектов | 1987 |
|
SU1539791A1 |
| Устройство для формирования координат траекторий движения объектов | 1988 |
|
SU1721625A1 |
| Устройство для контроля перемещения подвижных объектов | 1989 |
|
SU1652965A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ - МАНИПУЛЯТОРОМ | 1989 |
|
RU2044619C1 |
| Устройство для считывания и обработки информации | 1988 |
|
SU1585813A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУЧЕНИЕМ ОЦЕНКИ КАЧЕСТВА ЗНАНИЙ В СИСТЕМЕ ДИСТАНЦИОННОГО ОБУЧЕНИЯ | 2001 |
|
RU2248610C2 |
| Устройство для распознавания образов | 1989 |
|
SU1605268A1 |
| Устройство для селекции признаков подвижных объектов | 1989 |
|
SU1691860A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА И ПЕРЕДАЧИ ИНФОРМАЦИИ | 1991 |
|
RU2023295C1 |
| Устройство для автоматизированного управления технологическим процессом водоснабжения города | 1986 |
|
SU1381431A1 |
Изобретение относится к автоматике, в частности к устройствам для управления перемещением робота, и может быть использовано при построении автоматизированных систем управления. Цель изобретения состоит в повышении точности устройства. Поставленная цель достигается путем реализации учета динамики подвижных объектов, особенно в точках изменения профиля траектории, в реальном масштабе времени, что достигается введением третьего и четвертого регистров, второго сумматора, второго счетчика, третьего элемента ИЛИ, входы которого подключены к выходам соответствующих элементов И второй группы, четвертого элемента ИЛИ, второго дешифратора, делителя частоты, компаратора, второй группы элементов И и элементов задержки. 1 ил.
вующей фиксированной ячейки импульс считывания считывает ее содержимое в регистры 4-6. При этом на информационные входы регистра 4 поступают коды координат местоположения робота, на информационные входы регистра 5 поступает код коэффициента труднопроходим ости данного участка траектории, а на информационные входы регистра 6 40
ет на синхронизирующий вход сумматора 10, который по этому сигналу формирует сумму кода.исходного место-i положения, хранящегося в регистре 3, и кода приращения, полученного в счетчике 12. Результат суммирования кодов с выхода 42 выдается на диспле дпя отображения нового местоположени робота, а также поступает на информа
ксд, пропорциональный - времени,которое 45 ционные входы регистра 3 через.эледолжен затратить подвижный объект на преодоление заданного участка.
Параллельно с этим тот же импульс считывания, пройдя элемент ИЛИ 25,
и задержанный на элементе 32 на время 50 импульса сброса поступает также на
считывания кода из блока 1 памяти, поступает на синхронизирующие входы регистров 4-6. Кроме того, тот же импульс синхронизации занесения кодов после задержки на элементе 34 на вре- 55 мя занесения кодов поступает на единичный вход триггера 14 и устанавливает его в единичное состояние, при котором через открывающийся элемент ,
ет на синхронизирующий вход сумматора 10, который по этому сигналу формирует сумму кода.исходного место-i положения, хранящегося в регистре 3, и кода приращения, полученного в счетчике 12. Результат суммирования кодов с выхода 42 выдается на дисплей дпя отображения нового местоположения робота, а также поступает на информационные входы регистра 3 через.элементы ИЛИ группы 29. Задержанный импульс компаратора с элемента 37 задержки, где задерживается на время срабатывания сумматора -10, в качестве
нулевые входы регистров 3-6 и счетчика 12, устанавливая их в исходное состояние. Этот же импульс сброса через элемент 38 задержки, задерживающий его на время установки в исходное состояние упомянутых элементов, поступает через элемент ИЛИ 28 на синхронизирующий вход регистра 3, занося в него код, поступающий с информационных выходов сумматора 10, и затем после задержки на элементе 33 в качестве импульса спроса поступает на импульсные входы элементов И 19-21, и описанный процесс повторяется.
Для того, чтобы отображение положения робота на экране дисплея осуществилось на фоне траектории, проходящей по территории цеха, завода и т.п., в регистр 5 заранее закладывается соответствующий фон, а на вход 39 подаются синхроимпульсы строчной развертки дисплея.
Импульсом с выхода элемента 34 задержки, задержанным на время записи кода в регистр 4, код регистра 4, поступающий на информационные входы сумматора 9, записывается в него.
Каждый строчный импульс с входа 39 через элемент И 18 на потенциальном разрешении триггера 14 проходит на счетный вход счетчика 11. Затем задерживается элементом 31 задержки на время переходных процессов в счетчике 11 и через элемент ИЛИ 26 поступает на синхронизирующий вход сумматора 9, который к базовому коду регистра 4 прибавляет единицу. Выходной результат сумматора 9 является адресом ячейки блока 2, в который записан фон на соответствующей строке дисплея. После этого тот же импульс, задержанный на элементе 30 на время срабатывания сумматора 9, поступает на вход считывания блока 2, после чего на выход 41 выдается информация о необходимом фоне в соответствующей строке.
Счетчик 11 считает строчные импульсы до числа 512, которое составляет число строк кадра на экране, после чего он переполняется, импульсы переполнения сбрасываются в ноль, и вновь подсчитывает поступающие синхроимпульсы строк в заданном кадре.
Смена кадра осуществляется за время, в течение которого триггер 14 находится в нулевом состоянии. В это время элемент И 18 заперт низким потенциалом триггера 14, сумматор 9 и счетчик 11 сначала сбрасываются в ноль импульсом сброса с выхода элемента 34 задержки, а затем через элемент 34 задержки в сумматор 9 заносится базовый адрес нового местоположения робота.
Таким образом, введение новых узлов и элементов позволяет не только I расширить функциональные возможности устройства путем учета динамики пере- мещения робота в реальном масштабе
времени, но и повысить точность системы путем исключения потери времени на предварительную обработку координат положения и учесть влияние внешних условий. Формула изобретения
Устройство для определения коор- 5 динат подвижных объектов, содержащее первый регистр, информационные выходы которого соединены с входами первого дешифратора, выходы которого подключены к одним входам элементов И пер- 0 вой группы, а выходы соединены с входами первого элемента ИЛИ и соответствующими входами считывания первого блока памяти, второй регистр, информационные входы которого подключены 5 к выходам первого блока памяти, а выходы соединены с одними информационными входами первого сумматора, другие информационные входы которого подключены к выходам первого счетчика, 0 а выходы соединены с адресными входами второго блока памяти, вход считывания которого подключен к выходу первого элемента задержки, а информационные выходы являются первым инфор- мационным выходом устройства, первый элемент И, входы которого соединены с прямым выходом триггера и выходом генератора импульсов, второй элемент И, один вход которого является первым д синхронизирующим входом устройства, а выход соединен со счетным входом первого счетчика и с входом второго элемента задержки, выход которого подключен к входу первого элемента с задержки и к одному входу второго
элемента ИЛИ, третий элемент задержки, вход которого соединен с выходом первого элемента ИЛИ, а выход подключен к синхронизирующему входу второго Q регистра, синхронизатор и группу элементов ИЛИ, отличающееся тем, что, с целью повышения точности устройства, оно содержит третий и четвертый регистры, информационные входы которого соединены с выходом первого блока памяти, а синхронизирующие входы подключены к выходу третьего элемента задержки, второй дешифратор, входы которого соединены
5
с выходом третьего регистра, делитель частоты, тактирующий вход которого подключен к выходу первого элемента И, вторую группу элементов И, одни входы которых подключены к соответствующим выходам делителя частоты, а другие соединены с соответствующими выходами второго дешифратора, третий элемент ИЛИ, входы которого подключены К выходам соответствующих элементов И второй группы, второй счетчик, счетный вход которого соединен с входом третьего элемента ИЛИ, компаратор, информационные входы которого подклю- Цены к информационным выходам второго счетчика и четвертого регистра, а выход соединен с тактирующим входом ринхронизатора и с нулевым входом триггера, прямой выход которого под- к лючен к другому входу второго элемента И, четвертый элемент ИЛИ, один йход которого является вторым синхронизирующим входом устройства, а выход соединен с синхронизирующим входом Первого регистра, четвертый элемент задержки, вход которого подключен к
выходу четвертого элемента ИЛИ, а выход соединен с другими входами элементов И второй группы, второй сумматор, информационные входы которого подключены к .выходам первого регистра и второго счетчика, синхронизирующий вход подключен к первому выходу синхронизатора, а выход является вторым информационным выходом устройства и соединен с одним информационным входом элементов ИЛИ группы, другой вход которых является информационным входом устройства, а выход подключен к информационному входу первого регистра, первый элемент задержки, вход которого соединен с выходом третьего элемента задержки, а выход подключен к единичному входу триггера и к другому входу второго элемента ИЛИ, выход которого соединен с синхронизирующим входом первого сумматора, при этом второй выход синхронизатора подключен к установочным входам регистров, счетчиков и первого сумматора, а третий выход соединен с другим входом четвертого элемента ИЛИ.
| Устройство для бурения криволинейных шпуров | 1985 |
|
SU1331987A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Патент США S 3801775, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
