ное сопротивление рассеяния статора дл первой фазы,и к общей точке элементов, моделирукяцих эквивалентное сопротивление взаимоиндуктивности и эквивалентное сопротивление рассеяния ротора для второй фазы, выход первого инвертора через первый сумматор, второй вход которого соединен с общей точкой элементов, моделирующих эквивалентные сопротивления взаимоиндуктивности и эквивалентное сопротивление рассеяния ротора, подключен к первому входу второго блока перемножения, второй вход которого подключен к блоку определения частоты вращения, а выход второго блока перемножения соединен со свободным зажимом элемента, моделирующего эквивалентное активное сопротивление ротора второй фазы„ выход второго инвертора через второй сумматор, второй выход которого соединен с общей .точкой элементов, моделирующих эквивалентные сопротивления взаимоиндуктивности и эквивалентное сопротивление рассеяния статора, соединен с первым блоком перемножения, второй вход которого подключен к блоку определения частоты вращения, а выход первого блока перемножения соединен со свободным зажимом элемента, моделирующего эквивалентное сопротивление ротора перво фазы, выходы первого и второго сумматоров соединены с входами блока вычисления модуля потокосцепления, выход которого подключен к второму входу блока деления, к второму входу второго блока сравнения, к третьему входу преобразователя координат, выходы блока преобразования трехфазных токов в двухфазные соединены с входами блока преобразования модулей токов каждой фазы, выходы которого соединены с вторыми выходами первого и третьего блоков сравнения, с четвертым и пятым входами преобразователя координат, шестой вход которого соединен с выходом блока определения частоты вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |

ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный электродвигатель, подключенньй к инвертору напряжения, блок управления частотой и модулем напряжения инвертора напряжения, вход которого подключен к блоку формирования задания вектора напряжения , входы которого подключены к преобразователю координат, первые два входа которого подключены соответственно к регуляторам намагничивающей и активной составляющих токов, вход регулятора намагничивающей составляющей тока через первьй блок сравнения подключен к регулятору потокосцепления, вход которого через второй блок сравнения подключен к блоку задания потокосцепления, вход регулятора активной составляющей тока через третий блок сравнения, блок деления подключен к регулятору скорости, вход которого через четвертьй блок сравнения и задатчик интенсивности соединен с блоком задания частоты вращения, модель асинхронного двигателя , имеющая выходы сигналов потокосцепления, вькод величины момента, а блок определения частоты вращения, состоящий из последовательно включенных моделей передачи и исполнительного механизма, соеди нен с вторым входом четвертого блока сравнения, отличающийся тем, что, с целью упрощения и повышения точности, введен блок преобраi зования трехфазных токов в двухфазные, блок вьучисления модуля пото(Л косцепления , а модель асинхронного С двигателя состоит из двухфазной П-образной схемы замещения, включаю-, щей в каждой фазе последовательно включенные элементы, моделирующие эквивалентное сопротивление взаимо индуктивности и активного сопротивле00 ния ротора, пареллельно включенных « элементов, моделирующих эквивалентные сопротивления рассеяния ста9) тора, ротора и активное сопротив1Й ление статора, два инвертора, два блока перемножения и два сумматора, при этом входы каждой схемы замеще- ния соединены с выходами инвертора напряжения через блок преобразования трехфазных токов в двухфазные, входы первого и второго инверторов подключены соответственно к общей точке соединения элементов, моделирующих эквивалентное сопротивление взаимоиндуктивности и эквивалент
Изобретение относится к электротехнике, а точнее к автоматическим устройствам для управления электроприводами переменного тока и может быть использовано в системах регулируемого асинхронного электропривода текстильной промьшшенности и в других отраслях.
Цель изобретения - упрощение и повышение точности за счет исключения промежуточных аналоговых преобразователей.
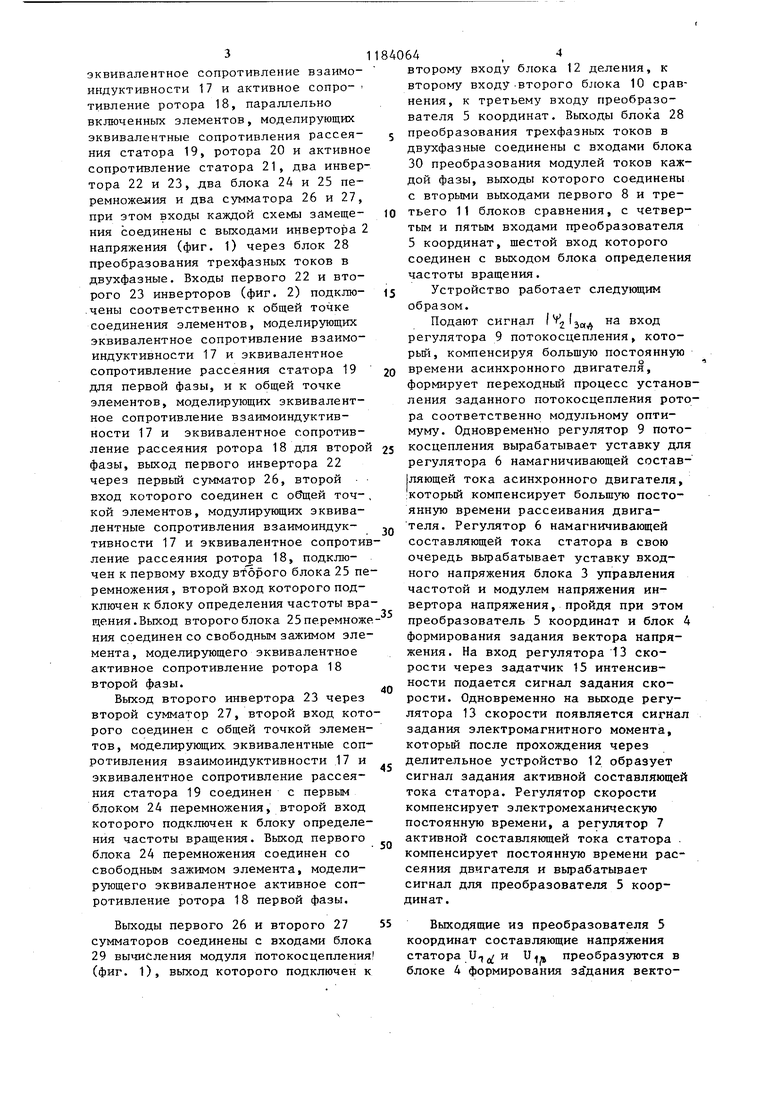
На фиг. 1 представлена функциональная схема частотно регулируемого асинхронного электропривода; на фиг. 2 - модель асинхронного электродвигателя.
Частотно-регулируемый асинхронньм электропривод (фиг. 1) содержит асинхронный электродвигатель 1, подключенный к инвертору 2 напряжения , блок 3 управления частотой и модулем напряжения инвертора напряжения, вход которого подключен к блоку 4 формирования задания вектора напряжения, входы которого подключены к преобразователю 5 координат, первые два входа которого подклочены соответственно к регуляторам
намагничивающей 6 и активной 7 составляющих токов. Вход регулятора 6 намагничивающей составляющей тока через первьй блок 8 сравнения подключен к регулятору 9 потокосцепления, вход которого через второй блок 10 сравнения подключен к блоку задания потокосцепления (зад Вход регулятора 7 активной составляющей тока через третий блок 11 сравнения, блок 12 деления подключен к регулятору 13 скорости, вход которого через четвертый блок 14 сравнения и задатчик 15 интенсивности соединен с блоком задания частоты
вращения uij .
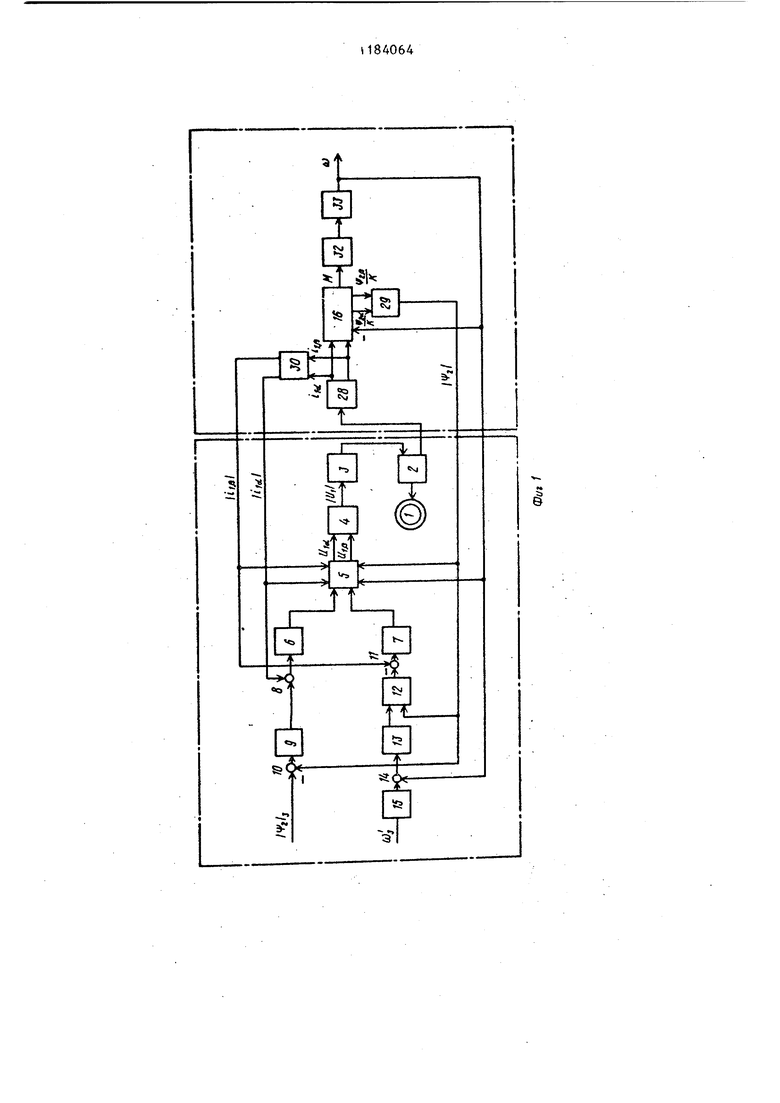
Модель асинхронного двигателя 16 содержит двухфазную П-образную схему замещения, состояпото (фиг. 2) в каждой фазе из последовательно включенных элементов, моделирующих
3
эквивалентное сопротивление взаимоиндуктивности 17 и активное сопротивление ротора 18, параллельно включенных элементов, моделирующих эквивалентные сопротивления рассеяния статора 19, ротора 20 и активное сопротивление статора 21, два инвертора 22 и 23, два блока 24 и 25 перемножения и два сумматора 26 и 27, при этом входы каждой схемы замещения соединены с выходами инвертора 2 напряжения (фиг. 1) через блок 28 преобразования трехфазных токов в двухфазные. Входы первого 22 и второго 23 инверторов (фиг. 2) подключены соответственно к общей точке соединения элементов, моделирующих эквивалентное сопротивление взаимоиндуктивности 17 и эквивалентное сопротивление рассеяния статора 19 для первой фазы, и к общей точке элементов, моделирующих эквивалентное сопротивление взаимоиндуктивности 17 и эквивалентное сопротивление рассеяния ротора 18 для второй фазы, выход первого инвертора 22 через первый сумматор 26, второй вход которого соединен с ойцей точкой элементов, модулирующих эквивалентные сопротивления взаимоиндуктивности 17 и эквивалентное сопротивление рассеяния ротора 18, подключен к первому входу второго блока 25 перемножения, второй вход которого подключен к блоку определения частоты вращения. Выход второго блока 25перемноже ния соединен со свободным зажимом элемента , моделирующего эквивалентное активное сопротивление ротора 18 второй фазы.
Выход второго инвертора 23 через второй сумматор 27, второй вход которого соединен с общей точкой элементов, моделирующих, эквивалентные сопротивления взаимоиндуктивности 17 и эквивалентное сопротивление рассеяния статора 19 соединен с первым блоком 24 перемножения, второй вход которого подключен к блоку определения частоты вращения. Выход первого блока 24 перемножения соединен со свободным зажимом элемента, моделирующего эквивалентное активное сопротивление ротора 18 первой фазы.
Выходы первого 26 и второго 27 55 сумматоров соединены с входами блока 29 вычисления модуля потокосцепления (фиг. 1), выход которого подключен к
84064 , 4
второму входу блока 12 деления, к второму входу-второго блока 10 сравнения, к третьему входу преобразователя 5 координат. Выходы блока 28 5 преобразования трехфазных токов в двухфазные соединены с входами блока 30 преобразования модулей токов каждой фазы, выходы которого соединены с вторыми выходами первого 8 и третьего 11 блоков сравнения, с четвертым и пятым входами преобразователя 5 координат, шестой вход которого соединен с выходом блока определения частоты вращения.
15 Устройство работает следующим образом.
Подают сигнал (гза вход регулятора 9 потокосцепления, котокомпенсируя большую постоянную рый, времени асинхронного двигателя, формирует переходный процесс установления заданного потокосцепления ротора соответственно модульному оптимуму. Одновременно регулятор 9 потокосцепления вырабатывает уставку для регулятора 6 намагничивающей составляющей тока асинхронного двигателя, который компенсирует большую постоянную времени рассеивания двигателя. Регулятор 6 намагничивающей составляющей тока статора в свою очередь вьфабатывает уставку входного напряжения блока 3 управления частотой и модулем напряжения инвертора напряжения, пройдя при этом преобразователь 5 координат и блок 4 формирования задания вектора напряжения. На вход регулятора 13 скорости через задатчик 15 интенсивности подается сигнал задания скорости. Одновременно на выходе регулятора 13 скорости появляется сигнал задания электромагнитного момента, который после прохождения через делительное устройство 12 образует сигнал задания активной составляющей тока статора. Регулятор скорости компенсирует электромеханическую постоянную времени, а регулятор 7 активной составляющей тока статора . компенсирует постоянную времени рассеяния двигателя и вьфабатывает сигнал для преобразователя 5 координат .
Выходящие из преобразователя 5 координат составляющие напряжения статора и и преобразуются в блоке 4 формирования заедания вектоpa напряжения в модуль напряжения Iи I , который поступает на вход блока 3 управления частотой и модулем напряжения инвертора от которого сигнал вдет на автономный инвертор 2 напряжения объекта и затем на асинхронный двигатель 1. Выходной сигнал автономного инвертора 2, состоящий из трехфазных токов поступает в блок 28 .преобразования трехфазных токов в двухфазные и тем самым на входе модели асинхронного двигателя 16 имеем два источника тока ii(/H . Использование источников 1 вместо источников напряжения позволяет упростить модель электроприводаS так как нет необходимости в создании физической модели инвертора напряжения.
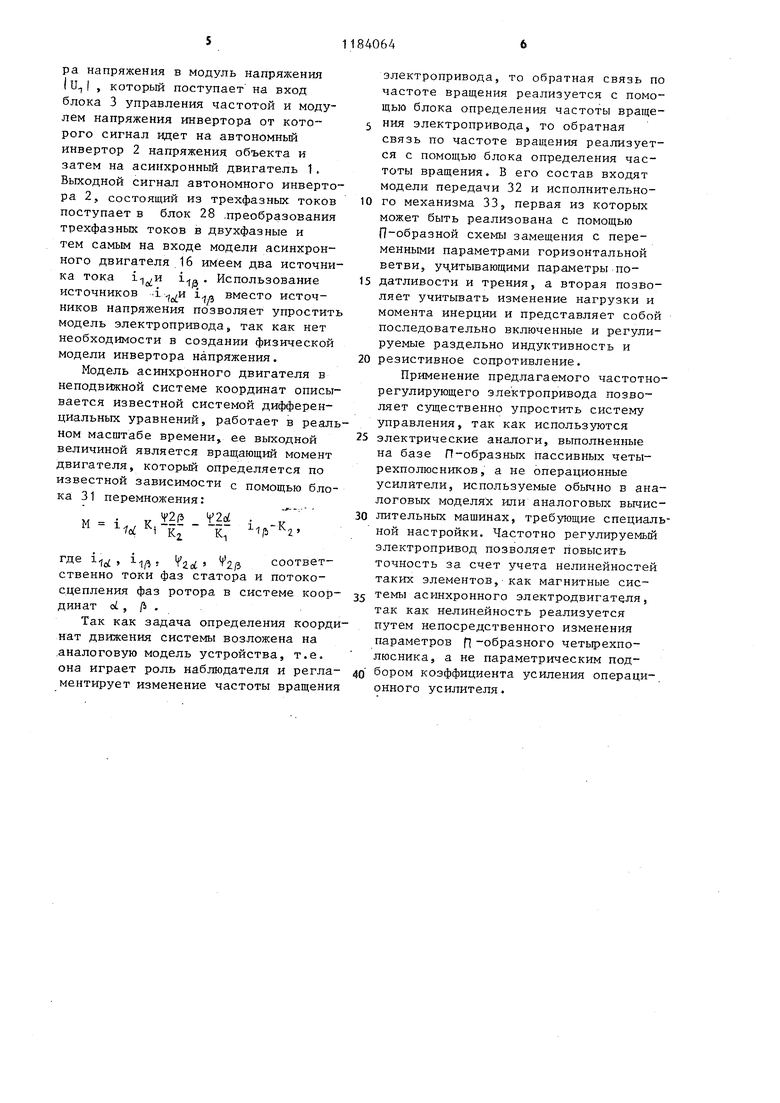
Модель асинхронного двигателя в неподвижной системе координат описывается известной системой дифференциальных уравнений, работает в реальном масштабе времени, ее выходной величиной является вращающий момент двигателя, который определяется по известной зависимости с помощью блока 31 перемножения:
М - i к 2е - t2ci . с i Kj, К, Р 2
где i , . (f.j , 2/3 соответственно токи фаз статора и потокосцепления фаз ротора в системе координат oi , /i .
Так как задача определения координат движения системы возложена на .аналоговую модель устройства, т.е. она играет роль наблюдателя и регламентирует изменение частоты вращения
электропривода, то обратная связь по частоте вращения реализуется с помощью блока определения частоты вращеНИН электропривода, то обратная
связь по частоте вращения реализуется с помощью блока определения частоты вращения. В его состав входят модели передачи 32 и исполнительного механизма 33, первая из которых может быть реализована с помощью П образной схемы замещения с переменными параметрами горизонтальной ветви, уч итывающими параметры податливости и трения, а вторая позволяет учитывать изменение нагрузки и момента инерции и представляет собой последовательно включенные и регулируемые раздельно индуктивность и
резистивное сопротивление.
Применение предлагаемого частотнорегулирующего электропривода позволяет существенно упростить систему управления, так как используются
электрические аналоги, выполненные на базе П-образных пассивных четырехполюсников, а не операционные усилители, используемые обычно в аналоговых моделях или аналоговых вычислительных машинах, требующие специальной настройки. Частотно регулируемый электропривод позволяет повысить точность за счет учета нелинейностей таких элементов, как магнитные системы асинхронного электродвигателя, так как нелин.ейность реализуется путем непосредственного изменения параметров П -образного четырехполюсника, а не параметрическим подбором коэффициента усиления операционного усилителя. 21 I J. Umj3 20 Вторая фаза . V , /r I к iifl-
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шрейнер Р.Т., Дмитренко Ю.А | |||
| Оптимальное частотное управление асинхронными электроприводами | |||
| - Кишинев: Штиница, 1982, с | |||
| Способ получения монокристаллов в виде полых тел вращения | 1961 |
|
SU144153A1 |
