ФигЛ
системой автоматического вождения, подключенной через устройство изменения скважности к исполнительным механизмам. Агрегат снабжен копирами и датчиками курса, установленными на шарнирах перпенди- кулярно движению агрегата впереди и позади трактора и выполненными в виде штанг, например, с опорными роликами для взаимодействия со стенкой (откосом) канала 2. Копиры через угловые датчики формируют сигналы управления работой
логической системой автовождения (бортовым компьютером) трактора агрегата. Повышение надежности дождевального агрегата при автовождении достигается путем получения дополнительной информации от датчиков о положении агрегата относительно канала, которая после обработки в бортовом компьютере подается на исполнительный механизм через устройство, регулирующее скважность его включения в зависимости от сигналов датчиков. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный дождевальный агрегат | 1989 |
|
SU1761051A1 |
| Дождевальный агрегат | 1988 |
|
SU1576059A1 |
| Устройство для автоматического направления движения самоходного дождевального агрегата | 1989 |
|
SU1683573A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| СПОСОБ ПЕРЕВОДА ФРОНТАЛЬНО УСТАНОВЛЕННОЙ ФЕРМЫ ДВУХКОНСОЛЬНОГО ДОЖДЕВАЛЬНОГО АГРЕГАТА ИЗ РАБОЧЕГО ПОЛОЖЕНИЯ В ТРАНСПОРТНОЕ И ОБРАТНО | 2003 |
|
RU2240683C1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
Изобретение относится к сельскому хозяйству и может быть использовано при автоматизации орошения двухконсольными дождевальными агрегатами (ДА). Цель изобретения - повышение надежности работы агрегата при автовождении. Автоматизированный дождевальный агрегат включает ферму 1 с распылителями, трубопровод подачи воды из канали и трактор с логической системой автоматического вождения, подключенной через устройство изменения скважности к исполнительным механизмам. Агрегат снабжен копирами и датчиками курса, установленными на шарнирах перпендикулярно движению агрегата впереди и позади трактора и выполненными в виде штанг, например, с опорными роликами для взаимодействия со стенкой (откосом) канала 2. Копиры через угловые датчики формируют сигналы управления работой логической системой автовождения (бортовым компьютером) трактора агрегата. Повышение надежности дождевального агрегата при автовождении достигается путем получения дополнительной информации от датчиков о положении агрегата относительно канала, которая после обработки в бортовом компьютере подается на исполнительный механизм через устройство, регулирующее скважность его включения в зависимости от сигналов датчиков. 5 ил.
Изобретение относится к сельскому хозяйству и может быть использовано при автоматизации ороше ния сельскохозяйственных культур дождевальными агрегатами типа ДДА-100.
Целью изобретения является повышение надежности работы агрегата.
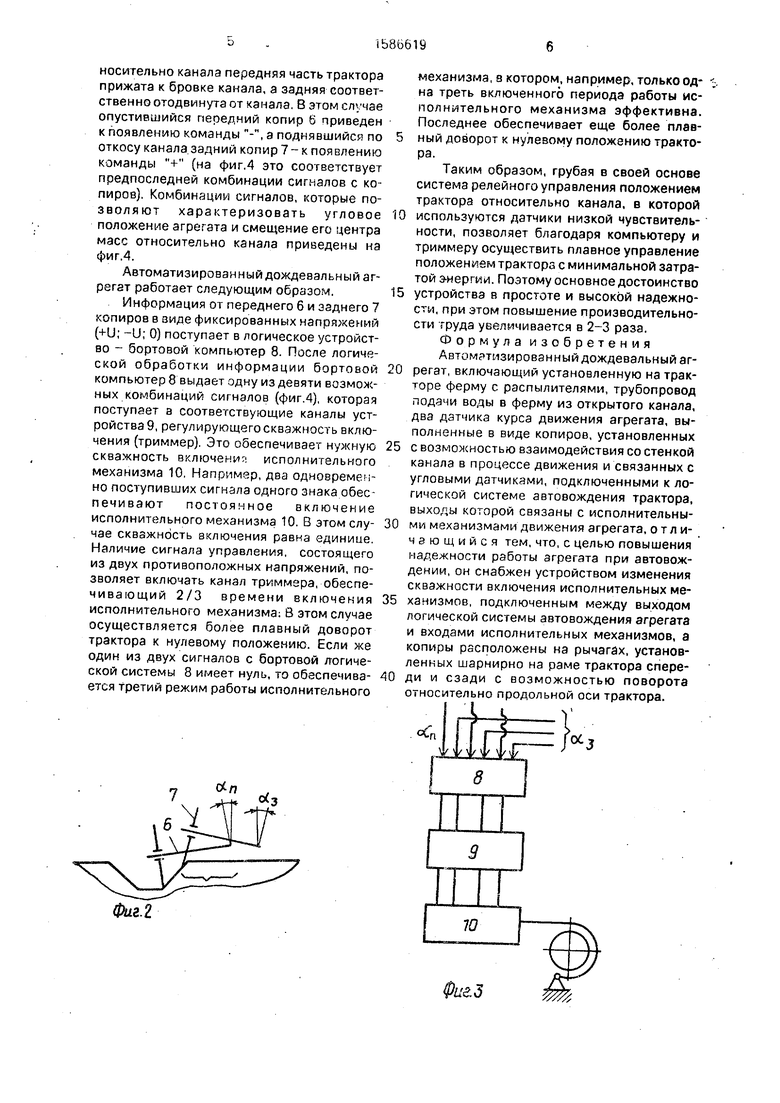
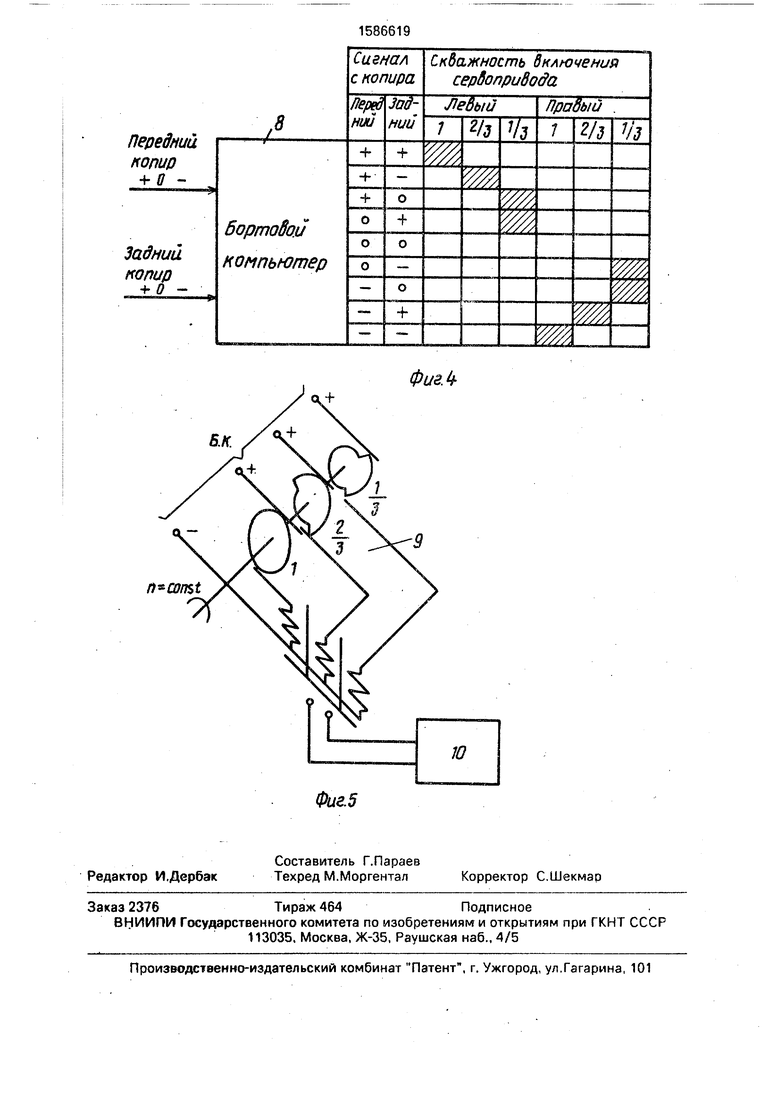
На фиг.1 представлен автоматизированный дождевальный агрегат, общий вид; на фиг.2 - положение копиров при отклонении агрегата от заданного курса движения; на фиг.З - блочная схема системы управления автоматизированным дождевальным агрегатом; на фиг.4 - таблица скважности включения исполнительных механизмов; на фиг.5 - схема реализации устройства сужения скважности включения исполнительных механизмов.
Автоматизированный двухконсольный дождевальный агрегат устроен следующим образом. Двухконсольная дождевальная ферма 1 навешана вместе с трубопроводом подачи воды из канала 2 на гусеничный трактор 3. Рычаги (штанги) 4 установлены на шарнирахБ перпендикулярно движению агрегата (фиг.1). Агрегат снабжен двумя копирами 6 и 7, например, с роликами на концах. Для случайного, произвольно выбранного положения агрегата относительно канала, например, передний -копир 6 находится в нижней части стенки (откоса) канала и дает через замкнутые контакты информацию о приближении передней части агрегата к каналу, которая выражается углом «п (фиг.2). Задний копир 7 находится а верхней части стенки (откоса) и, замыкая аналогичные цепи, обеспечивает информацию об удалении задней части трактора 3, которая выражает- ся.угломо:з(фиг.2). Информация от копиров (фиг,4) в виде напряжения (+, О, -) поступает на логическую систему автовождения трактора - бортовой компьютер (БК) 8, который электрически связан с устройством
9 изменения скважности включения (фиг.5) исполнительного механизма 10 (фиг.З).
Устройство 9 изменения скважности включения исполнительных механизмов
(фиг.5) представляет собой по существу электромеханический переключатель с тремя индуктивными катушками. Сердечники катушек в зависимости от включенной цепи питания (12/361/3) могут удерживать контакты исполнительного механизма полностью включенным (1), включенным на 2/3 времени рабочего цикла или соответственно на 1/3 этого ц /кла. Существуют также электронные устройства (модуляторы широтные или частотные), которые решают аналогичные задачи. Кроме того на выходе устройства 9 показаны индукционные катушки, связанные через электрогидравлические блоки с гидроусилителями (не
показаны) с тормозами гусеничного тракта (фиг.З, внизу).
С каждого датчика угла Ап и Аз на бортовой компьютер снимаются сигналы: минус (-), если копир опустился вниз, плюс
(+), если копир поднялся вверх по откосу канала, и ноль (О), если копиры находятся в средней части канала.
Необходимость использования бортового компьютера следует из необходимости
обработки поступающей с копиров информации (фиг,4) и для согласования последовательности выполнения технологических операций дождевания при автоматизированной работе агрегата в загоне. При реверее движения агрегата сигналы датчиков инвертируются. Таким образом необходимость инверсии сигналов с датчиков вытекает из реверсивного режима работы агрегата, так как датчик, находившийся, например, при прямом движении впереди, при обратном движении обязан выполнять функции заднего.
В предлагаемом положении копиров (фиг.2) при угловом смещении агрегата от
носительно канала передняя часть трактора прижата к бровке канала, а задняя соответственно отодвинута от канала. В этом случае опустившийся передний копир 6 приведен к появлению команды -, а поднявшийся по откосу канала.задний копир 7 - к появлению команды + (на фиг,4 это соответствует предпоследней комбинации сигналов с копиров). Комбинации сигналов, которые позволяют характеризовать угловое положение агрегата и смещение его центра масс относительно канала приведены на фиг.4.
Автоматизированный дождевальный агрегат работает следующим образом.
Информация от переднего 6 и заднего 7 копиров в зиде фиксированных напряжений (+U: -и,- 0} поступает в логическое устройство - бортовой компьютер 8. После логической обработки информации бортовой компьютер 8 выдает одну из девяти возможных комбинаций сигналов (фиг.4), которая поступает а соответствующие каналы устройства 9, регулирующего скважность включения (триммер). Это обеспечивает нужную скважность включени-; исполнительного механизма 10. Например, два одновременно поступивших сигнала одного знака обес- печивают постоянное включение исполнительного механизма 10. В этом слу- чае скважность включения равна единице. Наличие сигнала управления, состоящего из двух противоположных напряжений, позволяет включать канал триммера, обеспечивающий 2/3 времени включения исполнительного механизма: 8 зтом случае осуществляется более плавный доворот трактора к нулевому положению. Если же один из двух сигналов с бортовой яогиче- ской системы 8 имеет нуль, то обеспечива- 4 ется Третий режим работы исполнительного
Фиг.2
0
5
механизма, s котором, например, только одна треть включенного периода работы исполнительного механизма эффективна. Последнее обеспечивает еще более плавный доворот к нулевому положению трактора.
Таким образом, грубая в своей основе система релейного управления положением трактора относительно канала, в которой используются датчики низкой чувствительности, позволяет благодаря компьютеру и триммеру осуществить плавное управление положением трактора с минимальной затратой энергии. Поэтому основное достоинство устройства в простоте и высокой надежности, при этом повышение производительности труда увеличивается в 2-3 раза. Формула изобретения Автоматизированный дождевальный агрегат, включающий установленную на тракторе ферму с распылителями, трубопровод подачи воды в ферму из открытого канала, два датчика курса движения агрегата, выполненные в виде копиров, установленных с возможностью взаимодействия со стенкой канала в процессе движения и связанных с угловыми датчиками, подключенными к логической системе автовождения трактора, выходы которой связаны с исполнительными механизмами движения агрегата, отличающийся тем, что, с целью повышения надежности работы агрегата при автовождении, он снабжен устройством изменения скважности включения исполнительных механизмов, подключенным между выходом логической системы автовождения агрегата и входами исполнительных механизмов, а копиры расположены на рычагах, установленных шарнирно на раме трактора спереди и сзади с возможностью поворота относительно продольной оси трактора.
i:-Г
3
.
/
/
лГ
8
Ю
teJ
Б.К.
ФивЛ
| Фронтальная многоопорная дождевальная машина | 1987 |
|
SU1517855A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
