Изобретение относится к автоматике, в частности к устройствам для считывания и обработки информации при управлении перемещением робота- переносчика, и может быть использовано в системах автоматизации технологических процессов.
Цель изобретения - повьшение точности и быстродействия устройства.
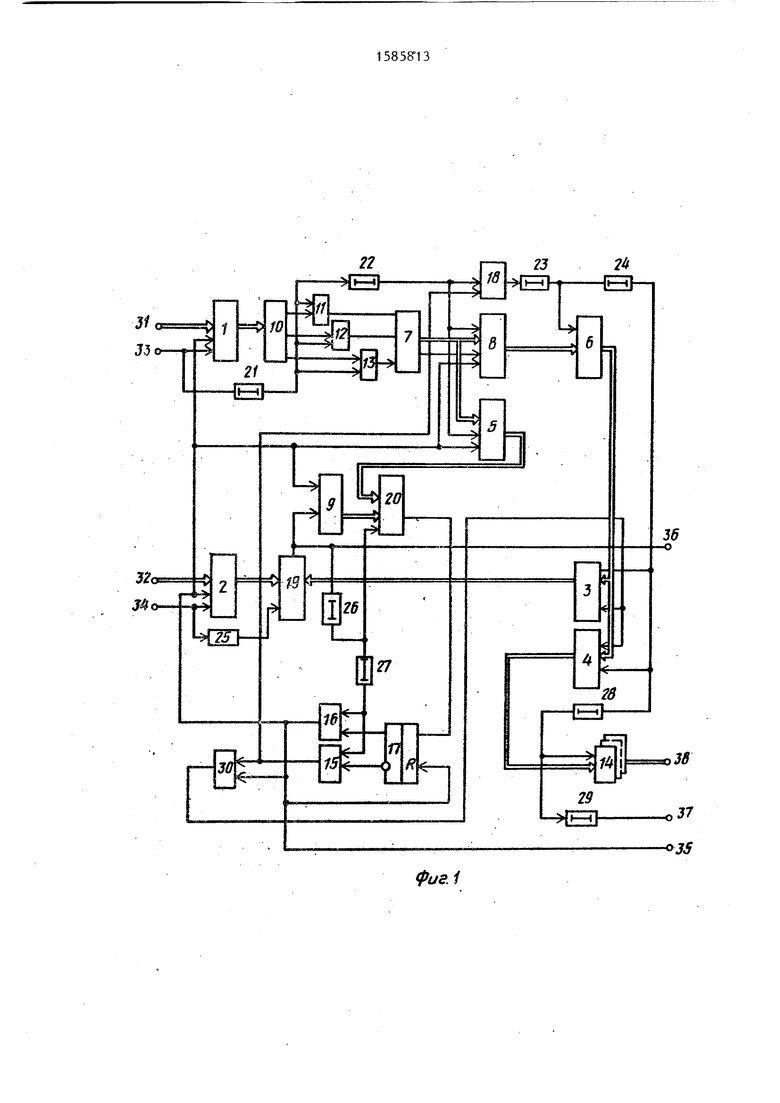
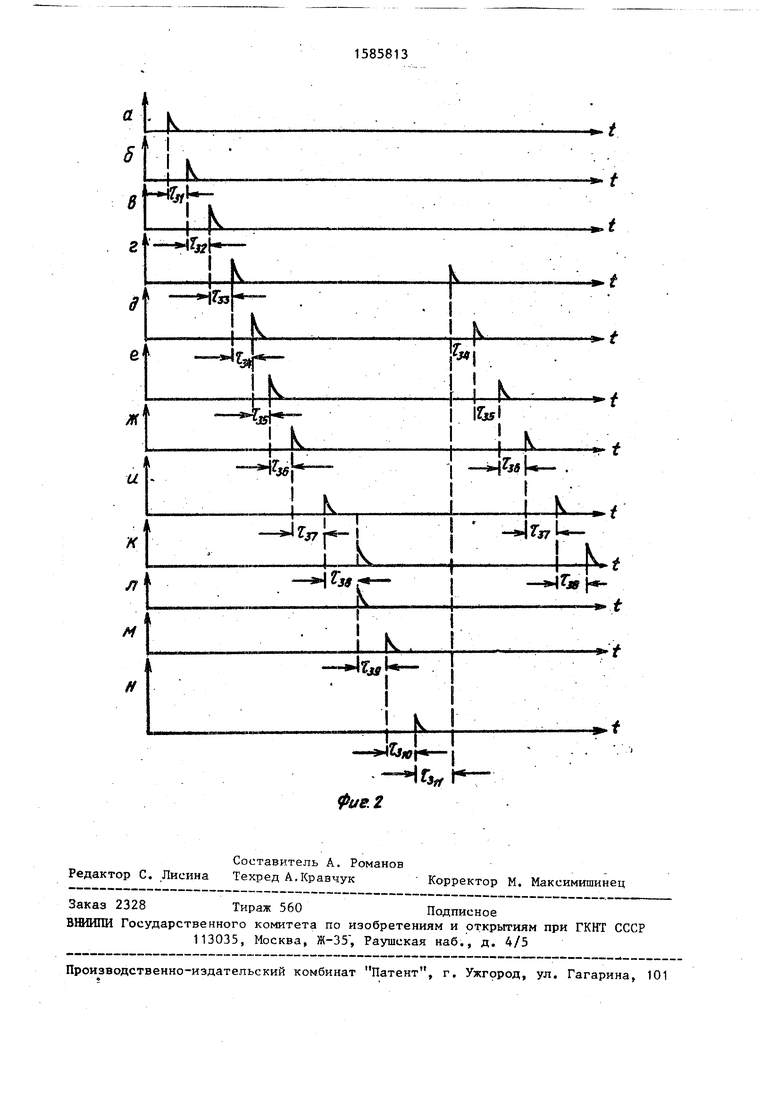
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - временные диаграммы, поясняющие работу устройства.
Устройство содержит первый 1, второй 2, третий 3, четвертый 4 и пятый 5 регистры, первый блок 6 памяти, выполненный в виде оперативного запоминающего устройства (ОЗУ), второй блок 7 памяти, выполненньй в виде постоянного запоминающего устройства (ПЗУ), первьш 8 и второй 9 счетчики.
дешифратор 10, первую 11-13 и вторую 14 группы элементов И, первый 15 и второй 16 элементы И, триггер 17, первый элемент ИЛИ 18, первый 19 и второй 20 компараторы, первый 21, второй 22, третий 23, четвертый 24, пятый 25, шестой 26, седьмой 27, восьмой 28 и девятьй 29 элементы задержки и второй элемент ИЛИ 30, а также первый 31 и второй 32 информационные входы, первый 33 и второй 34 синхронизирующие входы, первый 25, второй 36 и третий 37 синхронизирующие выходы и информационный вход 38. Устройство работает следующим образом.
Под плоской поверхноЬтью поля считывания устанавливают постоянные магниты с различной коэрцитивной силой. На роботе-переносчике устанавливают съемник координат, расположен(Л
с
СП
эо :д
2
lio
ный непос зедственно над полем считывания и формирующий сигнал в моме нахождения робота-переносчика над соответсткующим постоянным магнитом величина амплитуды которого определется величиной коэрцитивной силы этго магнита.
Перед началом работы устройства все узлы и элементы сбрасываются в исходное состояние (цепи для упрощения чертежа не показаны), в блок 6 памяти записываются кортежи координат постоянных магнитов, составляющие все маршруты, по которым может перемещаться робот-переносчик. Базовые адреса памяти в блоке 6, с которых начинаются соответствующие маршруты, записываются в ПЗУ 17, Съемник координат устанавливается в исходное состояние и на его информационный, вход 31 подается код номера маршрута, который по сигналу с входа 33, подаваемому на синхронизирующий вход регистра 1, заносится в регистр 1, Код номера маршрута, рас- шифровывается дешифратором 10 и на соответствующем его выходе появляется высокий потенциал, подаваемый на вход одного из элементов И 11-13, на другие входы которьзх подается импульс с выхода элемента 21 задержки, задержанный на время срабатывания регистра 1 и дешифратора 10 (фиг. 26).
Импульс, прощедший через открытый элемент 11-13 И, поступает на вход соответствующей фиксированной ячейки памяти ПЗУ 7 и считывает ее содержимое на информационные входы счетчика В и регистра 5,
Структура фиксированной ячейки ПЗУ 7 имеет следующий вид:
Г
Старшие разряды
Младшие разряды
Код числа постоянных магнитов, составляющих длину маршрута
На. информационный вход счетчика 8 .поступает код базового адреса данного маршрута, а ка. информационный вход регистра 5 поступает код числа постоянных магнитов, составляющих длину указанного маршрута. Информ:а- ция заносится в счетчик 8 и регистр 5 синхроимпульсом с выхода элемента задержки (фиг. 2в).
С информационного выхода счетчика 8 код базового адреса поступает на адресный вход блока 6 памяти, а на вход считывания через элемент ИЛИ 18 и элемент 23 задержки поступает синхроимпульс и считывает содержимое ячейки по указанному базовому адресу на информационный выход блока 6 (фиг. 2г). В ячейках блока 6 памяти,- начиная с базового адреса, записана следующая информация; „.
Младшие разряды
Идентификационный код координат постоянного магнита
Код направления дальнейшего движения
0
5
0
0
5
0
5
Эта информация с выхода блока 6 памяти импульсом синхронизации, задержанным элементом 24 задержки на время считывания данных из блока 6 памяти, заносится в регистры 3 и 4 соответственно (фиг, 2д), После задержки элементом 28 задержки на время установления переходных процессов в регистре 4 синхроимпульс с выхода элемента 28 поступает на.вход элементов И 14 группы и через выход 38 выдает код направления движения на исполнительный механизм (фиг,2е), Этот же импульс, задержанный элементом 29 задержки на время отработки исполнительным механизмом кода направления движения, выдается с выхода 37 как импульс Пуска, по которому исполнительный механизм начинает перемещать робот-переносчик в заданном направлении по заданному маршруту, В процессе перемещения робота-переносчика его индуктивный датчик, встречаясь с очередным магнитом на заданном, маршруте, формирует сигнал, амплитуда которого прямо пропорциональна коэрцитивной силе данного магнита и, следовательно, его координатному положению на плоскости,
Амплитуда этого сигнала преобразуется АЦП в код (не показан), который поступает на информационный вход 32J и импульсом синхронизации с входа 34 заносится в регистр 2, С выхода последнего код поступает на один вход компаратора 19s на другой вход которого поступает идентификационный код того магнита с регистра 3 через который должен на этом маршруте проследовать робот-переносчик. Факт совпадения кодов фиксируется синхроимпульсом, пocтyпaющи i с выхода элемента 25 задержки на синхровход компаратора 19 (фиг. 2к),
С выхода компаратора 19 этот же импульс поступает на счетный,вход счетчика 9, подсчитывающего число пройденных постоянных магн.итов, и через выход 36 как сигнал .Промежуточный останов для проверки выполнения условия:.нужно ли менять направление движения. С этой цельга тот же импульс задерживается элементом 26 на время установления переходных процессов Е счетчике 9 и поступает на синхровход компаратора 20 (фиг. 2м) , сравниваюрдего показания регистра 5, где хранится число под- лелсащих прохождению магнитов, с показаниями счетчика 9, фиксирующего число уже пройденных магнитов. Вследствие того, что эти числа не равны (пройден лишь один магнит), на выходе компаратора никаких сигналов не присутствует и на единичный вход триггера 17 управления никаких сигналов не поступает„ Последний остается в исходном нулевом состоянии, при котором на инверсном выходе при- сутст.вует высок1-гй потенциал, открывающий элемент И 15- по одному входу, а на прямом выходе - низкий потенциал, закрывающий по одному входу элемент К 16.
В результате этого импульс с выхода элемента 27 задержки, задержан- ньш на время возможного срабатывания компаратора 20 и триггера 17, проходит через элемент И 15 (фиг. 2н) как на нулевые входы регистров 3 и 4, сбрасывая их в исходное состояние, так и на счетный выход счетчика 8, увеличивая содержимое базового адреса выбранного маршрута на единицу, а через элемент ИЛИ 18 и элемент 23 задержки, задерживающий импульс на время переходных процессов в счетчике 8, поствпает на вход считывания блока 6 памяти (фиг., 2н) и вновь считывает содержимое следующей ячейки памяти на входы регистров 3 и 4, а задержанным на элементе 24 задержки импульсом, поступающим на синхро- входы регистров 3 и 4, осуществляется занесение кодов в регистры 3 и 4 (фиг. 2д).
1585813
5
5
Лалее процесс выдачи управляющих сигналов продолжается указанным образом до тех пор, пока показания регистра 5 и счетчика 9 не становятся равными. Тогда импульсом с выхода компаратора 20 триггер 17 устанавливается в единичное состояние, при котором элемент И 16 открыт, а элемент И 15 закрыт. Б этом случае им- щ льс, задержанный элементом 27 задержки, прохо.дит через элемент И 16 на выход 34 устройства в качестве сигнала окончания перемещения робота- переносчика по заданному маршруту, а также поступает на нулевые входы триггера 17, счетчиков 8 и 9, регистров 1-5, возвращая их в исходное состояние. После этого в регистре 1 устанавливается код очередного мар- огоута и работа устройства осуществляется аналогичным образом. i
Таким образом, введение новых узлов и блоков позволяет повысить точ- нсч;ть и быстродействие предлагаемого объекта, исключив необходимость ручного управления перемещением робота- переносчика.
30.Формул а изобретения
Устройс:тво для считывания и обработки 11нформации5 содержащее первый регистр, информационный вход которого является первым информационным входом устройства, синхронизирующий вход является первым синхронизиру- ющш.; входом устройства, а выход со- с информационным входом дешифратора, выходы которого подключены к одним входам элементом И первой группы, другие входы которых соединены с выходом первого элемента задержки, вход которого подклдочен к пepвo fy синхронизирующему входу устройства, В1 орой регистр, информационный вход которого является вторым информациок- ны.1 входом устройства, синхронизирующий вход является вторым синхронизирующим входом устройства, первый блок памяти, информационный выход которого подключен к информационным входам третьего и четвертого регистров, пер5
0
5
0
вый элемент РИГИ, один вход которого соединен с выходом перво.го элемента li, один вход которого подключен к инверсному выходу триггера управления, прямой выход которого соединен с одним входом ; второго элемента И, выход KOToiJoro является синхронизирующим выходом устройства, вторую грздп пу элементов И, одни входы которых подключены к выходам четвертого ре- гистра, а выходы являются информационным выходом устройства, второй элемент задержки, вход которого подключен к выходу первого элемента задержки, а выход соединен с другим входом первого элемента ИШ, выход которого подключен к входу третьего элемента задержки, выход которого соединен с входом считывания первого блока памяти, и первый счетчик, от- личающееся темв что, с целью повышения точности и быстродействия устройства, оно содержит второй блок памяти, входы считывания которого соединены с выходами элемен тов И первой группы, а выходы пoдкJш чены к инфр,рмационному входу первого счетчика, синхронизирующий вход подключен к выходу второго элемента задержки, счетный вход соединен с вы- ходом первого элемента И, а выход подключен к адресному входу первого блока памяти, четвертый элемент задержки, вход которого соединен с выходом третьего элемента задержки, а выход подключен к синхронизирующим входам третьего и четвертого регистров, пятый регистр, информационный вход которого подключен к информационному выходу второго блока памяти синхронизирующий вход соединен с выходом второго элемента з адержки, а установочный вход подключен к выходу второго элемента И, пятый э лемент
задержки, вход которого соединен с
вторым синхронизирующим входом устройства, первый компаратор, информа..,.
ционные входы которого подключены к выходам второго и третьего регистров, синхронизирующий вход соединен с выходом пятого элемента задержки, а выход является вторым синхронизирующим входом устройства, шестой элемент задержки, выход которого подключен к выходу первого компаратора, второй счетчик, счетный вход которог соединен с выходом первого компаратора, а установочный вход подключен к выходу второго элемента И, второй компаратор, информа.ционные входы которого соединены с информационными выходами второго счетчика и пятого регистра, синхронизирующий вход подключен к выходу шестого элемента задержки, а выход соединен с единичным входом триггера управления, нулевой вход которого подключен к выходу второго элемента И, седьмой элемент задержки, вход которого соединен с выходом шестого элемента задержки, а выход подключен к другим входам первого и второго элементов И, последовательно соединенные восьмой элемент задержки, вход которого подключен к выходу четвертого элемента задержки, а выход - к другим входам элементов И второй группы, и девятый элемент задержки, выход которого является третьим синхронизирующим выходом устройства, второй элемент ИЛИ входы которого соединены с выходами первого и второго элементов И, а выход подключен к установочным входам третьего и четвертого регистров, при этом выход второго элемента И соединен с установочными входами первого и второго регистров.
f -Я
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат подвижных объектов | 1988 |
|
SU1580408A1 |
| Устройство для формирования координат траекторий движения объектов | 1988 |
|
SU1721625A1 |
| Устройство для селекции признаков подвижных объектов | 1989 |
|
SU1691860A1 |
| Устройство для контроля перемещения подвижных объектов | 1989 |
|
SU1652965A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ - МАНИПУЛЯТОРОМ | 1989 |
|
RU2044619C1 |
| СИСТЕМА СИТУАЦИОННОГО АНАЛИЗА ПАССАЖИРСКИХ ПЕРЕВОЗОК | 2004 |
|
RU2267810C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ПОВЫШЕНИЮ РЕНТАБЕЛЬНОСТИ АВИАПЕРЕВОЗОК | 2005 |
|
RU2294013C2 |
| УСТРОЙСТВО ДЛЯ РАЗГРАНИЧЕНИЯ ДОСТУПА ПОЛЬЗОВАТЕЛЕЙ К РАЗДЕЛАМ ТЕКСТОВЫХ ДОКУМЕНТОВ | 2001 |
|
RU2239866C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛУЧЕНИЕМ ОЦЕНКИ КАЧЕСТВА ЗНАНИЙ В СИСТЕМЕ ДИСТАНЦИОННОГО ОБУЧЕНИЯ | 2001 |
|
RU2248610C2 |
| Устройство для экспертной оценки экстремальных ситуаций | 1988 |
|
SU1550528A1 |
Изобретение относится к автоматике. Цель изобретения - повышение точности и быстродействия устройства. Это достигается путем повышения реакции на поступающие сигналы и учета важности информации, что одновременно повышает интеллектуальность робота и исключает участие человека в управлении перемещением робота-переносчика. Это обеспечивается введением четвертого, пятого, шестого, седьмого, восьмого, девятого элементов задержки, второго блока памяти, второго счетчиков, первого и второго компараторов, второго элемента ИЛИ. 2 ил.
г
W
и
/f
21 1н-П
i:;;
32с
/5
И
6 /
№
с
го
36 -о
И
/
J5
29
-Мь
4,7 -OJ5
ие.1
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для синхронизации импульсов | 1986 |
|
SU1368965A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
