Изобретение относится к электротехнике, а конкретно к электрическому приводу переменного тока, и может быть использовано в электромеханических системах на производстве, на транспорте и строительстве.
Известен бесконтактный регулируемый электропривод, содержащий двухфазный синхронный электродвигатель, двухфазный синхронный тахогенератор, датчик положения ротора в виде синусно-косинусного вращающегося трансформатора, два фазочувствительных выпрямителя, два суммирующих усилителя, источник входного сигнала и два инерционных звена [Микеров А.Г. Бесконтактный регулируемый электропривод. Авторское свидетельство СССР №1075344, H02P 5/34, 23.02.1984. Бюл. №7].
Его недостатком является наличие датчика положения ротора и тахогенератора, что усложняет конструкцию и снижает надежность.
Наиболее близким по технической сущности и составу элементов является вентильный электропривод, содержащий синхронный двигатель с трехфазной обмоткой статора и ротор-индуктор с возбуждением от постоянных магнитов, преобразователь частоты, датчик токов статора, четыре преобразователя координат, три сумматора, вычислитель токов, вычислитель угла и частоты вращения, регулятор частоты вращения и два регулятора тока [Сизякин А., Румянцев М. Без датчика положения ротора: решения компании IR для управления вентильными двигателями. Журнал Новости электроники, 2011, №10. Система iMotion компании International Rectifier]. Недостатком этого электропривода является наличие интеграторов в вычислителе угла и частоты вращения, что снижает точность работы электропривода.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении точности регулирования частоты вращения.
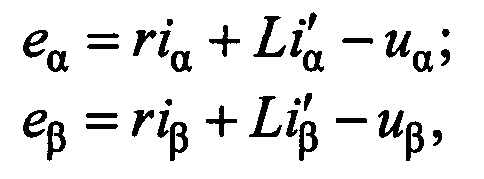
Технический результат достигается тем, что в вентильный электропривод, содержащий синхронный двигатель с трехфазной обмоткой статора и ротором-индуктором с возбуждением от постоянных магнитов, преобразователь частоты, датчик токов статора, четыре преобразователя координат, три сумматора, вычислитель токов, вычислитель угла и частоты вращения, регулятор частоты вращения и два регулятора тока, входным является сигнал, пропорциональный требуемой частоте вращения и поступающий на первый вход первого сумматора, второй инвертирующий вход которого подключен ко второму выходу вычислителя угла и частоты вращения, а выход подключен к регулятору частоты вращения, выход которого подключен к первому входу вычислителя токов, второй вход которого соединен с вторым выходом вычислителя угла и частоты вращения, а первый, второй выходы подключены к первым входам второго, третьего сумматоров, вторые инвертирующие входы которых подключены к первому, второму выходам второго преобразователя координат, а выходы подключены к входам первого, второго регуляторов тока, выходы которых подключены к первому, второму входам третьего преобразователя координат, выходы которого подключены к первому, второму входам четвертого преобразователя координат, первый - третий выходы которого подключены к первому - третьему входам преобразователя частоты, выходы которого подключены к зажимам обмотки статора через датчик токов, первый - третий выходы которого подключены к первому - третьему входам первого преобразователя координат, первый, второй выходы которого подключены к первому, второму входам второго преобразователя координат, а первый выход вычислителя угла и частоты вращения подключен к третьим входам второго, третьего преобразователей координат, введены первый, второй вычислители ЭДС вращения и первый, второй дифференциаторы, входы которых подключены к первому, второму выходам первого преобразователя координат, а выходы подключены к третьим входам первого, второго вычислителей ЭДС вращения, первые входы которых соединены с первым, вторым выходами третьего преобразователя координат, вторые входы соединены с первым, вторым выходами первого преобразователя координат, а выходы подключены к первому, второму входам вычислителя угла и частоты вращения, причем вычислители ЭДС реализуют зависимости
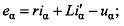

а вычислитель угла и частоты вращения реализует зависимости
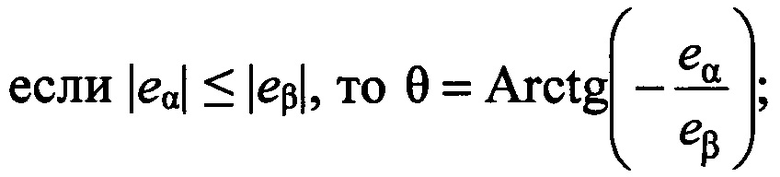
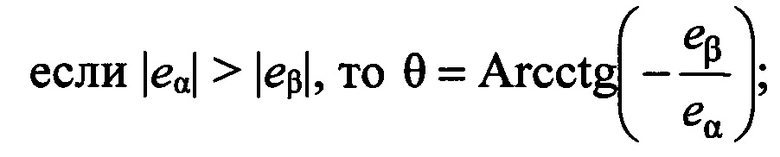


где r, L - активное сопротивление и индуктивность эквивалентной двухфазной обмотки; Ψ0 - потокосцепление сосной фазы с ротором-индуктором; заглавные буквы у функций Arctg и Arcctg означают определение угла с учетом номера четверти по знакам ЭДС еα и еβ.
Сущность технического решения поясняется на функциональной схеме по фиг. 1. Здесь 1-3 - фазы обмотки статора синхронного двигателя; 4 - ротор-индуктор; 5 - преобразователь частоты; 6 - датчик токов статора; 7-10 - преобразователи координат; 11-13 - сумматоры; 14 - регулятор частоты вращения; 15, 16 - регуляторы тока; 17, 18 - дифференциаторы; 19 - вычислитель токов; 20, 21 - вычислители ЭДС вращения; 22 - вычислитель угла и частоты вращения.
Входным является сигнал ω0, пропорциональный требуемой частоте вращения и поступающий на первый вход первого сумматора 11, второй инвертирующий вход которого подключен к второму выходу вычислителя 22 угла и частоты вращения, а выход подключен к регулятору 14 частоты вращения, выход которого подключен к первому входу вычислителя 19 токов, второй вход которого соединен с вторым выходом вычислителя 22 угла и частоты вращения, а первый, второй выходы подключены к первым входам второго 12, третьего 13 сумматоров, вторые инвертирующие входы которых подключены к первому, второму выходам второго преобразователя 8 координат, а выходы подключены к входам первого 15, второго 16 регуляторов тока, выходы которых подключены к первому, второму входам третьего преобразователя 9 координат, выходы которого подключены к первому, второму входам четвертого преобразователя 10 координат, первый - третий выходы которого подключены к первому - третьему входам преобразователя 5 частоты, выходы которого подключены к зажимам обмотки статора через датчик 6 токов, первый - третий выходы которого подключены к первому - третьему входам первого преобразователя 7 координат, первый, второй выходы которого подключены к первому, второму входам второго преобразователя 8 координат, а первый выход вычислителя 22 угла и частоты вращения подключен к третьим входам второго 8, третьего 9 преобразователей координат, первый, второй выходы первого преобразователя 7 координат подключены к входам первого 17, второго 18 дифференциаторов, выходы которых подключены к третьим входам первого 20, второго 21 вычислителей ЭДС вращения, первые входы которых соединены с первым, вторым выходами третьего преобразователя 9 координат, вторые входы соединены с первым, вторым выходами первого преобразователя 7 координат, а выходы подключены к первому, второму входам вычислителя 22 угла и частоты вращения.
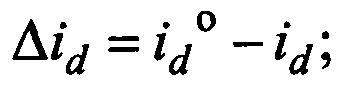
Вентильный электропривод работает следующим образом. Сумматор 11 вырабатывает погрешность по скорости
Δω=ω0-ω.
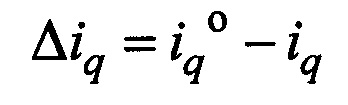
Она поступает на регулятор 14 частоты вращения, который вырабатывает значение требуемого момента Mo, поступающее на вход вычислителя 19 токов. На его второй вход поступает оценка частоты вращения ω, а на выходах формируются желаемые значения токов обобщенной машины  Эти сигналы поступают на первые входы сумматоров 12, 13, где они сравниваются с действительными токами обобщенной машины id, iq, приходящими с выходов второго преобразователя 8 координат. Погрешности по токам
Эти сигналы поступают на первые входы сумматоров 12, 13, где они сравниваются с действительными токами обобщенной машины id, iq, приходящими с выходов второго преобразователя 8 координат. Погрешности по токам
поступают на входы регуляторов 15, 16 тока. На их выходах формируются значения напряжений фаз статора обобщенной машины ud, uq, поступающие на входы преобразователя 9 координат. На его выходах формируются значения напряжений фаз статора двухфазной машины uα, uβ, поступающие на входы преобразователя 10 координат. На его выходах формируются значения напряжений фаз статора трехфазной машины uA, uB, uC, поступающие на входы преобразователя 5 частоты. На его выходах формируется трехфазная система напряжений, которые поступают на фазы 1-3 двигателя через датчик 6 токов. Его выходные сигналы iA, iB, iC поступают на входы первого преобразователя 7 координат. Его выходные сигналы - токи двухфазной машины iα, iβ - поступают на входы второго преобразователя 8 координат, а также на входы первого 17 и второго 18 дифференциатора. Они вырабатывают сигналы, пропорциональные производным от токов  согласно уравнениям
согласно уравнениям
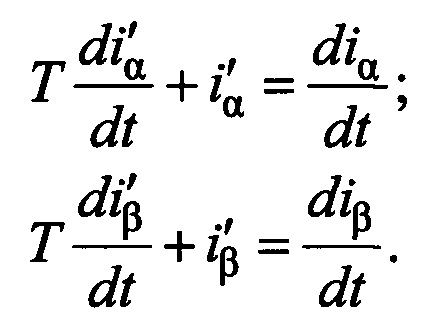
Здесь Т - постоянная времени.
Эти сигналы приходят на третьи входы первого 20 и второго 21 вычислителей ЭДС вращения. На их первые входы приходят сигналы напряжений двухфазной машины uα, uβ с выходов третьего преобразователя 9 координат, а на вторые входы - сигналы токов двухфазной машины iα, iβ с выходов первого преобразователя 7 координат. Вычислители 20, 21 ЭДС вращения вырабатывают сигналы eα, eβ согласно равенствам
поступающие на входы вычислителя 22 угла и частоты вращения. Он формирует сигналы угла θ и частоты вращения со согласно соотношениям:

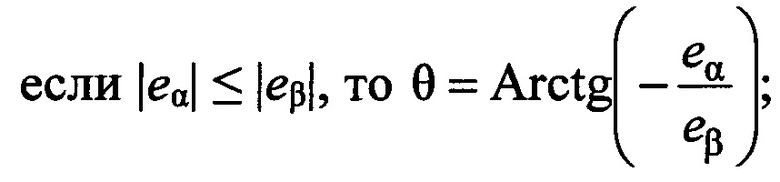


где заглавные буквы у функций Arctg и Arcctg означают определение угла с учетом номера четверти по знакам ЭДС eα и eβ.
Благодаря введению двух дифференциаторов и двух вычислителей ЭДС вращения, не содержащих интеграторов, получен вентильный электропривод с повышенной точностью поддержания частоты вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |

Изобретение относится к области электротехники и может быть использовано в электромеханических системах на производстве, на транспорте и строительстве. Технический результат заключается в повышении точности регулирования частоты вращения. Вентильный электропривод имеет синхронный двигатель с ротором-индуктором (4) и с фазами обмотки статора (1-3), подключенными к преобразователю частоты (5) через датчик 6 токов статора. Три его выхода подключены ко входам преобразователя (7) координат, выходы которого подключены к преобразователю координат (8), выходы которого подключены ко вторым инвертирующим входам сумматоров (12, 13), первые входы которых соединены с выхода-ми вычислителя токов (19), а выходы соединены со входами регуляторов тока (15, 16), выходы которых соединены со входами преобразователя координат 9, выходы которого соединены со входами преобразователя координат (10), три выхода которого соединены со входами преобразователя частоты (5). Входной сигнал ω0, пропорциональный требуемой частоте вращения, поступает на первый вход сумматора (11), второй инвертирующий вход которого соединен со вторым выходом вычислителя (22) угла и частоты вращения и вторым входом вычислителя токов (19), а выход подключен ко входу регулятора (14) частоты вращения, выход которого соединен с первым входом вычислителя (19) токов, а первый выход вычислителя (22) угла и частоты вращения соединен с третьими входами преобразователей координат (8, 9). Благодаря введению вычислителей (20, 21) ЭДС вращения и дифференциаторов (17, 18), входы которых соединены с выходами преобразователя 7 координат, а выходы соединены с третьими входами вычислителей (20, 21) ЭДС вращения, первые входы которых соединены с выходами преобразователя (9) координат, вторые входы соединены с выходами преобразователя (7) координат, а выходы соединены со входами вычислителя (22) угла и частоты вращения, получен вентильный электропривод с повышенной точностью регулирования частоты вращения. 1 ил.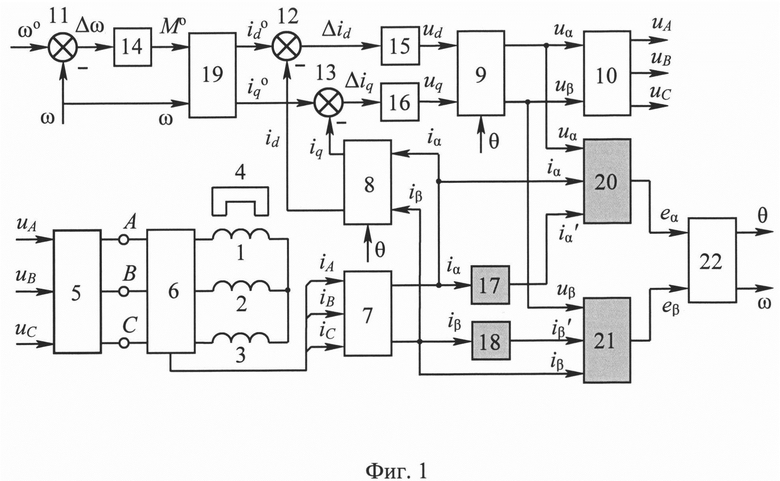
Вентильный электропривод, содержащий синхронный двигатель с трехфазной обмоткой статора и ротором-индуктором с возбуждением от постоянных магнитов, преобразователь частоты, датчик токов статора, четыре преобразователя координат, три сумматора, вычислитель токов, вычислитель угла и частоты вращения, регулятор частоты вращения и два регулятора тока, входным является сигнал, пропорциональный требуемой частоте вращения и поступающий на первый вход первого сумматора, второй инвертирующий вход которого подключен ко второму выходу вычислителя угла и частоты вращения, а выход подключен к регулятору частоты вращения, выход которого подключен к первому входу вычислителя токов, второй вход которого соединен с вторым выходом вычислителя угла и частоты вращения, а первый, второй выходы подключены к первым входам второго, третьего сумматоров, вторые инвертирующие входы которых подключены к первому, второму выходам второго преобразователя координат, а выходы подключены к входам первого, второго регуляторов тока, выходы которых подключены к первому, второму входам третьего преобразователя координат, выходы которого подключены к первому, второму входам четвертого преобразователя координат, первый-третий выходы которого подключены к первому-третьему входам преобразователя частоты, выходы которого подключены к зажимам обмотки статора через датчик токов, первый-третий выходы которого подключены к первому-третьему входам первого преобразователя координат, первый, второй выходы которого подключены к первому, второму входам второго преобразователя координат, а первый выход вычислителя угла и частоты вращения подключен к третьим входам второго, третьего преобразователей координат, отличающийся тем, что введены первый, второй вычислители ЭДС вращения и первый, второй дифференциаторы, входы которых подключены к первому, второму выходам первого преобразователя координат, а выходы подключены к третьим входам первого, второго вычислителей ЭДС вращения, первые входы которых соединены с первым, вторым выходами третьего преобразователя координат, вторые входы соединены с первым, вторым выходами первого преобразователя координат, а выходы подключены к первому, второму входам вычислителя угла и частоты вращения, причем вычислители ЭДС реализуют зависимости


а вычислитель угла и частоты вращения реализует зависимости
если |еα|≤|еβ|, то 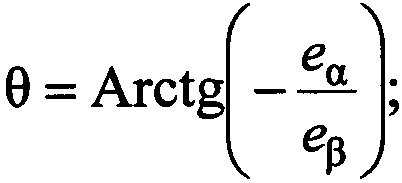
если |еα|>|еβ|, то 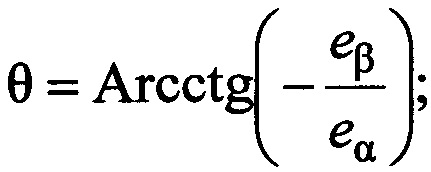
если |sinθ|≤|cosθ|, то 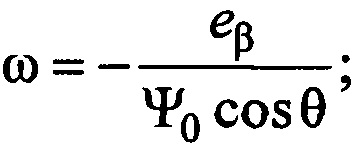
если |sinθ|>|cosθ|, то 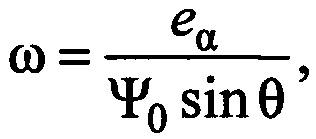
где r, L - активное сопротивление и индуктивность эквивалентной двухфазной обмотки; Ψ0 - потокосцепление сосной фазы с ротором-индуктором; заглавные буквы у функций Arctg и Arcctg означают определение угла с учетом номера четверти по знакам ЭДС еα и еβ.
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| СПОСОБ ПОЛУЧЕНИЯ ДЛИННОГО ЛЬНОВОЛОКНА | 2011 |
|
RU2465379C1 |
| JP 4480696 B2, 16.06.2010 | |||
| US 8174217 B2, 08.05.2012 | |||
| EP 2889999 A1, 01.07.2015 | |||
| WO 2013130286 A1, 06.09.2013. | |||

