Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов.
Цель изобретения - повышение долговечности.
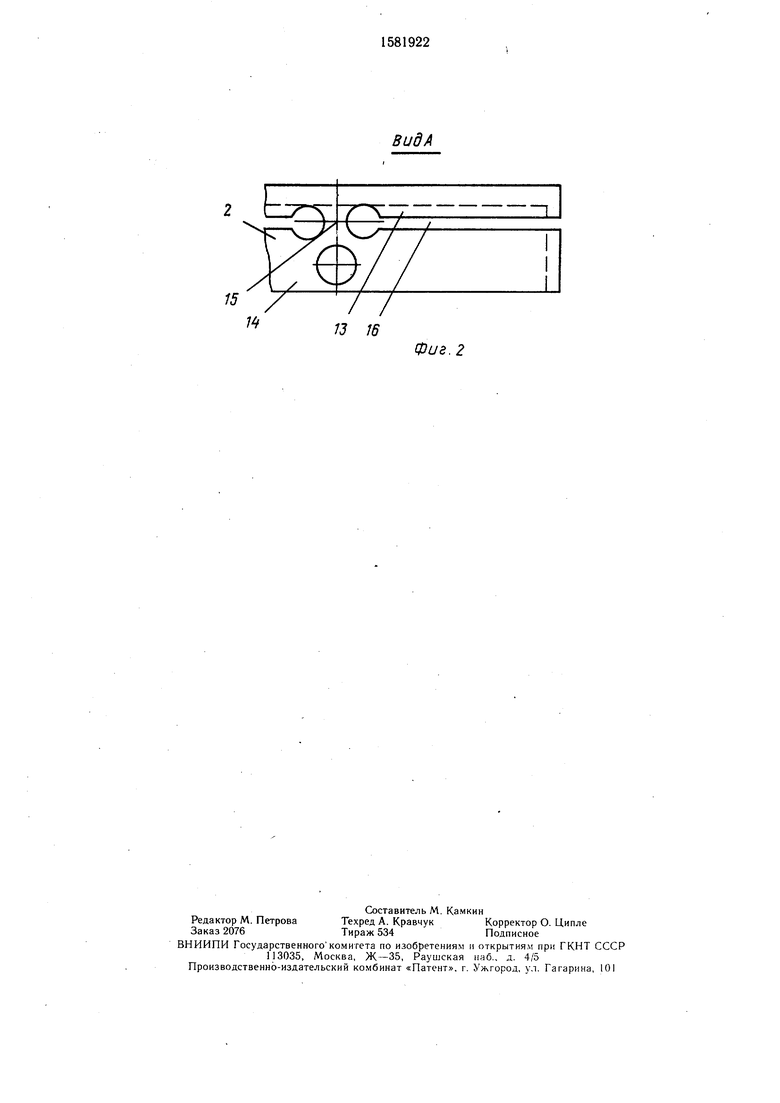
На фиг. 1 показан предлагаемый механизм свободного хода, общий вид; на фиг. 2 - вид А на фиг. 1.
Механизм содержит концентрично расположенные храповое колесо 1, обойму 2 и опорное упругое гофрированное кольцо 3. Каждый внутренний выступ последнего имеет неподвижное соединение 4 с одним концом пластины 5, второй конец которой контактирует с храповым колесом 1. Каждая из пластинчатых пружин 6 первого яруса одним концом соединена неподвижно элементом 7 с внешним выступом гофрированного кольца 3, другим концом - подвижно в точке контакта 8. Одноименные концы пружин 9 последующего яруса имеют
неподвижное соединение 10 с серединами соседних пружин 6 предыдущего яруса. Количество пластинчатых секторных пружин каждого последующего яруса выполнено в два раза меньшим предыдущего яруса, а угол сектора пружин последующего яруса превышает в два раза угол предыдущего. Концы пружин 11 последнего яруса имеют неподвижное соединение 12 с серединами пружин 9 предыдущего яруса. Обойма 2 имеет фланцевую 13 и кольцевую 14 части, которые связаны упругими элементами 15, образованными пазами 16. Середины последнего яруса пружин 11 имеют неподвижные соединения 17 с кольцевой частью 14 обоймы 2.
Механизм работает следующим образом.
При вращении храпового колеса 1 относительно обоймы 2 против часовой стрел- ки пластины 5 скользят по зубьям храпового колеса, а при вращении по часовой
сд
00
со
№ N3
стрелке упираются в его зубья, т. е. механизм включается. Усилие от пластин 5 передается гофрированному кольцу 3 через неподвижные соединения 4 и далее на пластинчатые пружины и обойму 2. Ввиду погрешностей изготовления элементов механизма всегда находятся одна или несколько пластин, первыми вступающими в контакт с зубьями храпового колеса 1. Такие пластины через неподвижное соединение 4 деформируют сопрягаемые с ними внутренние выступы гофрированного кольца 3. При этом происходит деформирование соседних внешних колец, образующих подвижные и неподвижные соединения с пластинчатыми пружинами первого яруса. Подвижные соединения наряду с податливостью кольца и пластинчатых пружин позволяют компенсировать погрешности изготовления элементов механизма: шага зубьев храпового колеса, длины пластин, размера выступа гофра и длины пластинчатых пружин первого яруса и др. Такие погрешности, как биение осей храпового колеса и обоймы, длин пластинчатых пружин последних ярусов компенсируются благодаря деформированию указанных пружин и упругих элементов 15 обоймы 2.
Ввиду разной жесткости выступов гофрированного кольца, а также пластинчатых пружин в направлении действия на них пластин 5 последние нагружены неодинаково. Однако указанная неравномерность,
0
5
0
0
а значит и нагрузочная способность механизма практически сохраняется независимо от износа гофрированного кольца и пластин б в подвижном контакте, так как указанный износ мало влияет на распределение усилий в элементах механизма. Все это позволяет в сравнении с известным устройством, в котором по мере износа возможна перегрузка и поломка пластин, увеличить долговечность механизма.
Формула изобретения
Храповой механизм свободного хода, содержащий концентрично установленные обой му и храповое колесо, расположенные между ними пластины, поджатые к храповому колесу упругим кольцом и размещенными между ним и обоймой упругими звеньями, отличающийся тем, что, с целью повышения долговечности, упругие звенья выполнены в виде установленных ярусами пластинчатых пружин, кольцо выполнено гофрированным с четным числом выступов, каждая пластина закреплена на внутреннем выступе кольца, пружины первого яруса закреплены одним концом на выступе кольца и контактируют другим концом со смежным выступом кольца с возможностью скольжения, каждая пружина последующего яруса жестко соединена с серединой двух смежных пружин предыдущего яруса, а середины пружин последнего яруса жестко соединены с обоймой.

| название | год | авторы | номер документа |
|---|---|---|---|
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2119601C1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2008 |
|
RU2382249C2 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |
| ХРАПОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2009 |
|
RU2398144C1 |
| ХРАПОВОЙ МЕХАНИЗМ АНТИМОСКИТНОЙ РУЛОННОЙ СИСТЕМЫ | 2010 |
|
RU2457372C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1997 |
|
RU2138707C1 |
| Храповой механизм свободного хода | 1981 |
|
SU1027448A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2010 |
|
RU2439389C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2008542C1 |
Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов. Цель изобретения - повышение долговечности механизма. Механизм содержит концентрично установленные храповое колесо 1 и обойму 2, пластины 5, опорное упругое кольцо (УК) 3, выполненное гофрированным, с четным числом внешних и внутренних выступов и пластинчатые пружины (П) 6, 9 и 11. Все внутренние выступы УК 3 образуют неподвижное соединение 4 с одним концом каждой пластины 5, а эластичные секторы выполнены в виде П 6, 9 и 11, которые установлены ярусами между обоймой 2 и УК 3. П 6 первого яруса соединены с УК 3 с помощью неподвижного 7 и подвижного 8 соединений. Все П последующих ярусов соединены между собой и обоймы неподвижно. При работе УК и П деформируются, компенсируя неточности изготовления. Несущая способность практически не зависит от величины износа в подвижном контакте, что повышает долговечность механизма. 2 ил.
17
Ю
12
11
74
ВидА
Фиг. 2
| Храповой механизм свободного хода | 1983 |
|
SU1089317A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
