Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при орошении сельскохозяйственных культур.
Известны агрегаты с навесным сельскохозяйственным оборудованием, в которых обеспечивается автоматическое вождение трактора, ориентированного на какой-либо репер. Так, например, известны гусеничные тракторы, в которых имеется автоматическое устройство, обеспечивающее движение трактора вдоль борозды.
Наиболее близким аналогом к заявляемому объекту является автоматизированный дождевальный агрегат с системой автоматического вождения, включающей датчик положения в вертикальной полости всасывающего клапана и бортовую ЭВМ с подключенными к ней системами стабилизации движения трактора по курсу и положения всасывающего клапана на поверхности воды в оросительном канале.
Недостатком данного устройства является то, что при работе такой автоматизированный дождевальный агрегат движется по синусоидальной траектории, что приводит к быстрому износу фрикционов механизма поворота трактора и, следовательно, снижает надежность работы агрегата в целом.
Целью изобретения является повышение надежности агрегата и снижение энергоемкости технологического процесса.
Указанная цель достигается тем, что автоматизированный дождевальный arpeiaT,
1 о
о сл
включающий ферму, трубопровод подачи воды из канала и трактор с бортовым компьютером, соответствующими согласующими блоками и исполнительными механизмами управления трактором, снабжен установленными определенным образом датчиками раздела сред грунт - вода, способными подавать сигналы при переходе ими границы между водой и берегом канала.
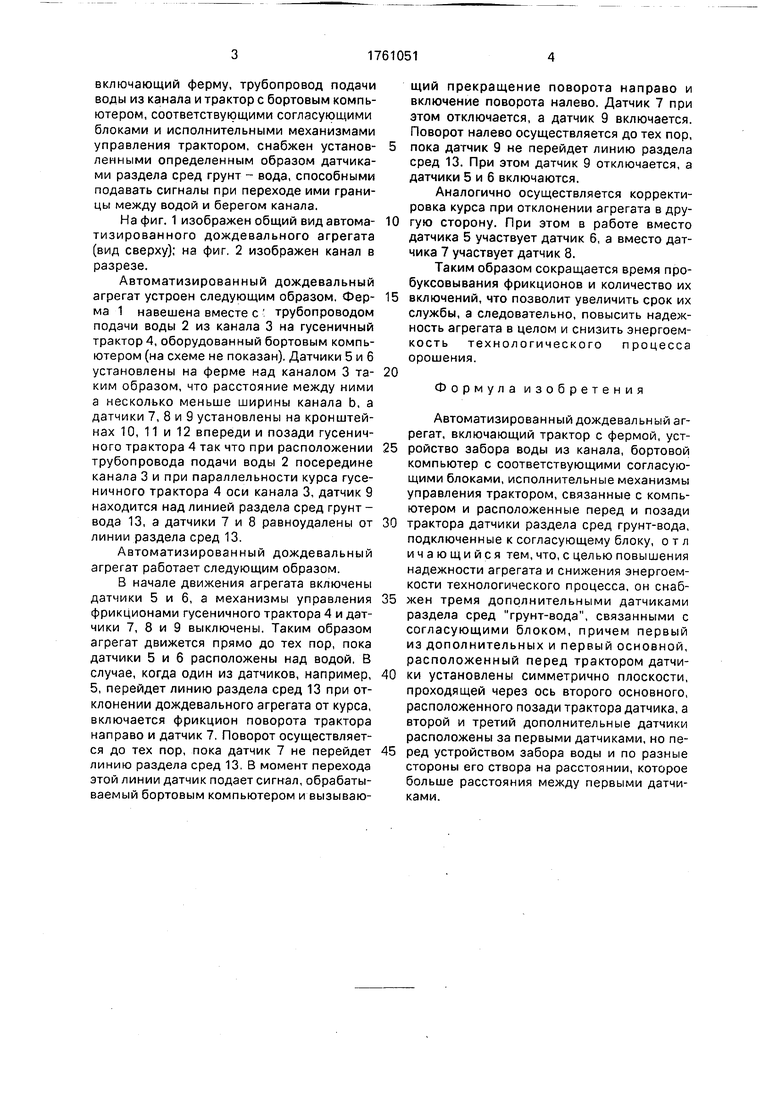
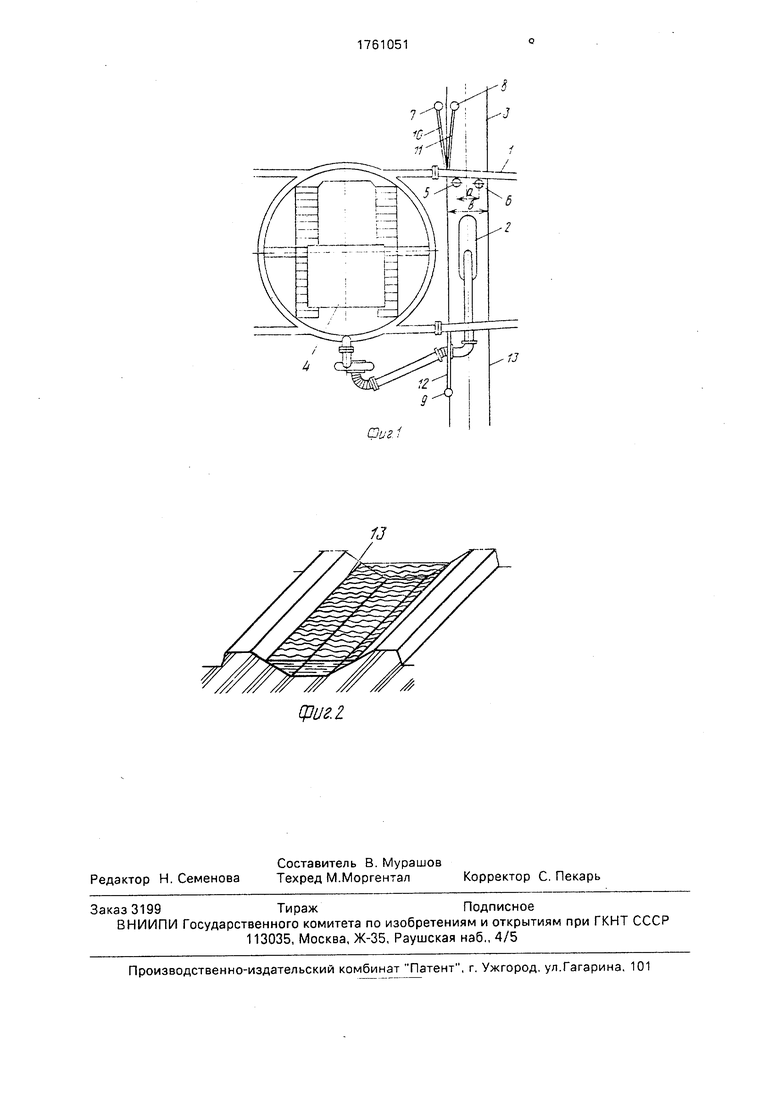
На фиг. 1 изображен общий вид автоматизированного дождевального агрегата (вид сверху); на фиг. 2 изображен канал в разрезе.
Автоматизированный дождевальный агрегат устроен следующим образом. Ферма 1 навешена вместе с трубопроводом подачи воды 2 из канала 3 на гусеничный трактор 4, оборудованный бортовым компьютером (на схеме не показан). Датчики 5 и 6 установлены на ферме над каналом 3 таким образом, что расстояние между ними а несколько меньше ширины канала b, a датчики 7, 8 и 9 установлены на кронштейнах 10, 11 и 12 впереди и позади гусеничного трактора 4 так что при расположении трубопровода подачи воды 2 посередине канала 3 и при параллельности курса гусеничного трактора 4 оси канала 3, датчик 9 находится над линией раздела сред грунт - вода 13, а датчики 7 и 8 равноудалены от линии раздела сред 13.
Автоматизированный дождевальный агрегат работает следующим образом.
В начале движения агрегата включены датчики 5 и 6, а механизмы управления фрикционами гусеничного трактора 4 и датчики 7, 8 и 9 выключены. Таким образом агрегат движется прямо до тех пор, пока датчики 5 и 6 расположены над водой, В случае, когда один из датчиков, например, 5, перейдет линию раздела сред 13 при отклонении дождевального агрегата от курса, включается фрикцион поворота трактора направо и датчик 7. Поворот осуществляется до тех пор, пока датчик 7 не перейдет линию раздела сред 13. В момент перехода этой линии датчик подает сигнал, обрабатываемый бортовым компьютером и вызывающий прекращение поворота направо и включение поворота налево. Датчик 7 при этом отключается, а датчик 9 включается. Поворот налево осуществляется до тех пор,
пока датчик 9 не перейдет линию раздела сред 13. При этом датчик 9 отключается, а датчики 5 и 6 включаются.
Аналогично осуществляется корректировка курса при отклонении агрегата в другую сторону. При этом в работе вместо датчика 5 участвует датчик 6, а вместо датчика 7 участвует датчик 8.
Таким образом сокращается время пробуксовывания фрикционов и количество их
включений, что позволит увеличить срок их службы, а следовательно, повысить надежность агрегата в целом и снизить энергоемкость технологического процесса орошения.
Формула изобретения
Автоматизированный дождевальный агрегат, включающий трактор с фермой, устройство забора воды из канала, бортовой компьютер с соответствующими согласующими блоками, исполнительные механизмы управления трактором, связанные с компьютером и расположенные перед и позади
трактора датчики раздела сред грунт-вода, подключенные к согласующему блоку, о т л ичающийся тем, что, с целью повышения надежности агрегата и снижения энергоемкости технологического процесса, он снабжен тремя дополнительными датчиками раздела сред грунт-вода, связанными с согласующими блоком, причем первый из дополнительных и первый основной, расположенный перед трактором датчики установлены симметрично плоскости, проходящей через ось второго основного, расположенного позади трактора датчика, а второй и третий дополнительные датчики расположены за первыми датчиками, но перед устройством забора воды и по разные стороны его створа на расстоянии, которое больше расстояния между первыми датчиками.
Оиг 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный дождевальный агрегат | 1988 |
|
SU1586619A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДОЖДЕВАЛЬНЫХ И ПОЛИВНЫХ АГРЕГАТОВвсЕСсюгнАя ПДТЕЙТ110-ТЕУ1Ш'{101?^ | 1972 |
|
SU327891A1 |
| Дождевальный агрегат | 1988 |
|
SU1576059A1 |
| Устройство для автоматического направления движения самоходного дождевального агрегата | 1989 |
|
SU1683573A1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА ФРОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2006 |
|
RU2334389C2 |
| ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 1998 |
|
RU2152712C1 |
| Устройство для управления мостовым сельскохозяйственным агрегатом | 1990 |
|
SU1748676A1 |
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |
| ДОЖДЕВАЛЬНЫЙ АППАРАТ | 2014 |
|
RU2587566C2 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
Изобретение относится к сельскому хозяйству и может быть использовано при орошении сельскохозяйственных культур. Целью изобретения является повышение надежности и снижение энергоемкости дождевального агрегата. Сущность; способ автоматического управления движением дождевального агрегата предусматривает контроль отклонения от курса путем подачи сигналов от датчиков к бортовому компьютеру, при этом сигналы с правого 6 и левого 5 датчиков линейного смещения фиксирующие зеркало воды в канале 3 в случае выхода датчиков 5 либо 6 из этой зоны через линию раздела сред 13, взаимодействуют в компьютере с сигналами от датчиков углового смещения 7, 8 и 9, после чего на определенный период времени включается либо левый либо правый поворот гусеничного трактора 4 2 ил. сл С
фиг.г
| Система аварийной защиты самоходной многоопорной дождевальной машины | 1985 |
|
SU1304786A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизированный дождевальный агрегат | 1988 |
|
SU1586619A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
