Изобретение относится к автоматическим устройствам для измерения влажности дисперсных материалов, например хлопка-сырца, хлопковых семян, жмыха шрота и прочее, транспортируемых в трубопроводах.
Целью изобретения является повышение точности измерения влажности путем стабилизации уплотнения матери. ала.
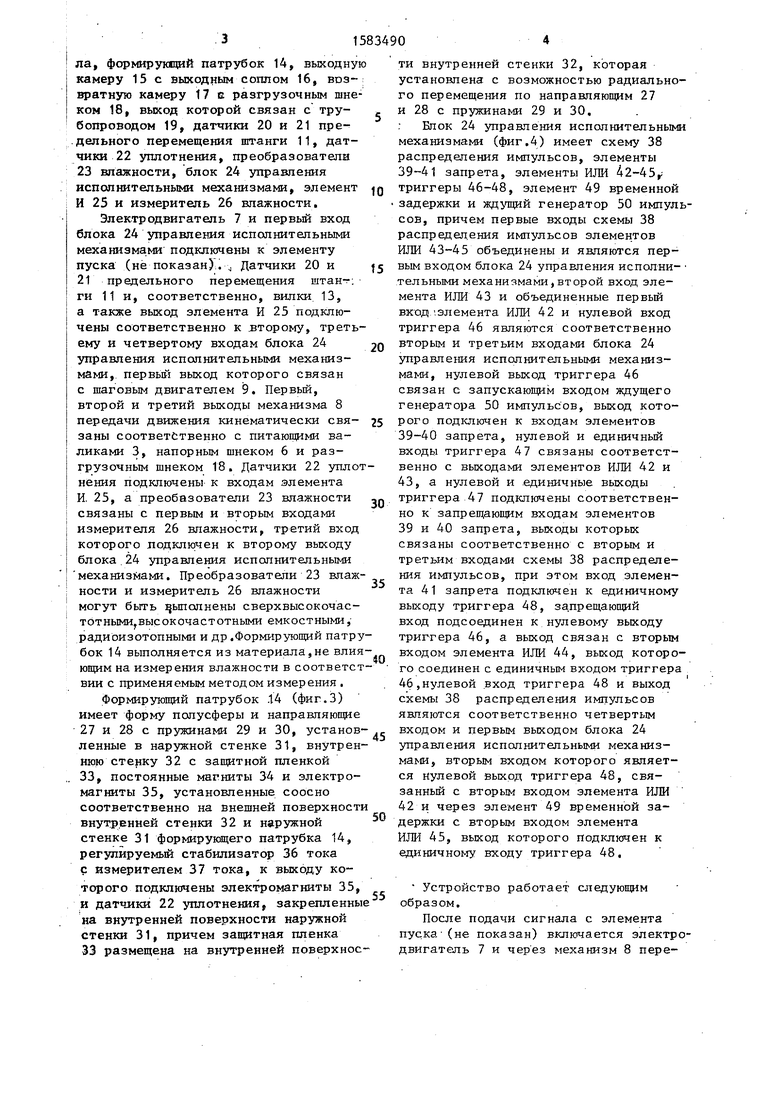
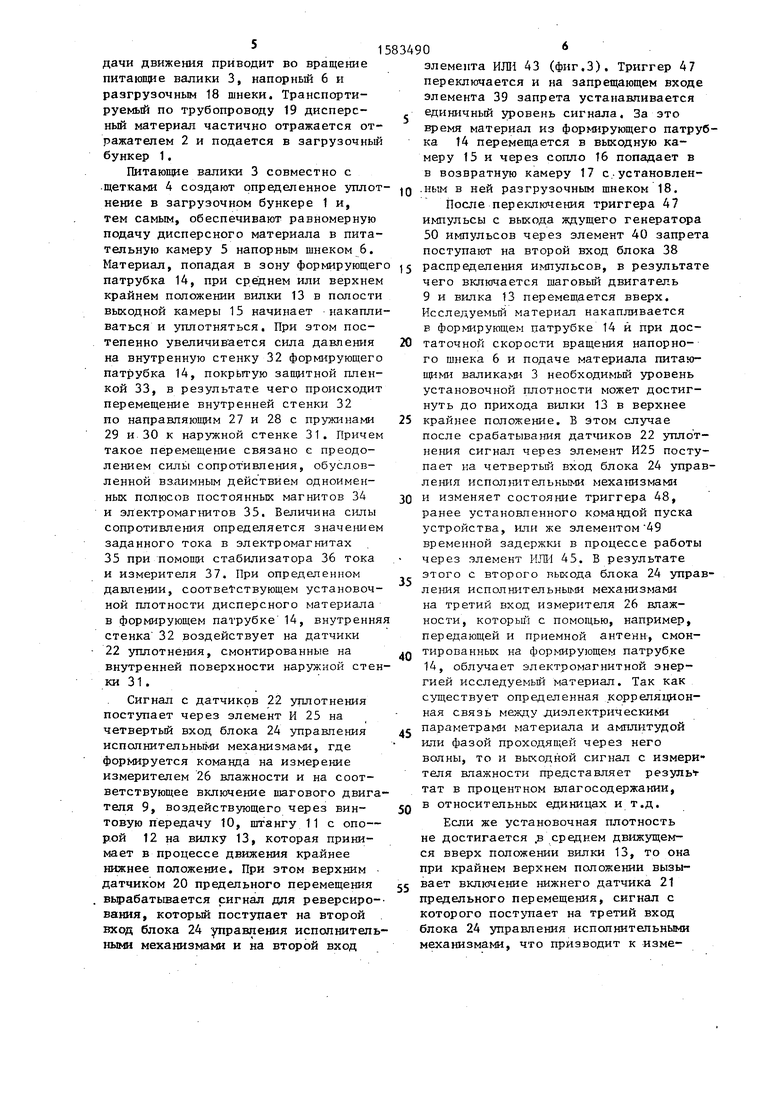
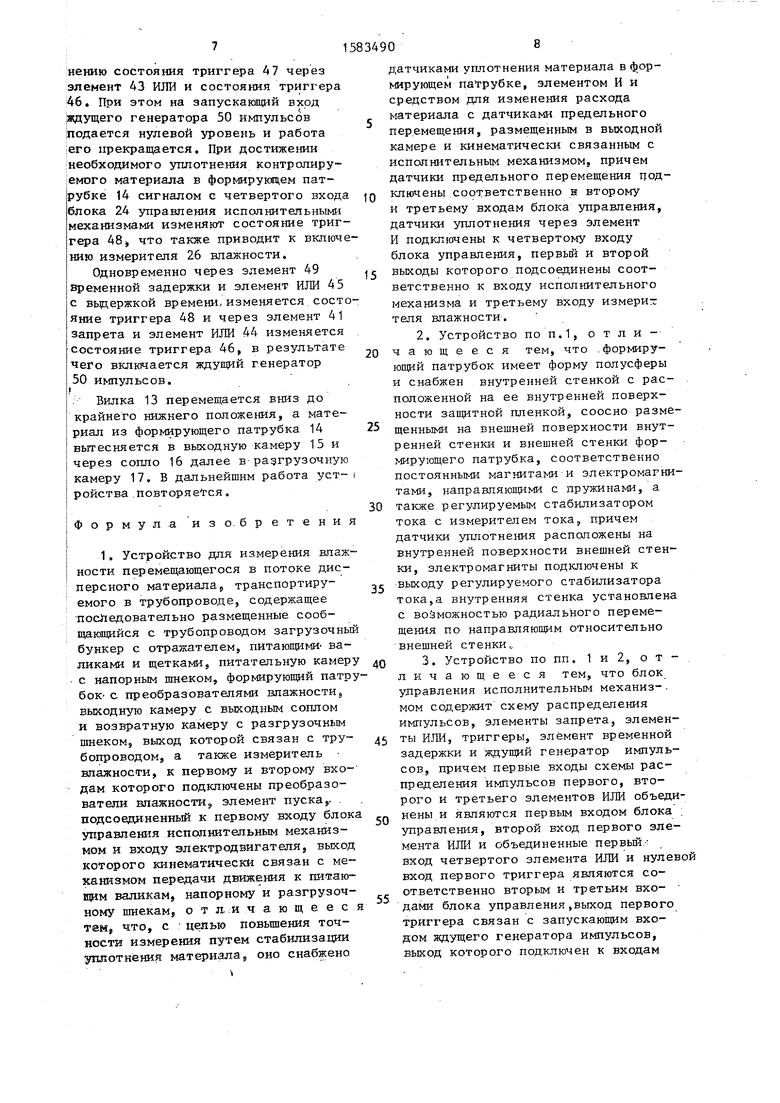
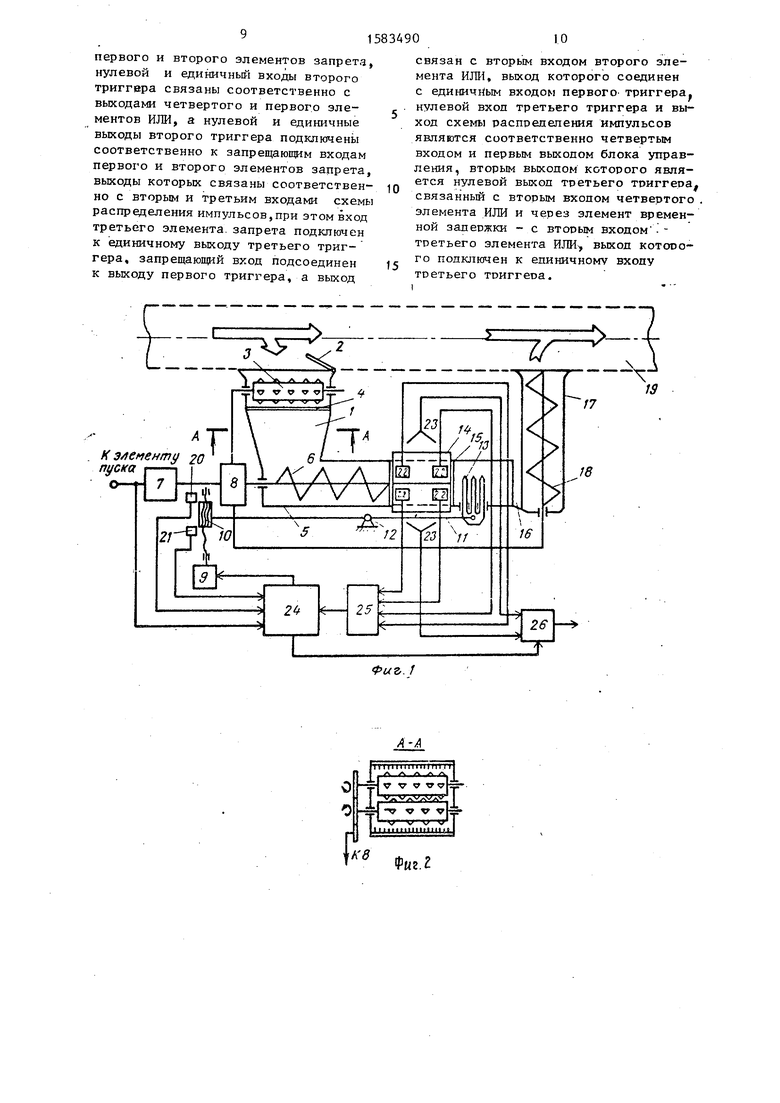
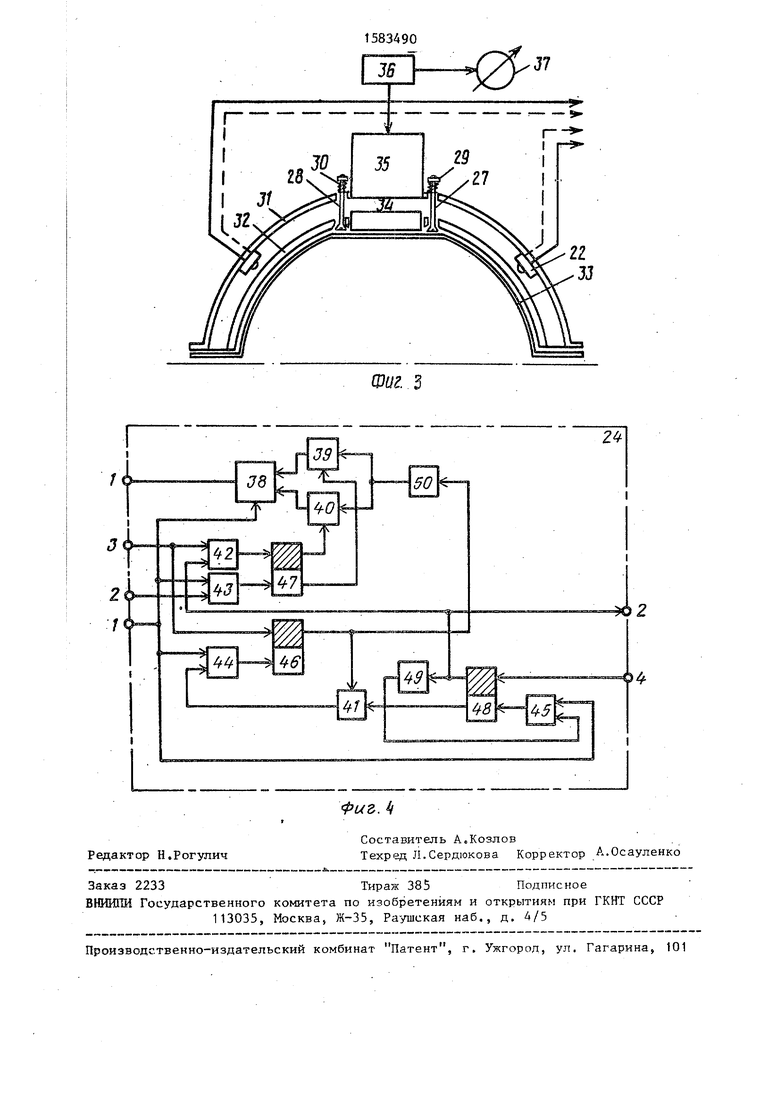
На фиг.1 представлена принципиальная схема устройства; на фиг.2 - разрез А-А на фиг.1;.на фиг.З - формирующий патрубок; на фиг.4 схема блока управления исполнительными механизмами.
Устройство (фиг.1) содержит за- Ърузочный бункер 1 с последовательно расположенными отражателем 2, питающими валиками 3 и щетками 4, питательную камеру 5 с напорным шнеком 6, электродвигатель 7, кинематически связанный с механизмом 8 передачи движения, шаговый двигатель 9, кинематически связанный посредством винтовой передачи 10 и штанги 11 с опорой 12 с вилкой 13, являющейся средством для изменения расхода материаел
00 СлЭ Ј СО
па, формирующий патрубок 14, выходную камеру 15 с выходным соплом 16,, возвратную камеру 17 Е разгрузочным шнеком 18, выход которой связан с тру- бопроводом 19, датчики 20 и 21 предельного перемещения штанги 11, датчики 22 уплотнения, преобразователи 23 влажности, блок 24 управления исполнительными механизмами, элемент И 25 и измеритель 26 влажности.
Электродвигатель 7 и первьй вход блока 24 управления исполнительными механизмами подключены к элементу пуска (не показан). „ Датчики 20 и
21 предельного перемещения штан-. ги 11 и, соответственно, вилки 13, а также выход элемента И 25 подключены соответственно к второму, третьему и четвертому входам блока 24 управления исполнительными механизмами, первый выход которого связан с шаговым двигателем 9. Первый, второй и третий выходы механизма 8 передачи движения кинематически свя- заны соответственно с питающими валиками 3, напорным шнеком 6 и разгрузочным шнеком 18. Датчики 22 уплотнения подключены к входам элемента И 25, а преобазователи 23 влажности связаны с первым и вторым входами измерителя 26 влажности, третий вход которого подключен к второму выходу блока 24 управления исполнительными механизмами. Преобразователи 23 влажности и измеритель 26 влажности могут быть в,ыполнены сверхвысокочас- тотными высокочастотными емкостными, радиоизотопными и др .Формирующий патрубок 14 выполняется из материала,не влияющим на измерения влажности в соответствии с применяемым методом измерения . Формирующий патрубок .14 (фиг.З) имеет форму полусферы и направляющие 27 и 28 с пружинами 29 и 30, установ- ленные в наружной стенке 31, внутреннюю стенку 32 с защитной пленкой 33, постоянные магниты 34 и электромагниты 35, установленные соосно соответственно на внешней поверхности внутренней стенки 32 и наружной стенке 31 формирующего патрубка 14, регулируемый стабилизатор 36 тока с измерителем 37 тока, к выходу которого подключены электромагниты 35, и датчики 22 уплотнения, закрепленные на внутренней поверхности наружной стенки 31, причем защитная пленка 33 размещена на внутренней поверхнос
5
0 5 « ,.
5
0
5
ти внутренней стенки 32, которая установлена с возможностью радиального перемещения по направляющим 27 и 28 с пружинами 29 и 30.
Блок 24 управления исполнительными механизмами (фиг.4) имеет схему 38 распределения импульсов, элементы 39-41 запрета, элементы ИЛИ 42-45г триггеры 46-48, элемент 49 временной задержки и ждущий генератор 50 импульсов, причем первые входы схемы 38 распределения импульсов элементов ИЛИ 43-45 объединены и являются первым входом блока 24 управления исполни- тельными механизмами, второй вход элемента ИЛИ 43 и объединенные первый вход элемента ИЛИ 42 и нулевой вход триггера 46 являются соответственно вторым и третьим входами блока 24 управления исполнительными механизмами, нулевой выход триггера 46 связан с запускающим входом ждущего генератора 50 импульсов, выход которого подключен к входам элементов 39-40 запрета, нулевой и единичный входы триггера 47 связаны соответственно с выходами элементов ИЛИ 42 и 43, а нулевой и единичные выходы триггера 47 подключены соответственно к запрещающим входам элементов 39 и 40 запрета, выходы которых связаны соответственно с вторым и третьим входами схемы 38 распределения импульсов, при этом вход элемента 4 1 запрета подключен к единичному выходу триггера 48, запрещающий вход подсоединен к нулевому выходу триггера 46, а выход связан с вторым входом элемента ИЛИ 44, выход которого соединен с единичным входом триггера 46,нулевой вход триггера 48 и выход схемы 38 распределения импульсов являются соответственно четвертым входом и первым выходом блока 24 управления исполнительными механизмами, вторым входом которого является нулевой выход триггера 48, связанный с вторым входом элемента ИЛИ 42 и через элемент 49 временной задержки с вторым входом элемента ИЛИ 45, выход которого подключен к единичному входу триггера 48.
Устройство работает следующим образом.
После подачи сигнала с элемента пуска (не показан) включается электродвигатель 7 и через механизм 8 передачи движения приводит во вращение питающие валики 3, напорный 6 и разгрузочным 18 шнеки. Транспортируемый по трубопроводу 19 дисперсный материал частично отражается отражателем 2 и подается в загрузочный бункер 1.
Питающие валики 3 совместно с щетками 4 создают определенное уплотнение в загрузочном бункере 1 и, тем самым, обеспечивают равномерную подачу дисперсного материала в питательную камеру 5 напорным шнеком 6.
20
25
Материал, попадая в зону формирующего распределения импульсов, в результате патрубка 14, при среднем или верхнем чего включается шаговый двигатель крайнем положении вилки 13 в полости выходной камеры 15 начинает накапливаться и уплотняться. При этом постепенно увеличивается сила давления на внутренную стенку 32 формирующего патрубка 14, покрытую защитной пленкой 33, в результате чего происходит перемещение внутренней стенки 32 по направляющим 27 и 28 с пружинами 29 и 30 к наружной стенке 31. Причем такое перемещение связано с преодолением силы сопротивления, обусловленной взаимным действием одноименных полюсов постоянных магнитов 34 и электромагнитов 35. Величина силы сопротивления определяется значением заданного тока в электромагнитах 35 при помощи стабилизатора 36 тока и измерителя 37. При определенном давлении, соответствующем установочной плотности дисперсного материала в формирующем патрубке 14, внутренняя стенка 32 воздействует на датчики
40
30
35
22 уплотнения, смонтированные на внутренней поверхности наружной стенки 31 .
Сигнал с датчиков 22 уплотнения поступает через элемент И 25 на четвертый вход блока 24 управления исполнительными механизмами, где формируется команда на измерение измерителем 26 влажности и на соответствующее включение шагового двигателя 9, воздействующего через винтовую передачу 10, штангу 11 с опо- рой 12 на вилку 13, которая принимает в процессе движения крайнее нижнее положение. При этом верхним датчиком 20 предельного перемещения . вырабатывается сигнал для реверсиро-- вания, который поступает на второй вход блока 24 управления исполнительными механизмами и на второй вход
9 и вилка 13 перемешается вверх. Исследуемый материал накапливается в формирующем патрубке 14 и при достаточной скорости вращения напорного шнека 6 и подаче материала питающими валиками 3 необходимый уровень установочной плотности может достигнуть до прихода вилки 13 в верхнее крайнее положение. В этом случае после срабатывания датчиков 22 уплотнения сигнал через элемент И25 поступает на четвертый вход блока 24 управления исполнительными механизмами и изменяет состояние триггера 48, ранее установленного командой пуска устройства, или же элементом 49 временной задержки в процессе работы через элемент ИЛИ 45. В результате этого с второго выхода блока 24 управления исполнительными механизмами на третий вход измерителя 26 влажности, который с помощью, например, передающей и приемной антенн, смонтированных на формирующем патрубке 14, облучает электромагнитной энергией исследуемый материал. Так как существует определенная корреляционная связь между диэлектрическими параметрами материала и амплитудой или фазой проходящей через него волны, то и выходной сигнал с измерителя влажности представляет результ тат в процентном влагосодержании, в относительных единицах и т.д.
Если же установочная плотность не достигается .в среднем движущемся вверх положении вилки 13, то она при крайнем верхнем положении вызы- 55 вает включение нижнего датчика 21 предельного перемещения, сигнал с которого поступает на третий вход блока 24 управления исполнительными механизмами, что приэводит к изме45
50
5834906
элемента ИЛИ 43 (фиг.З). Триггер 47 переключается и на запрещающем входе элемента 39 запрета устанавливается , единичный уровень сигнала. За это
время материал из формирующего патрубка 14 перемещается в выходную камеру 15 и через сопло 16 попадает в в возвратную камеру 17 сустановлен- jg ным в ней разгрузочным шнеком 18. После переключения триггера 47 импульсы с выхода ждущего генератора 50 импульсов через элемент 40 запрета поступают на второй вход блока 38
0
5
распределения импульсов, в результате чего включается шаговый двигатель
0
0
5
9 и вилка 13 перемешается вверх. Исследуемый материал накапливается в формирующем патрубке 14 и при достаточной скорости вращения напорного шнека 6 и подаче материала питающими валиками 3 необходимый уровень установочной плотности может достигнуть до прихода вилки 13 в верхнее крайнее положение. В этом случае после срабатывания датчиков 22 уплотнения сигнал через элемент И25 поступает на четвертый вход блока 24 управления исполнительными механизмами и изменяет состояние триггера 48, ранее установленного командой пуска устройства, или же элементом 49 временной задержки в процессе работы через элемент ИЛИ 45. В результате этого с второго выхода блока 24 управления исполнительными механизмами на третий вход измерителя 26 влажности, который с помощью, например, передающей и приемной антенн, смонтированных на формирующем патрубке 14, облучает электромагнитной энергией исследуемый материал. Так как существует определенная корреляционная связь между диэлектрическими параметрами материала и амплитудой или фазой проходящей через него волны, то и выходной сигнал с измерителя влажности представляет результ тат в процентном влагосодержании, в относительных единицах и т.д.
Если же установочная плотность не достигается .в среднем движущемся вверх положении вилки 13, то она при крайнем верхнем положении вызы- 5 вает включение нижнего датчика 21 предельного перемещения, сигнал с которого поступает на третий вход блока 24 управления исполнительными механизмами, что приэводит к изме5
0
нению состояния триггера 47 через элемент 43 ИЛИ и состояния триггера 46. При этом на запускающий вход ждущего генератора 50 импульсов подается нулевой уровень и работа его прекращается. При достижении необходимого уплотнения контролируемого материала в формирующем патрубке 14 сигналом с четвертого входа блока 24 управления исполнительными механизмами изменяют состояние триггера 48, что также приводит к включению измерителя 26 влажности.
Одновременно через элемент 49 временной задержки и элемент ИЛИ 45 с выдержкой времени, изменяется состояние триггера 48 и через элемент 41 запрета и элемент ИЛИ 44 изменяется состояние триггера 46, в результате чего включается ждущий генератор 50 импульсов.
Вилка 13 перемещается вниз до крайнего нижнего положения, а материал из формирующего патрубка 14 вытесняется в выходную камеру 15 и через сопло 16 далее в разгрузочную камеру 17. В дальнейшим работа устройства повторяется.
Формула изобретения
1. Устройство для измерения влажности перемещающегося в потоке дисперсного материала5 транспортируемого в трубопроводе, содержащее последовательно размещенные сообщающийся с трубопроводом загрузочный бункер с отражателем, питающими- валиками и щетками, питательную камеру с напорным шнеком, формирующий патру бок с преобразователями влажности, выходную камеру с выходным соплом и возвратную камеру с разгрузочным шнеком, выход которой связан с трубопроводом, а также измеритель влажности, к первому и второму входам которого подключены преобразователи влажности,, элемент пуска, подсоединенный к первому входу блока управления исполнительным механизмом и входу электродвигателя, выход которого кинематически связан с механизмом передачи ДВИЖЕНИЯ к питающим валикам, напорному и разгрузочному шнекам, отличающееся тем, что, с цепью повышения точности измерения путем стабилизации уплотнения материала,, оно снабжено
датчиками уплотнения материала в формирующем патрубке, элементом И и средством для изменения расхода материала с датчиками предельного перемещения, размещенным в выходной камере и кинематически связанным с исполнительным механизмом, причем датчики предельного перемещения подключены соответственно в второму и третьему входам блока управления, датчики уплотнения через элемент И подключены к четвертому входу блока управления, первый и второй
5 выходы которого подсоединены соответственно к входу исполнительного механизма и третьему входу измерит теля влажности.
2. Устройство по п.1, о т л и 0 чающееся тем, что формирующий патрубок имеет форму полусферы и снабжен внутренней стенкой с расположенной на ее внутренней поверхности защитной пленкой, соосно разме5 щенными на внешней поверхности внутренней стенки и внешней стенки формирующего патрубка, соответственно постоянными магнитами и электромагнитами, направляющими с пружинами, а
0 также регулируемым стабилизатором тока с измерителем тока, причем датчики уплотнения расположены на внутренней поверхности внешней стенки, электромагниты подключены к
t выходу регулируемого стабилизатора внутренняя стенка установлена с возможностью радиального перемещения по направляющим относительно внешней стенки
Q3. Устройство по пп. 1 и 2, о т л i чающееся тем, что блок управления исполнительным механизмом содержит схему распределения импульсов, элементы запрета, элемен5 ты ИЛИ, триггеры, элемент временной задержки и ждущий генератор импульсов, причем первые входы схемы распределения импульсов первого, второго и третьего элементов ИЛИ объедип нены и являются первым входом блока управления, второй вход первого элемента ИЛИ и объединенные первый вход четвертого элемента ИЛИ и нулевой вход первого триггера являются соответственно вторым и третьим входами блока управления,выход первого триггера связан с запускающим входом ждущего генератора импульсов, выход которого подключен к входам
5
Г
К элементу 20 пуска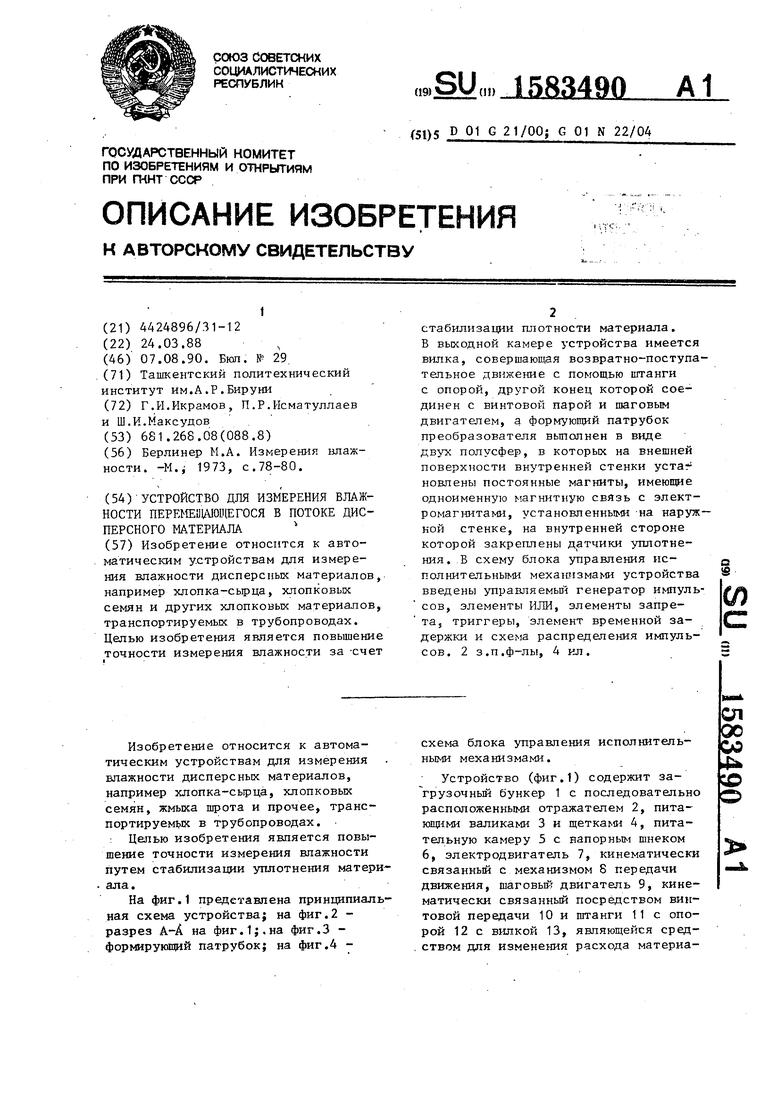
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования процесса обработки дисперсного материала в потоке | 1987 |
|
SU1571484A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЛАЖНОСТИ СЫПУЧИХ МАТЕРИАЛОВ | 2008 |
|
RU2394232C2 |
| Способ сушки семян и устройство для его осуществления | 2019 |
|
RU2726108C1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Протравливатель семян | 1988 |
|
SU1627102A2 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| Устройство для регулирования давления | 1986 |
|
SU1409987A2 |
| Система для автоматического регулирования режима работы машин виброударного действия | 1976 |
|
SU633985A1 |
Изобретение относится к автоматическим устройствам для измерения влажности дисперсных материалов, например хлопка-сырца, хлопковых семян и других хлопковых материалов, транспортируемым в трубопроводах. Целью изобретения является повышение точности измерения влажности за счет стабилизации плотности материала. В выходной камере устройства имеется вилка, совершающая возвратно-поступательное движение с помощью штанги с опорой, другой конец которой соединен с винтовой парой и шаговым двигателем, а формующий патрубок преобразователя выполнен в виде двух полусфер, в которых на внешней поверхности внутренней стенки установлены постоянные магниты, имеющие одноименную магнитную связь с электромагнитами, установленными на наружной стенке, на внутренней стороне которой закреплены датчики уплотнения. В схему блока управления исполнительными механизмами устройства введены управляемый генератор импульсов, элементы ИЛИ, элементы запрета, триггеры, элемент временной задержки и схема распределения импульсов. 2 з.п.ф-лы, 3 ил.
Фиъ 1
Фиг 2
J7
Фиг. 5
| Берлинер М.А | |||
| Измерения влажности | |||
| -М., 1973, с.78-80. |
