первого интегратора через первый блок перемножения, второй вход которого соединен с блоком определения.частбты вращения, соединен со свободным зажимом резистора с параметром, эквивалентные активному сопротивлению ротора во второй фазе, выход второго интегратора через инвертор подключен к второму блоку перемножения, второй вход которого соединен с блоком оп- I ределения частоты вращения, а выход второго блока перемножения соединен со свббодньи зажимом резистора с па- ; раметрсм, эквивалентным активнсму
сопротивлению ротора в первой фазе, ;
выходы интеграторов подключены к бло-:
ку вычисления модуля потокосцепления, выход которого подключен к второму входу блока деления, к второму входу второго блока сравнения, к третьему входу преобразователя координат, общие точки резистора и дросселя с .параметрами, эквивалентными активному сопротивлению статора и индуктивности, через блок преобразования модуля то:ков каждой фазы соединены с вторыми входами первого и третьего блоков сравнения, с четвертым ипятым входа,ми преобразователя координат, ; шестой вход которого соединен с ВЫХОДОМ блока определения, частоту I
вращения
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
УСТРОЙСТВО ДЛЯУПРАВЛЕНР1Я АСИНХРОННЫМ ЧАСТОТНО-РЕГУЖРУЕМЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, содержащее инвертор напряжения,предназначенньш для подключения к электродвигателю, блок управления частотой и модулем напряжения инвертора напряжения, вход которого подключен к блоку формирования задания вектора напряжения, входом соединенного с преобразователем координат, первые два входа которого подключены соответственно к регуляторам намагничивающего и активного составляющих токов, вход регулятора намагничивающей составляющей тока через первый блок сравнения связан с регулятором потокосцепления, вход которого через второй блок сравнения подключен к блоку задания пото косцепления, вход регулятора активной составлящей тока через третий блок сравнения и блок деления связан с регулятором скорости, вход которого через четвертый блок сравнения и задатчик интенсивности соединен с блоком задания частоты вращения, модель асинхронного двигателя с.- выходами сигналов потокосцепления, токов в . двухфазной неподвижной системе координат и выходом величины момента, блок определения частоты вращения, составленный из последовательно включенных моделей передачи и исполнительного механизма, который соединен с вторым входом четвертого блока сравнения, отличающееся тем, что, с целью упрощения и повышения точности,в него введены модель инвертора, блок преобразования трехфазного напряжения в двухфазное, блок | вычисления модуля потокосцепления, сл блок преобразования модулей токов каждой фазы, а модель асинхронного двигателя выполнена в виде двухфазной Т-образной схемы замещения, каждая фаза которой составлена из последовательно соединенных резисторов и дросселей с йараметрами, эквивалент ными параметрам активного сопротивления статора и индуктивности расN5 сеяния статора, индуктивности расх сеяния ротора и активного сопротивле ния ротора, двух инт.еграторов, двух 9) блоков перемножения и инвертора, при этом входы каждой схемы замещения соединены с выходами мрдели инвертора через блок преобразования трехфазного напряжения в двухфазное, входы первого и второго интеграторов подклю- чены соответственно к общим точкам соединения резистора и дросселя с параметрами, эквивалектными параметрам индуктивного сопротивления рассеяния ротора и активного сопротивления ротора в каждой фазе модели, выход
Изобретение относится к электротехнике и может быть использовано.в системах регулируемого асинхронного электропривода текстильной промышлен (Вости и в других отраслях Известно устройство для управлени асинхронньш частотно-регулируемым электродвигателем, работающее по при ципу векторного, управления и содержа щее каналы регулирования потокосцепления и скорости, а также блок компе сационных связей, блоки прямого и обратного преобразования координат, датчики потока и тока статора, преоб разователь фаз 1J . Недостатком устройства является сложность управляющих и функциональных устройств при реализации преобразования координат и фаз. Наиболее близким техническим реше кием к изобретению является устройст во для управления асинхронным частот но-регулируемьот электродвигателем, содержащее инвертор напряжения, пред назначенный для подключения к указан ному электродвигателю, асинхронный электродвигатель, блок управления частотой и модулем напряжения инвертора напряжения, вход которого подключен к блоку формирования задания вектора напряжения, входы которого подключены к преобразователю кобрдинат, первые два входа которого . подключены соответственно к регуля торам намагничивающего и активного состасвляющих токов, вход регулятора намагничивающей составляияцей тока через первый блок сравнения подключен к регулятору потокосцепления,/вход которого через второй блок сравнения подключен к блоку задания потокосцепления, вход регулятора активной составляющей тока через третий блок сравнения, блок деления подклочен к регулятору скорости, вход которого через четвертый блок сравнения и задатчик интенсивност и соединен с блоком задания частоты вращения, модель асинхронного двигателя, имеющая выходы сигналов потокосцепления, токов в двухфазной неподвижной системе координат, выход величины момента, . а блок определения частоты вращения соединен с вторьм; входом четвертого блока сравнения 2. Недостатками устройства являются конструктивная сложность системы управления, невысокая надежность и невысокое качество регулирования скорости, что не позволяет учитывать изменения момента инерции, упругость передачи, нелинейность характеристики преобразователя частоты, а также насьвцение магнитной системы асинхронного двигателя. Целью изобретения является повышение точности и упрощение системы управления.
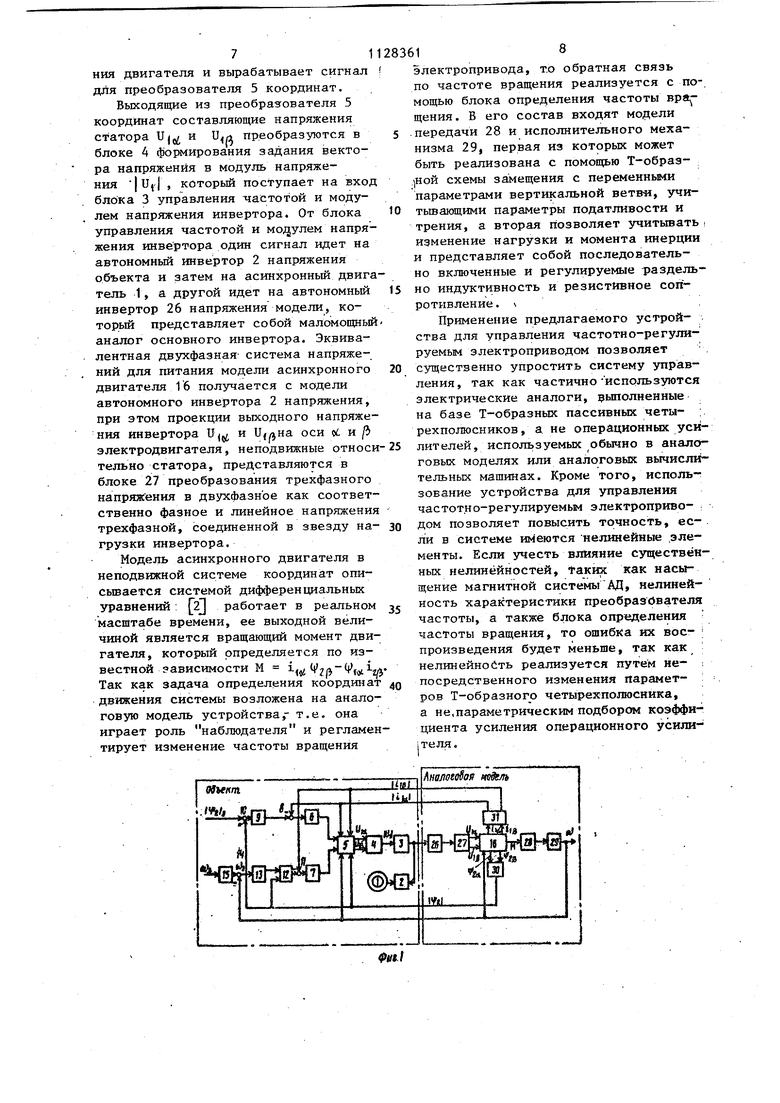
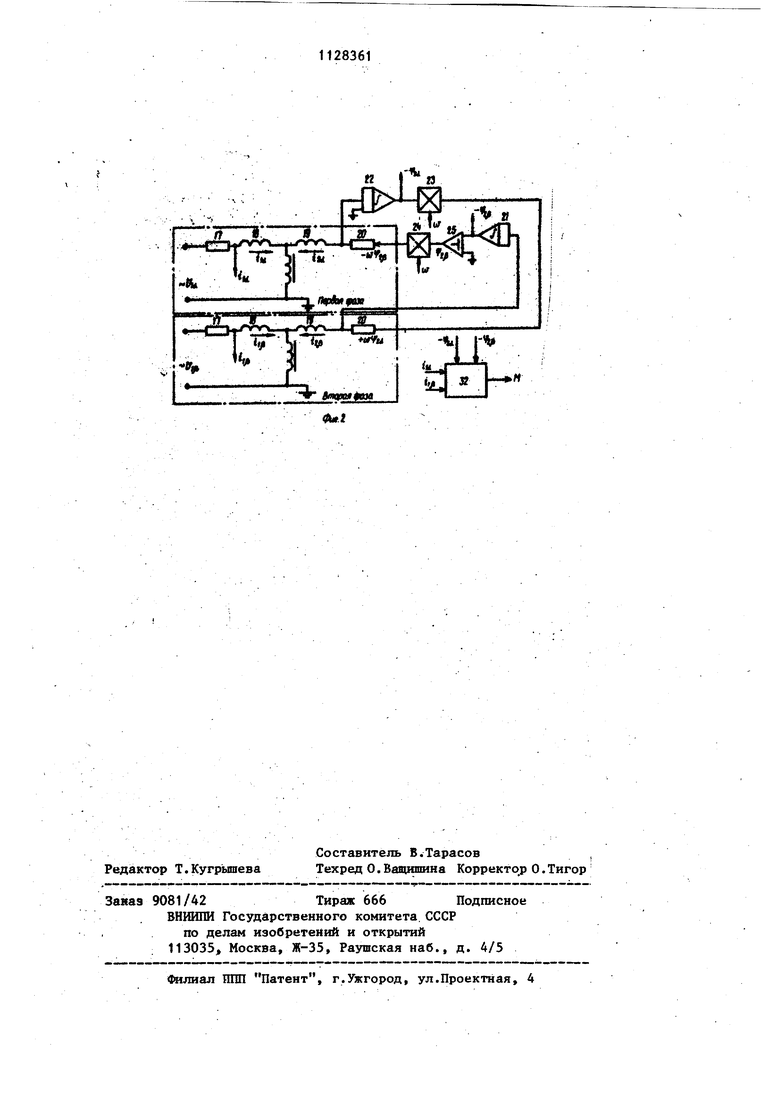
Указанная цель достигается тем, что в устройство для управления асинхронным частотно-регулируемым электродвигателем, содержащее асинхронный электродвигатель,подключенньй к инвертору напряжения,блок управления частотой и.модулем напряжения инвертора напряжения, вход которого .подключен к блоку формирования задания вектора напряжения, входы которого подключены к преобразователю координат, первые два входа которого подключены соответственно к регуляторам намагничивающего и активного составляющих токов, вход регулятора намагничивающей составляющей тока через первьй блок сравнения подключен, к регулятору потокосцепления, вход которого через второй блок сравнения .подключен к блоку задания noTO:косцепления, вход регулятора активной составляющей тока через третий блок сравнения и блок деления подключен к регулятору скорости, вход которого через четвертьйг блок сравнения и задатчик интенсивности соединен с блоком задания частоты вращения, модель асинхронного двигателя, имеющая выходы сигналов потокосцепления, токов в двухфазной неподвижной системе координат, выход величины момента, блок определения частоты вращения соединен с вторым входсж четвертого блока сравнения, введены модель инвертора, блок преЬбразования трехфазного напряжения в двухфазное, блок вычисления потокосцепления, блок преобразования модулей токов каждой фазы, а модель асинхронного двигателя выполнена в виде двухфазной Т-образной схемы замещения, состоящей на каждую фазу из последовательно соединенньк резисторов и дросселей с параметрами, эквивалентньми параметрам активного сопротивлекия статора и индуктивности рассеяния статора, индуктивности рассеяния ротора и активного сопротивления ротора, двух интеграторов, двух блоков перемножения и инвертора, при этом входы каждойгсхемы замещения соединены с выходами модели инвертора через блок преобразования трехфазного нап.ряжения в двухфазное, входы первого и второго интеграторов подключены соответственно к общим точкам соединения резистора и дросселя с параметрами, эквивалентными параметрам индуктивного сопротивления рассеяния ротора и активного сопротивления роi тора в каждой фазе модели, выход пер,вого интегратора через первый блок перемножения, второй вход которого соединен с блоком определения частоты вращения, соединен со свободным зажимом резистора с параметром, эквивалентным активному сопротивлению ротора во второй фазе, выход второго интегратора через инвертор.подключен к второму блоку перемножения, второй вход которого соединен с, блоком определения частоты вращения, а выход второго блока перемножения соединен со свободным зажимом резистора с параметром, эквивалентные активному сопротивлению ротора в первой фазе, при этом выходы интеграторов поДклочены к блоку вычисления модуля потокосцепления, выход KOTojjoro подключе к второму входу блока деления, к второму входу-второго блока сравнения, к третьему входу преобразователя коодинат, общие точки резистора и дросселя с параметрами, эквивалентньии активному сопротивление статора и индуктивности через блок преобразовани модулей токов каждой фазы соединены с вторыми входами первого и третьего блоков сравнения, с четвертым и пятым входами преобразователя координат, шестой вход которого соединен с выходом блока определения частоты вращения.На фиг. 1 представлена фнукциональная схема устройства для управления асиихронньм частотно-регулируетда электродвигателем; на фиг. 2 - модель
асинхронного электродвигателя. .1
Устройство-для управления асинхронньм частотно-регулируемьм электро:Двига.тёлем содержит асинхронный электродвигатель 1, подклоченшлй к инвертору 2 напряжения, блок 3 управг ления частотой и модулем напряжения . инвертора напряжения, вход которого подключен к блоку 4 формирования/ ;задания вектора напряжения, входы которого подклочены к преобразователю 3 координат, первые два входа которого подключены соответственно к регуляторам Намагничивающего 6. и активного 7 составляющих токов. Вход регулятора 6 намагничивающей составляющей тока через первьй блок 8 срав нения подключен к регулятору 9 пото-; косцепления, вход которого через второй блок 10 сравнения подключен к блоку задания потокосцепления/(. Вход регулятора 7 активной составляющей тока через третий блок 11 сравнения, блок 12 деления подключен к регулятору 13 скорости, вход которого через четвертый блок 14 сравнения и задатчик 15 интенсивности соединен с блоком задания частоты вращения Модель асинхронного двигатет ля 16 (фиг. 2) содержит трехфазную Т-образную схему замещения, состоящую на каждую фазу из последовательно соединенных резисторов и дросселей с параметрами, зквивалентными параметрам активного сопротивления статора 17 и индyкtивнo.cтн рассеяния статора 18, индуктивности рассеяния ротора 19 и активного сопротивления ротора 20, а также два интегратора 21 и 22, два блpka 23 и 24 перемножения и инвертор 25, при этом входы каждой схемы замещения соединены с выходами модели инвертора 26 через блок 27 преобразования трехфазного на.пряжения в двухфазное. Входы первого 22 и второго 21 интеграторов подключены соответственно к общим точкам соединения резистора и дросселя с параметрами, эквивалент ными параметрам индуктивного сопротивления рассеяния ротора 19 и акти ного сопротивления ротора 20 в каждой фазе модели. Выход первого интегратора 22 черег первый блок 23 перемножения, второй вход которого соединен с блоком определения частоты вращения, состоящим из последоватега но включенных моделей передачи 28 и исполнительного механизма 29 (фиг. 1), соединен со свббодным зажимом резистора, эквивалентного активному сопротивлению ротора 20 во второй фазе. Выход второго интегратора 21 через инвертор 25 подключен к второму. . блоку 24 перемножения, второй вход которого соединен с блоком опреде ления частоты вращения, а выход вто рого блока 24 перемножения соединен со свободные зажимом резистора, экв валентного активному сопротивлению ротара 20 в первой фазе. При этом . выходы интеграторов 21 и 22 подключены к .блоку 30 5 вычисления модуля потокосцепления 30, вьЬсод которо го подключен к второму входу блока 12 деления, к второму входу вто116 . рого блока 10 сравнения, к третьему входу преобразователя 5 координат. Общие точки резистора, эквивалентного активному сопротивлению статора, и дросселя, эквивалентного индуктивности рассеяния статора, через блок 31 преобразования модуля токов каждой фазы соединены с вторыми входами первого 8 и третьего 11 блоков сравнения, с четвертым и пятьм входами преобразователя 5 координат, шестой вход которого соединен с выходом блока определения частоты вращения. Общие точки резистора, эквивалентного активному сопротивлению- статора 17, и дросселя, эквивалентного индуктивности рассеяния статора 18, а также выходы интеграторов 21 и 22 соединены с четырьмя входами третьего блока 32 перемножения, выход которого подключен к блоку определения частоты вращения. Устройство работает следующим бразом. Сначала подается сигнал ((jj) на ход регулятора 9 потокосцепления, оторый, компенсируя большую постонную времени объекта, формирует ереходный процесс установления заданного потокосдепления ротора соответственно модульному оптимуму. Одновременно регулятор 9 потокосцепления вьграбатываёт уставку для регулятора 6 намагничивающего тока асинхронного двигателя, который компенсирует большую постоянную времени paqсеивания двигателя. Регулятор 6 намагничивающего тока статора в свою очередь вырабатывает уставку входно-. го напряжения блока 3 управления / частотой и модулем напряжения ин:вертора напряжения, пройдя при этом преобразователь 5 координат и блок 4 формирования задания вектора напряг жения. На регулятора 13 скорое-, ти через задатчик 15 интенсивности , подается сигнал задания скорости. Одновременно на выходе регулятора 13 скорости появляется, сигнал задания электромагнитного момента, который после прохождения через делительное. устройство 12 образует сигнал задания активного тока статора. Регулятор скорости компенсирует электромеханическую постоянную времени, а регулятор 7 активного тока статора компенсирует постоянную времени рассеива71ния двигателя и вырабатывает сигнал дЛя преобразователя 5 координат. Выходящие из преобразователя 5 координат составляющие напряжения статора Uj и преобразуются в блоке 4 формирования задания вектора напряжения в модуль напряжения llJjj , который поступает на вход блока 3 управления частотой и модулем напряжения инвертора. От блока управления частотой и модулем напряжения инвертора один сигнал идет на автономный инвертор 2 напряжения объекта и затем на асинхронный двига тель 1, а другой идет на автономный инвертор 26 напряжения модели, который представляет собой маломощный аналог основного инвертора. Эквивалентная двухфазная система напряжений для питания модели асинхронного двигателя 16 получается с модели автономного инвертора 2 напряжения, при этом проекции выходного напряжения инвертора Uj и оси ot и /5 электродвигателя, неподвижные относи тельно статора, представляются в блоке 27 преобразования трехфазного напряжения в двухфазное как соответственно фазное и линейное напряжения трехфазной, соединенной в звезду нагрузки инвертора. Модель асинхронного двигателя в неподвижной системе координат описьшается системой дифференциальных уравнений : 2 работает в реальном масштабе времени, ее выходной величиной является вращающий момент двигателя, который определяется по известной зависимости М ifii (atiirA Так как задача определения координат движения системы возложена на аналоговую модель устройства,- т.е. она играет роль наблюдателя и регламен тирует изменение частоты вращения 18 электропривода, то обратная связь по частоте вращения реализуется с по-. мощью блока определения частоты вра щения. В его состав входят модели передачи 28 и исполнительного механизма 29, первая из которых может быть реализована с помощью Т-образ ной схемы замещения с переменными параметрами вертикальной ветв«, учитьтающими параметры податливости и трения, а вторая позволяет учитьгоатьi изменение нагрузки и момента инерции и представляет собой последовательно включенные и регулируемые раздельно индуктивность и резистивное сопротивление . Применение предлагаемого устройства для управления частотно-регулируемым электроприводом позволяет сзпцественно упростить систему управления, так как частичноиспользуются электрические аналоги, ьшолненные на базе Т-образных пассивных четы- ; рехполюсников, а не операционных усилителей, используемых обычно в аналоговых моделях или аналоговых вычислительных машинах. Кроме того, использование устройства для управления частотно-регулируемьм электроприво- : дом позволяет повысить точность, ее- ли в системе имеются нелинейные .элементы. Если учесть влияние существенных нелинёйностей. Таких как насыщение магнитной системы АД, нелинейность характеристики преобразователя частоты, а также блока определения частоты вращения, то ошибка их вое- ; произведения будет меньше, так как нелинейнойть реализуется путем не- ; посредственного изменения параметров Т-образного четырехполюсника, а не,параметрическим подберет коэффициента усиления операционного уеили1теля.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шреймер Р.Т | |||
| Оптимальное частотное управление асинхронными электроприводами | |||
| Кишинев, Штиница, 1982, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
