I
Изобретение относится к средствам коррекции систем автоматического управления и может найти применение в химической, металлургической, угольной промышленности, а. также в промышленности строительных материалов и производства минеральных удобрений, .например, при обогащении руды на горно-обогатительных фабриках.
Цель изобретения - повышение качества регулирования устройства.
На фиг.1 показана блок-схема устройства в составе системы регулирования; на фиг.2 - временные диаграммы, проясняющие принцип действия устройства и его влияния на систему.
. Устройство содержит объект I регулирования с запаздыванием, датчик 2, задатчик З, блок 4 сравнения, дифференциатор 5, ограничитель 6, умножитель 7, блок 8 выделения модуля, сумматор 9, регулирующий блок 10 и исполнительное устройство И, .нелинейное корректирующее устройство 12.
На фиг.1 и 2 приняты обозначения: х - сигнал ошибки регулирования; х -, выходной сигнал дифференциатора 5; t %. - выходной сигнал ограничителя 6; Z - выходной сигнал умножителя 7; Y - выходной сигнал сумматора 9; U - выходной сигнал регулирующего блока; W - выходной сигнал исполнительного
Јь
х
4
О 3
31481706
устройства; р- коэффициент передачи ограничителя 6„,
Нелинейное корректирующее устройство в составе системы работает еле- , дующим образом.
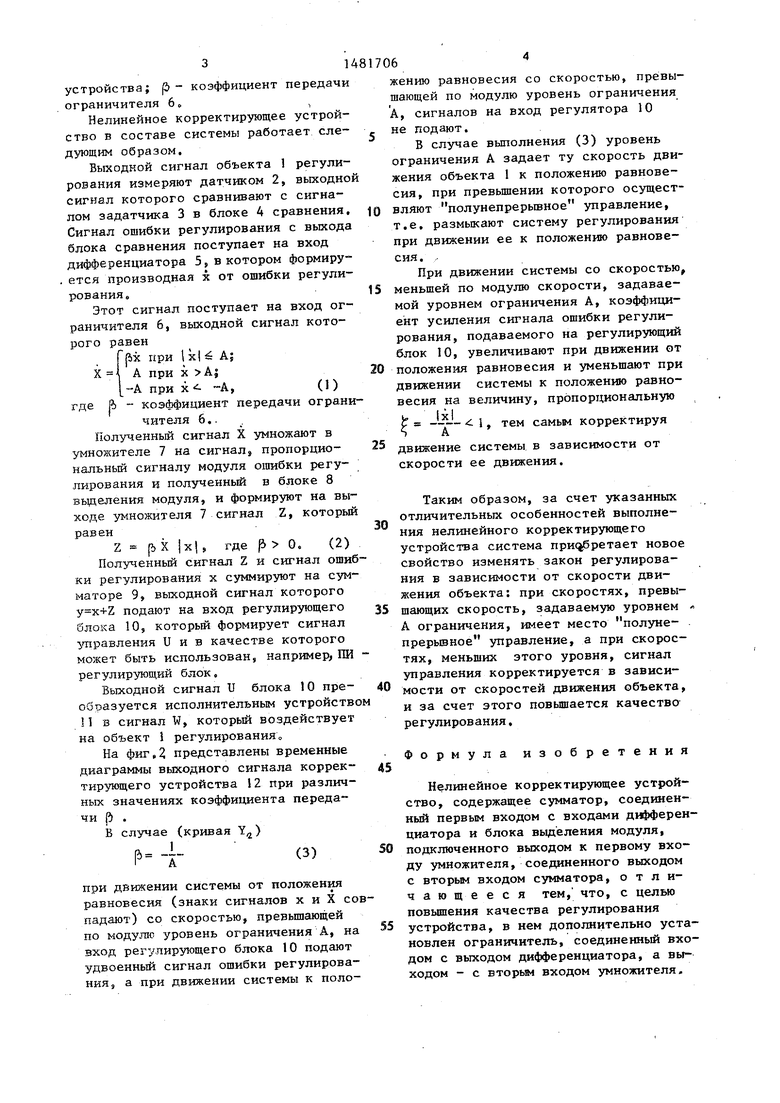
Выходкой сигнал объекта 1 регулирования измеряют датчиком 2, выходной сигнал которого сравнивают с сигналом задатчика 3 в блоке 4 сравнения, ю Сигнал ошибки регулирования с выхода блока сравнения поступает на вход дифференциатора 5, в котором формиру- ется производная х от ошибки регулирования ,15
Этот сигнал поступает на вход ограничителя 6, выходной сигнал которого равен
(|ix при Ixl i A; А при х А;20
-А при А, (1) где ft - коэффициент передачи ограничителя 6.
Полученный сигнал X умножают в умножителе 7 на сигнал пропорциональный сигналу модуля ошибки регулирования и полученный в блоке 8 выделения модуля, и формируют на выходе умножителя 7 сигнал Z, который равен
Z р X |х| , где (5 0. (2)
Полученный сигнал Z и сигнал ошибки регулирования х суммируют на сумматоре 9, выходной сигнал которого подают на вход регулирующего блока 10, который формирует сигнал управления U и в качестве которого может быть использован, например, ПИ - регулирующий блок,
Выходной сигнал U блока 10 преобразуется исполнительным устройством 11 в сигнал W, который воздействует на объект 1 регулирования
На фиг,2 представлены временные диаграммы выходного сигнала корректирующего устройства 12 при различных значениях коэффициента передачи р .
В случае (кривая Y2)
р. -I-(3)
при движении системы от положения равновесия (знаки сигналов х и X совпадают) со скоростью, превышающей по модулю уровень ограничения А, на вход регулирующего блока 10 подают удвоенный сигнал ошибки регулирования, а при движении системы к поло25
30
35
40
45
50
55
же ша А не
ог ж си вл т п с
м м ен р бл п дв в
д ск
о н у с н ш А п т м р
с н п д с ч п
5
0
5
0
5
0
5
0
5
жению равновесия со скоростью, превышающей по модулю уровень ограничения А, сигналов на вход регулятора 10 не подают.
В случае выполнения (3) уровень ограничения А задает ту скорость движения объекта 1 к положению равновесия, при превышении которого осуществляют полунепрерывное управление, т.е. размыкают систему регулирования при движении ее к положению равновесия.
При движении системы со скороетью, меньшей по модулю скорости, задаваемой уровнем ограничения А, коэффициент усиления сигнала ошибки регулирования, подаваемого на регулирующий блок 10, увеличивают при движении от положения равновесия и уменьшают при движении системы к положению равновесия на величину, пропорциональную 1x1
у (XI ,
тем самым корректируя
движение системы в зависимости от скорости ее движения.
Таким образом, за счет указанных отличительных особенностей выполнения нелинейного корректирующего устройства система приобретает новое свойство изменять закон регулирования в зависимости от скорости движения объекта: при скоростях, превышающих скорость, задаваемую уровнем - А ограничения, имеет место полунепрерывное управление, а при скоростях, меньших этого уровня, сигнал управления корректируется в зависимости от скоростей движения объекта, и за счет этого повышается качество регулирования,
Формула изобретения
Нелинейное корректирующее устройство, содержащее сумматор, соединенный первым входом с входами дифференциатора и блока выделения модуля, подключенного выходом к первому входу умножителя, соединенного выходом с вторым входом сумматора, отличающееся тем, что, с целью повышения качества регулирования устройства, в нем дополнительно установлен ограничитель, соединенный входом с выходом дифференциатора, а выходом - с вторым входом умножителя.
,
J
&
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1988 |
|
SU1582178A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Система управления окомкованием железорудного сырья | 1989 |
|
SU1654626A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Бинарная система управления | 1988 |
|
SU1580319A1 |
| Система управления | 1978 |
|
SU697974A1 |
| СПОСОБ ЛОГИЧЕСКОГО УПРАВЛЕНИЯ СЛОЖНЫМ МНОГОСВЯЗНЫМ ДИНАМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2574841C1 |

Изобретение относится к средствам коррекции систем автоматического управления и может найти применение в химической, металлургической, угольной промышленности, а также в промышленности строительных материалов и производства минеральных удобрений, например, при обогащении руды на горнообогатительных фабриках. Целью изобретения является повышение качества регулирования устройства. Для этого сигнал ошибки регулирования дифференцируется, ограничивается и умножается на модуль сигнала ошибки регулирования. Результат произведения суммируется с сигналом ошибки регулирования. 2 ил.
| 0 |
|
SU409122A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 289392, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| /Иод редо Ю.И.Топчеева | |||
| М.: Машиностроение, 1971, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
