00
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1987 |
|
SU1481706A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Система управления окомкованием железорудного сырья | 1989 |
|
SU1654626A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПАРА КОТЛОАГРЕГАТА | 1999 |
|
RU2151342C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
Изобретение относится к технике коррекции систем автоматического управления, может найти применение в химической,металлургической угольной промышленности, а также в промышленности строительных материалов и производстве минеральных удобрений, например, при обогащении руд на горнообогатительных фабриках. Предложено нелинейное корректирующее устройство, содержащее сумматор, соединенный первым входом с входами блока выделения модуля и дифференциатора, подключенного через ограничитель к первому входу первого умножителя, ко второму входу которого подключен выход блока выделения модуля, в котором дополнительно установлены делитель, второй умножитель и функциональный задатчик уровня ограничения, соединенный входом с первым входом сумматора, а выходом-с управляющим входом ограничителя и входом делителя, а второй умножитель соединен первым и вторым входами соответственно с выходом первого умножителя и выходом делителя, а выход его подключен к второму входу сумматора. Нелинейное корректирующее устройство позволяет повысить точность регулирования объектов с запаздыванием, а его применение для регулирования концентрации реагентов позволяет повысить извлечение металлов и снизить расход реагентов. 1 ил.
Изобретение относится к средствам коррекции систем автоматического управления и может быть применено в химической, металлургической, угольной промышленности, а также в промышленности строительных материалов и производства минеральных удобрений, например, при обогащении руд на горнообогатительных фабриках.
Цель изобретения - повышение точности регулирования устройства.
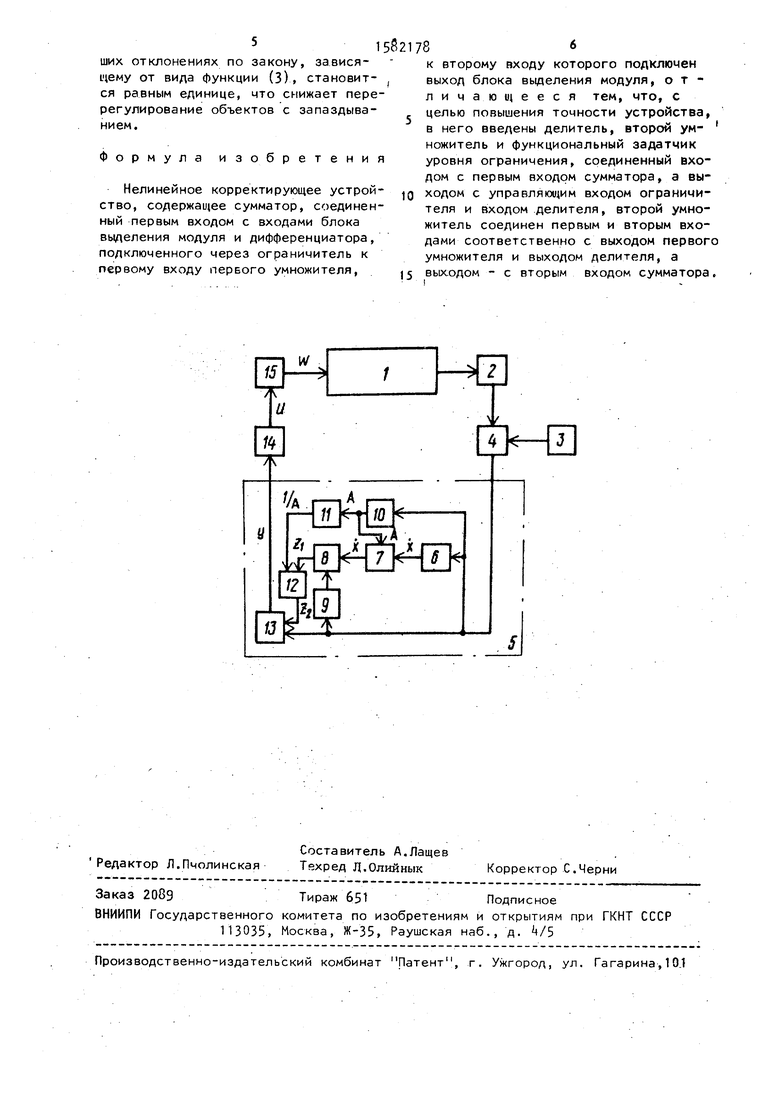
На чертеже приведена блок-схема устройства в составе системы регулирования.
Система регулирования включает объект 1 регулирования с запаздыванием, к выходу которого подключен датчик 2, подключенный совместно с
эадатчиком 3 к блоку k сравнения. Выход блока сравнения, являющийся уходом нелинейного корректирующего устройства 5, через дифференциатор 6, ограничитель 7 с изменяемым уровнем ограничения подключен на первый йход первого умножителя 8 и через блок 9 выделения модуля на его второ фход, а также на вход функционально- го задатчика 10 уровня ограничения. ыход последнего подключен к входу ограничителя 7, управляющего уровнем ограничения, и к делителю 11, формирующему сигнал, обратный входному.
рыходы делителя 11 и первого умножителя 8 через второй умножитель 12 подключены к второму входу сумматора 13, первый вход которого соединен f выходом блока k сравнения. Выход Ьумматора 13, являющийся выходом нелинейного корректирующего устройства 5, через регулятор 14 и исполнительное устройство 15 подключен к входу объекта регулирования 1 .
На чертеже приняты следующие обозначения: х - сигнал ошибки регулирования; х - выходной сигнал дифференциатора 6; X - выходной сигнал ограничителя 7, Z, - выходной сиг- ,нал первого умножителя 8, А - уровен ограничения (выходной сигнал функционального задатчика уровня ограничения 10); |х - выходной сигнал блока выделения модуля 9, 7 -г выходной сигнал второго умножителя 12; у - выходной сигнал сумматора 13; U - выходной сигнал регулирующего устройства , W - выходной сигнал исполнительного устройства 15.
Нелинейное корректирующее устройство в составе системы работает следующим образом.
Выходной сигнал объекта 1 регулирования измеряют датчиком 2, выход которого сравнивают с сигналом задатчика 3 в блоке k сравнения. Сигнал ошибки регулирования с выхода блока сравнения поступает на вход дифференциатора 6, в котором формируется производная X от ошибки регулирования. Этот сигнал поступает на вход ограничителя 7, выходной сигнал которого равен:
х при |х | А X -А при х А
-А при х -А
(1)
Полученный сигнал X умножают в первом умножителе 8 на сигнал модуля ошибки регулирования, полученный в блоке 9 выделения модуля, и формируют на выходе первого умножителя 8 сигнал
Zt IxlX,
(2)
В функциональном задатчике 10 уровня ограничения формируют сигнал уровня ограничения производной о
А Ф(х),(3)
в частном случае А Вх.
В делителе 11 получают сигнал, обратный сигналу А, а во втором умножителе 12 перемножают выходные сигналы делителя и первого умножителя, формируя сигнал
Z, IxIX/A.
СО
Полученный сигнал Z2 и сигнал ошибки регулирования х суммируют на сумматоре 13, выходной сигнал которого
у х + |х|Х/А
(5)
подают на вход регулятора 1А, который формирует сигнал управления у и в качестве которого может быть использован, напцимер Т-регулятор.
Выходной сигнал U регулятора И преобразуется исполнительным устрой- . ством 15 в сигнал W, который действует на объект 1 регулирования.
За счет отличительных особенностей выполнения нелинейного корректирующего устройства система приобретает новое свойство, состоящее в изменении закона регулирования в зависимости от функциональной связи ошибки регулирования и ее производной. При движении системы к положению равновесия модуль ошибки регулирования, при котором осуществляют разрыв управления, увеличивается с увеличением модуля скорости движения.
При движении системы от положения равновесия коэффициент усиления нелинейного корректирующего устройства вначале равен двум, а затем при больших отклонениях по закону, зависящему от вида функции (3), становит- ( ся равным единице, что снижает перерегулирование объектов с запаздыванием.
Формула изобретения
Нелинейное корректирующее устройство, содержащее сумматор, соединенный первым входом с входами блока выделения модуля и дифференциатора, подключенного через ограничитель к первому входу первого умножителя,
0
5
к второму входу которого подключен выход блока выделения модуля, о т - личающееся тем, что, с целью повышения точности устройства, в него введены делитель, второй ум- ножитель и функциональный задатчик уровня ограничения, соединенный входом с первым входом сумматора, а выходом с управляющим входом ограничителя и входом делителя, второй умножитель соединен первым и вторым входами соответственно с выходом первого умножителя и выходом делителя, а выходом - с вторым входом сумматора,
| Нелинейные корректирующие устройства в системах автоматического регулирования | |||
| / Под ред | |||
| Ю.И.Тол- чиева | |||
| - М.: Машиностроение, 1971 | |||
| Нелинейное корректирующее устройство | 1987 |
|
SU1481706A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ( НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | |||
