Предлагаемое изобретение относится к транспортным средствам с электроприводом и направлено на расширение возможностей электротранспорта, движущегося преимущественно по проводам, за счет автоматизации переключения режимов "автономный ход" - "движение по проводам" в том числе съема и установки токоприемников на провода контактной сети и переключения питания тягового двигателя.
Известно транспортное средство [1], содержащее подпружиненную штангу с токосъемной головкой, имеющее возможность поворота вокруг вертикальной и горизонтальной осей, тяговый двигатель, подключаемый переключателем (контроллером) через токосъемную головку к контактному проводу, привод штангоуловителя, соединенный тросом со штангой, и электромагнитный стопор привода, выходы которого соединены с выходом блока штангоулавливания, и индикатор напряжения (реле обесточки), вход которого подключен к токосъемной головке, а выход соединен с входом блока штангоулавливания.
Известно транспортное средство [2] , имеющее перечисленные признаки устройства [1], и содержащее дополнительный переключатель с ручным приводом, подключающий тяговый двигатель либо через токосъемную головку к контактному проводу, либо к аккумуляторной батарее. Это транспортное средство предназначено для движения как по проводам, так и в режиме автономного хода. Недостатком его является необходимость ручной установки токоприемников на провода контактной сети, что связано с выходом водителя из кабины и существенными затратами времени, что может вызвать затор на транспортных магистралях.
Известно также устройство [3], содержащее гидравлический привод подъема и опускания штанги, вертикальная ось которой связана с электромагнитной муфтой и через редуктор с электродвигателем. Эти элементы могут служить для автоматизации процесса установки токосъемников на контактные провода, однако устройство [3] обладает следующими недостатками:
1. Установка гидравлического серводвигателя, находящегося на поворотном основании штанги, при возможных углах разворота в горизонтальной плоскости до 220 град. [1] и постоянное сцепление редуктора с электродвигателем с вертикальной осью вращения штанги при значительных уровнях угловых ускорений поворота штанги приведет из-за наличия подводящих шлангов к увеличению момента сопротивления повороту, а из-за наличия дополнительных присоединенных масс - к увеличению динамических моментов. Эти факторы неизбежно приведут к увеличению вероятности отрыва токоприемника с контактного провода и снизят надежность транспортного средства из-за возможности повреждения шлангов и зависимости параметров рабочей жидкости от климатических условий.
2. Наличие электромагнитной муфты, стопорящей вертикальную ось вращения штанги на основание в момент срыва токоприемника, может увеличить аварийность в этом режиме, т.к. возможно стопорение штанги при значительных углах отклонения ее от продольной оси транспортного средства, а следовательно, контакт с другими объектами и транспортными средствами.
Задачей предлагаемого изобретения является создание электротранспортного средства с автоматизированной системой перехода на автономный ход и обратно на движение по проводам без ухудшения характеристик основного режима с максимальным использованием серийных узлов.
Поставленная задача достигается тем, что транспортное средство снабжено замкнутыми системами установки штанг с токосъемниками на провода контактной сети, причем вертикальное наведение штанги осуществляется управляемым вентилем через серийный привод штангоуловителя, а горизонтальное наведение с помощью поступательно движущейся каретки, кинематически связанной со штангой только в режиме наведения. Системы установки снабжены датчиками, задающими устройствами и элементами логики и коммутации. Кроме того, устройство снабжено приводом переключателя питания тягового двигателя.
Из рассмотренных аналогов предполагаемого изобретения [1,2,3] в качестве прототипа взято транспортное средство [2]. На фиг. 1 изображена функциональная схема прототипа, где показаны функциональные блоки и связи между ними: электрические - ординарной линией, а механические - двойной. Схема содержит штангу 1 с токосъемной головкой 2, электрически связанной с контактным проводом 3, индикатор напряжения 4, блок штангоулавливания 5, зарядное устройство 7, аккумуляторную батарею 9, переключатель 6 с ручным приводом, тяговый двигатель 8, схему ИЛИ 12 и привод штангоуловителя 10 с электромагнитным стопором 11.
Выход токосъемной головки 2 соединен со входами индикатора напряжения 4, переключателя 6 и зарядного устройства 7. Выход индикатора напряжения 4 соединен с выходом блока штангоулавливания 5, имеющего два выхода, первый из которых соединен с первым входом схемы ИЛИ, а второй - с входом привода штангоуловителя 10 и вторым входом схемы ИЛИ. Вход схемы ИЛИ 12 соединен с электромагнитным стопором 11. Привод штангоуловителя механически через трос связан со штангой 1. Выход зарядного устройства 7 соединен через аккумуляторную батарею 9 со вторым входом переключателя, а выход переключателя соединен со входом тягового двигателя 8.
Работа устройства заключается в следующем.
При движении по проводам напряжение с провода 3 подается через токосъемную головку 2 на индикатор напряжения 4, и через переключатель 6 - на тяговый двигатель 8. По команде с индикатора напряжения 4 с первого выхода блока штангоулавливания 5 подается сигнал на первый вход схемы ИЛИ 12, которая своим выходным сигналом включает электромагнитный стопор 11.
При срыве токосъемной головки с контактного провода индикатор напряжения 4 дает команду в блок штангоулавливания 5, который через свой второй выход подает сигнал на вход привода штангоуловителя 10 и второй вход схемы ИЛИ 12 для включения стопора и выключает сигнал на своем первом выходе. При этом привод 10 притягивает через трос штангу 1 к крыше транспортного средства, причем под воздействием троса и натяжной пружины штанга ориентируется в вертикальной плоскости, параллельной продольной оси транспортного средства. После этого по программе блока штангоулавливания сигнал на его втором выходе включается, привод 10 и стопор 11 отключается, а трос остается в застопоренном состоянии.
При необходимости движения в автономном ходе водитель переводит переключатель 6, запитывая тяговый двигатель 8 от аккумуляторной батареи 9. Для возобновления движения по проводам водитель выходит из кабины, вручную через трос устанавливает штангу с токосъемной головкой на контактный провод и переводит переключатель для запитки тягового двигателя от токосъемной головки.
Предполагаемое изобретение содержит несколько функционально самостоятельных систем, поэтому авторы предлагают многозвенную формулу изобретения, а описание функциональной схемы и работы устройства производится последовательно по каждой из систем.
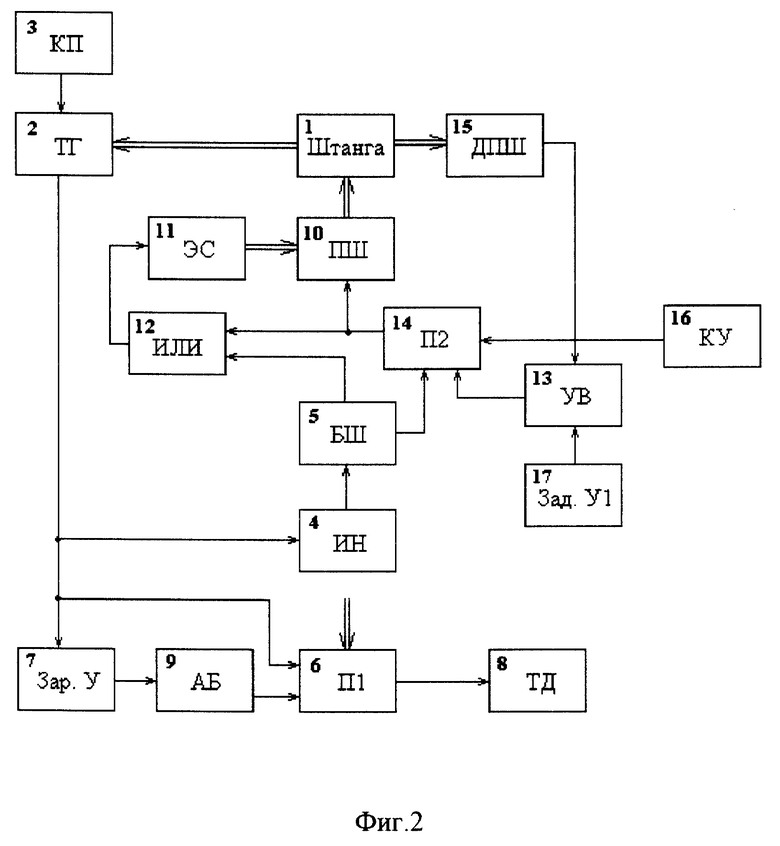
На фиг. 2 приведена функциональная схема предполагаемого изобретения по п. 1 формулы (система вертикального наведения штанги), содержащая штангу 1 с токосъемной головкой 2, провод 3, индикатор напряжения 4, блок штангоулавливания 5, переключатель 6, зарядное устройство 7, тяговый двигатель 8, аккумуляторную батарею 9, привод штангоуловителя 10, электромагнитный стопор 11, схему ИЛИ 12.
Отличительная часть устройства содержит: управляемый вентиль 13, имеющий два входа, который может представлять собой усилитель мощности, например, трансформаторный; второй переключатель 14, имеющий два входа и управляющий вход, выполненный, например, в виде контактора с переключающим контактом; датчик угла подъема штанги относительно основания 15, выполненный, например, в виде потенциометра, установленного на горизонтальной оси вращения штанги; командное устройство 16, например, в виде тумблера и первое задающее устройство 17 - элемент формирующий управляющий сигнал привода, варианты конкретных реализаций которого раскрыты в последующих пунктах формулы, причем выход второго переключателя 14 соединен с входом привода штангоуловителя 10 и вторым входом схемы ИЛИ 12, первый вход второго переключателя 14 соединен со вторым выходом блока штангоулавливания 5, второй вход второго переключателя 14 соединен с выходом управляемого вентиля 13, управляющий вход второго переключателя 14 соединен с выходом командного устройства 16, первый выход управляемого вентиля 13 соединен с выходом датчика угла 15, а второй вход управляемого вентиля 13 соединен с выходом первого задающего устройства 17.
Сущность предлагаемого устройства заключается в том, что в отличие от прототипа привод штангоуловителя может управляться не только дискретно блоком штангоулавливания, но и непрерывно управляемым вентилем в замкнутом контуре, образованном датчиком угла подъема штанги, управляемым вентилем и приводом штангоуловителя. При этом соединение входа привода штангоуловителя с управляемым вентилем осуществляется переключателем 14 по сигналу с командного устройства 16, а закон управления приводом определяется сигналом с первого задающего устройства 17. Электромагнитный стопор привода штангоуловителя 11 отстопаривает трос по сигналу логической схемы ИЛИ 12, которая срабатывает либо от сигнала с выхода переключателя 14 (режим штангоулавливания или режим наведения), либо от сигнала со второго выхода блока штангоулавливания 5 (режим движения по проводам).
Работа устройства заключается в следующем.
При движении по проводам напряжение с токосъемной головки 2 подается на индикатор напряжения 4, по сигналу которого с первого выхода блока штангоулавливания подается сигнал на схему ИЛИ 12, которая включает электромагнитный стопор 11, освобождая трос, закрепленный на штанге 1.
При срыве токосъемной головки 2 с провода 3 индикатор напряжения 4 дает команду на вход блока штангоулавливания 5, который аналогично прототипу, при наличии определенных условий сигналом со своего второго выхода включает привод штангоуловителя 10 и одновременно стопор 11. Штанга притягивается к основанию и затем стопорится (по программе блока штангоулавливания снимается напряжение с его выходов). Далее транспортное средство может переходить либо в режим автономного хода, например, для объезда неблагоприятного для прохождения участка контактной сети, либо в режим установки штанги. В последнем случае по сигналу командного устройства 16, переключатель 14 соединяет выход управляемого вентиля 13 с входом привода 10, который вместе с натяжной пружиной разворачивает штангу, вокруг горизонтальной оси до выравнивания сигналов датчика угла и задающего устройства. При появлении сигнала с управляемого вентиля 13 через второй вход схемы ИЛИ включается электромагнит 11 и расстопаривает привод на период наведения штанги.
Таким образом предложенное устройство позволяет производить подъем и опускание штанги при сохранении всех параметров штангового токоприемника в режиме движения по проводам, что устраняет недостатки известных устройств.
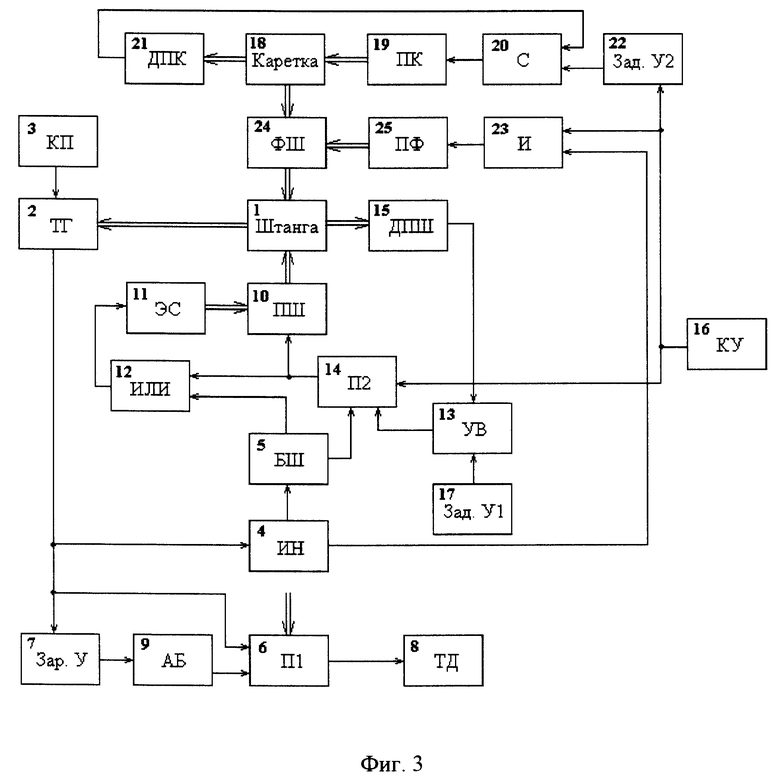
Функциональная схема устройства по второму пункту формулы изобретения (система горизонтального наведения штанги) приведена на фиг. 3.
Помимо описанных выше элементов она содержит: каретку 18, перемещаемую по направляющим перпендикулярно продольной оси транспортного средства; привод каретки 19, например, электродвигатель с редуктором и усилителем мощности; сумматор 20, имеющий два входа; датчик 21 положения каретки относительно основания, например, индукционный датчик линейных перемещений; второе задающее устройство 22, функции которого аналогичны первому, а варианты реализации раскрыты ниже; логическую схему И 23; фиксатор штанги 24, установленный на каретке, представляющий собой, например, ловушку в виде горизонтально расположенной вилки и привод фиксатора 25, например, электромагнитный, разворачивающий вилку в вертикальное положение, причем вход привода каретки 19 соединен - с выходом сумматора 20, а первый вход сумматора 20 соединен с выходом датчика положения каретки 21, второй вход сумматора 20 соединен с выходом второго задающего устройства 22, вход второго задающего устройства 22 и первый вход схемы И 23 соединены с выходом командного устройства 16, второй вход схемы И 23 соединен с выходом индикатора напряжения 4, а вход привода фиксатора 25 соединен с выходом индикатора напряжения 4, а вход привода фиксатора 25 соединен с выходом схемы И 23.
Сущность изобретения состоит в следующем. Для сохранения динамических параметров штанги при движении транспортного средства по проводам при наличии привода горизонтального наведения штанги необходимо механическое расцепление привода со штангой в этом режиме.
Поэтому авторами предложено наведение штанг осуществлять при помощи каретки, движущейся поступательно перпендикулярно продольной оси транспортного средства с помощью привода, а связь штанги с кареткой осуществлять только на период наведения. Однако в этом случае взаимное расположение штанги и каретки должно быть однозначным. Поэтому кинематическую связь штанги с кареткой предложено осуществлять в их определенном положении, а именно - в среднем положении каретки (определяемом датчиком положения каретки) и в параллельном продольной оси транспортного средства положении штанги. Реализация этого предложения осуществляется специальными фиксаторами штанг.
Работа устройства заключается в следующем. При движении по проводам каретка находится в среднем положении (сигнал со второго задающего устройства 22 не подается, а сигнал с датчика положения каретки 21 равен нулю). При случайном или принудительном срыве токоприемника работает устройство по п. 1 формулы, штанга притягивается приводом штангоуловителя к основанию, устанавливаясь под действием троса и натяжной пружины в вертикальной плоскости, параллельной продольной оси транспортного средства, и попадает в этом положении в створ фиксатора 24 штанги на каретке.
При наличии сигналов с командного устройства 16 и индикатора напряжения 4 сигналом с выхода логической схемы И 23 включается привод 25 и разворачивает фиксатор 24 в вертикальное положение, при этом штанга оказывается внутри фиксатора, т.е. осуществляется кинематическая связь штанги с кареткой. В этом состоянии вертикальное перемещение (подъем и опускание) штанги фиксатором не ограничено, а горизонтальный разворот штанги возможен только вместе с движением каретки. Командное устройство включает одновременно задающее устройство 22, сигнал с которого перемещает каретку, разворачивая штангу вокруг вертикальной оси (при этом устройство по п. 1 производит вертикальное наведение штанги). После окончания наведения по сигналу индикатора напряжения 4 либо командного устройства 16 логическая схема И 23 отключает привод фиксатора 25, фиксатор 24 опускается и кинематическая связь штанги с кареткой разрывается.
Таким образом предложенное устройство позволяет осуществлять наведение штанги вокруг вертикальной оси для установки токоприемника на провод и исключить влияние привода наведения на динамику штангового токоприемника при движении по проводам.
Устройство по третьему пункту формулы изобретения направлено на реализацию полуавтоматических систем наведения штанг транспортного средства, когда наведение токоприемников на провода производится водителем с пульта управления с визуальным контролем положения штанг через боковое зеркало или специальную видеосистему. В этом случае первое 17 и второе 22 (фиг. 3) задающие устройства предложено выполнять в виде регулируемых источников напряжения, например, потенциометрических задатчиков с ручным управлением.
Работа устройства заключается в следующем. При необходимости установки штанги на провод водитель включает командное устройство 16. При этом включается задающее устройство 22, а переключатель 14 подключает к входу привода 10 выход управляемого вентиля 13. Водитель, наблюдая за положением штанги, управляет задающими устройствами 17 и 22 и устанавливает штангу на провод.
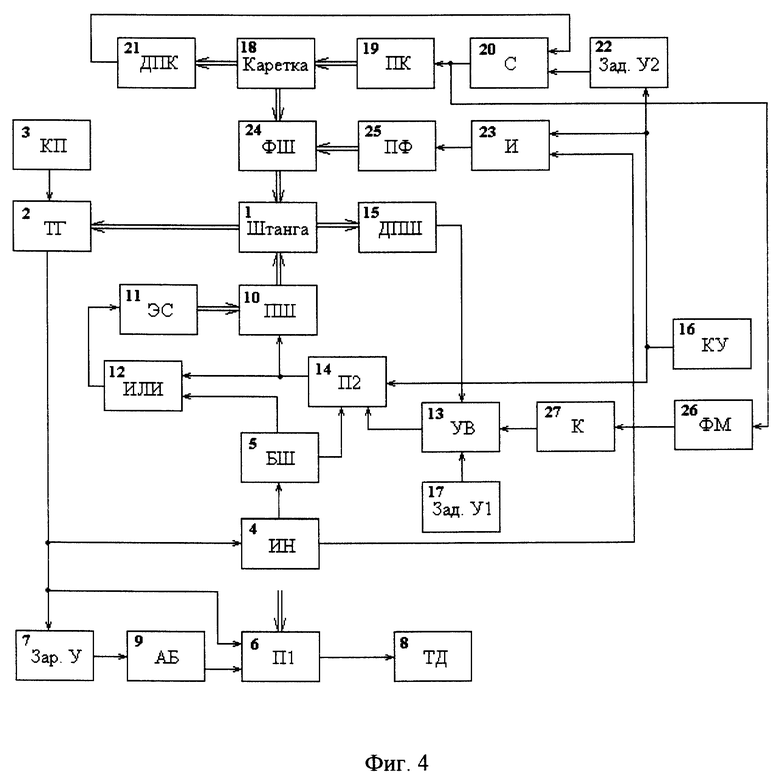
Устройство по четвертому пункту формулы изобретения отличается тем, что реализует систему автоматического наведения токоприемников транспортного средства на провода. Функциональная схема устройства приведена на фиг. 4. Помимо рассмотренных выше элементов она содержит формирователь модуля 26 и компаратор 27. Управляемый вентиль 13 снабжен третьим входом, а второе задающее устройство 22 выполнено в виде датчика, например оптикоэлектронного, положения транспортного средства относительно контактного провода, причем вход формирователя модуля 26 соединен с выходом сумматора 20, выход формирователя модуля 26 соединен с входом компаратора 27, а выход компаратора 27 соединен с третьим входом управляемого вентиля 13.
Сущность предлагаемого устройства заключается в том, что входной сигнал привода каретки (разность сигналов задающего устройства 22 и датчика положения каретки 21) будет пропорционален отклонению штанги от провода. Поэтому привод каретки по этому сигналу будет автоматически устанавливать штангу под контактный провод.
Работа устройства заключается в следующем. При случайном или принудительном срыве токосъемной головки с контактного провода и попадании штанги в фиксатор 24 (п. 2 формулы) включение командного устройства 16 повлечет за собой включение привода фиксатора 25 и оптического датчика 22. Привод каретки 19 начнет перемещать каретку, обнуляя сигнал с выхода сумматора 20, а следовательно модуль этого сигнала на выходе формирователя модуля 26. При нулевой или заданной по уровню величине этого сигнала, что означает установку штанги под провод, включается компаратор 27 и подает сигнал на третий вход управляемого вентиля 13, который приводом штангоуловителя поднимает штангу к контактному проводу.
Таким образом предложенное устройство позволяет использовать системы наведения штанг по п.п.1,2 для автоматической установки токоприемника на провод контактной сети.
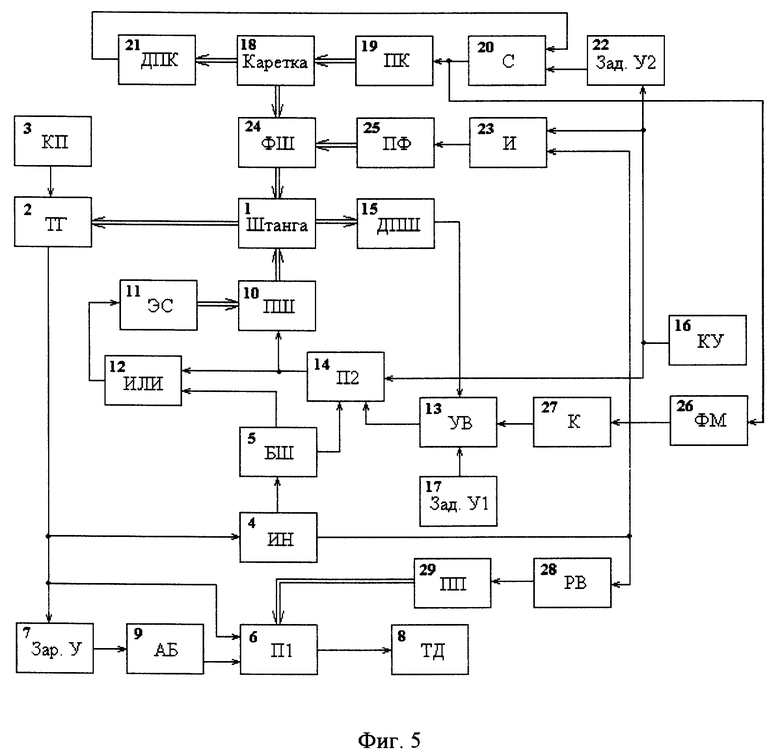
Функциональная схема устройства по п. 5 формулы приведена на фиг. 5. Помимо рассмотренных элементов она содержит реле времени 28 и привод первого переключателя, например шаговый, который включается по сигналу реле времени, запускаемому индикатором напряжения 4, причем вход реле времени 28 соединен с выходом индикатора напряжения 4, а выход реле времени 28 соединен с входом привода первого переключателя 29.
Сущность предлагаемого устройства состоит в том, что при отключении транспортного средства от контактной сети, которое фиксирует индикатор напряжения 4, на время, превышающее установку реле времени 28, включается привод 29, переключателя 6, переводя последний в положение, когда тяговый двигатель 8 подключен к аккумуляторной батарее 9.
Таким образом устройство позволяет обеспечивать автоматически переход транспортного средства на режим автономного хода.
Источники информации
1. Вишняк Г. В. и др. Троллейбус пассажирский ЗиУ-682В. М.: Транспорт, 1977.
2. Министерство автомобильной промышленности СССР, ОКР 452231, Троллейбусы пассажирские ЗиУ-683В экспортные модификации. Руководство по эксплуатации 682-В-3902004 РЭ, книги 1,2 (прототип).
3. Авт.св. 770869, кл. B 60 L 5/16, 1978 г. Авторы: Чучунов А.А. Паштала А.С., Мильштейн Л.Л., Борзова Н.С. "Токоприемник".
Изобретение предназначено для использования на транспортных средствах с электроприводом от контактной сети и возможностью передвижения от автономного источника энергии. Экобус содержит блок штангоулавливания, имеющий электромагнитный стопор, привод штангоуловителя для установки штанг на провода. Привод соединен со штангой тросом. Экобус также имеет управляемый вентиль, переключатели, датчик угла подъема штанги относительно основания, командное устройство, задающие устройства. Первый вход управляемого вентиля соединен с выходом датчика угла, а второй вход - с выходом первого задающего устройства. Выходы управляемого вентиля и блока штангоулавливания связаны с приводом штангоуловителя через соответствующий переключатель. Управляющий вход последнего соединен с выходом командного устройства. Имеется горизонтальный привод перемещения штанг. Задающие устройства могут быть выполнены в виде регулируемых источников напряжения. Предусмотрена установка датчика положения транспортного средства относительно контактного провода. При отключении транспортного средства от контактной сети или пропадании напряжения, превышающем уставку реле времени, включается привод переключателя, устанавливая режим автономного хода. Техническим результатом является улучшение характеристик основного режима и автоматизация перехода на автономный ход и обратно. 4 з.п.ф-лы 5 ил.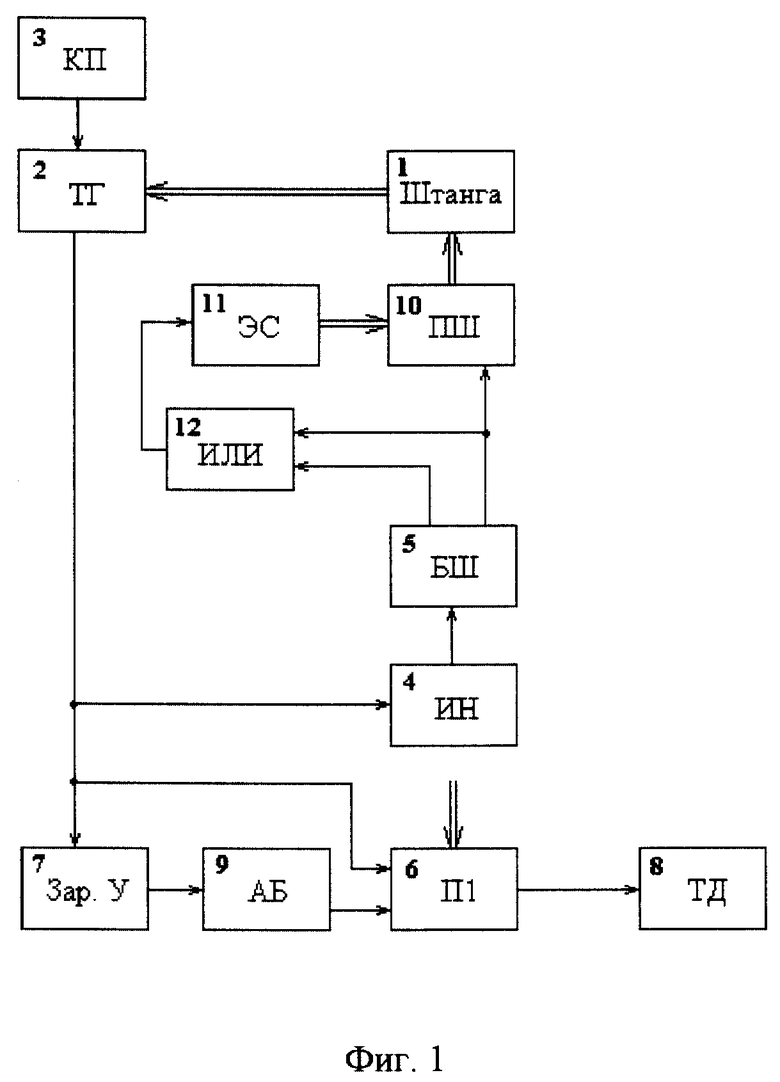
| ТОКОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ТРОЛЛЕЙНОГО ТРАНСПОРТНОГО СРЕДСТВА С АВТОНОМНОЙ ДИЗЕЛЬ-ГЕНЕРАТОРНОЙ УСТАНОВКОЙ | 1988 |
|
RU2028216C1 |
| Воздухораспределитель | 1982 |
|
SU1078207A1 |
| RU 9418703/11 A1, 27.11.1996 | |||
| Подшипник для осевых букс | 1924 |
|
SU1585A1 |
| RU 2070857 C1 27.12.1996 | |||
| Контрастное вещество для визуализации перфузии миокарда | 2012 |
|
RU2629840C2 |
| Тяговый электропривод | 1989 |
|
SU1652123A1 |

