Изобретение относится к подъемно-транспортному оборудованию, в частности к механизму фиксации положения захватных рычагов.
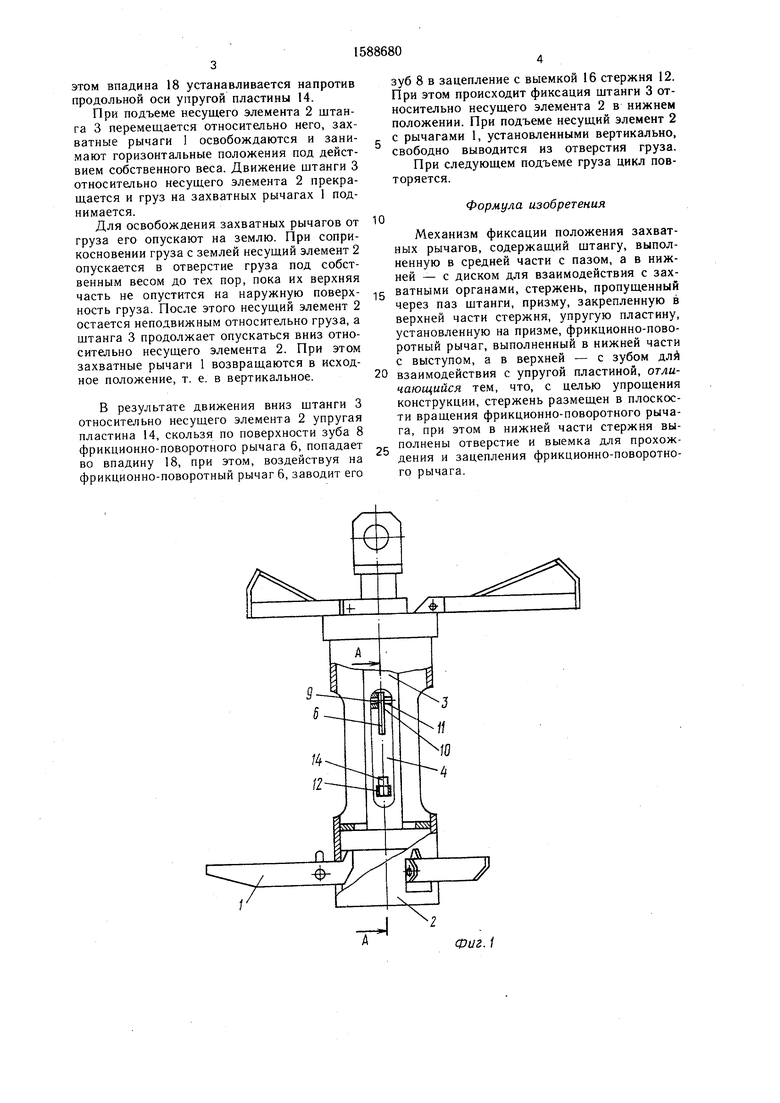
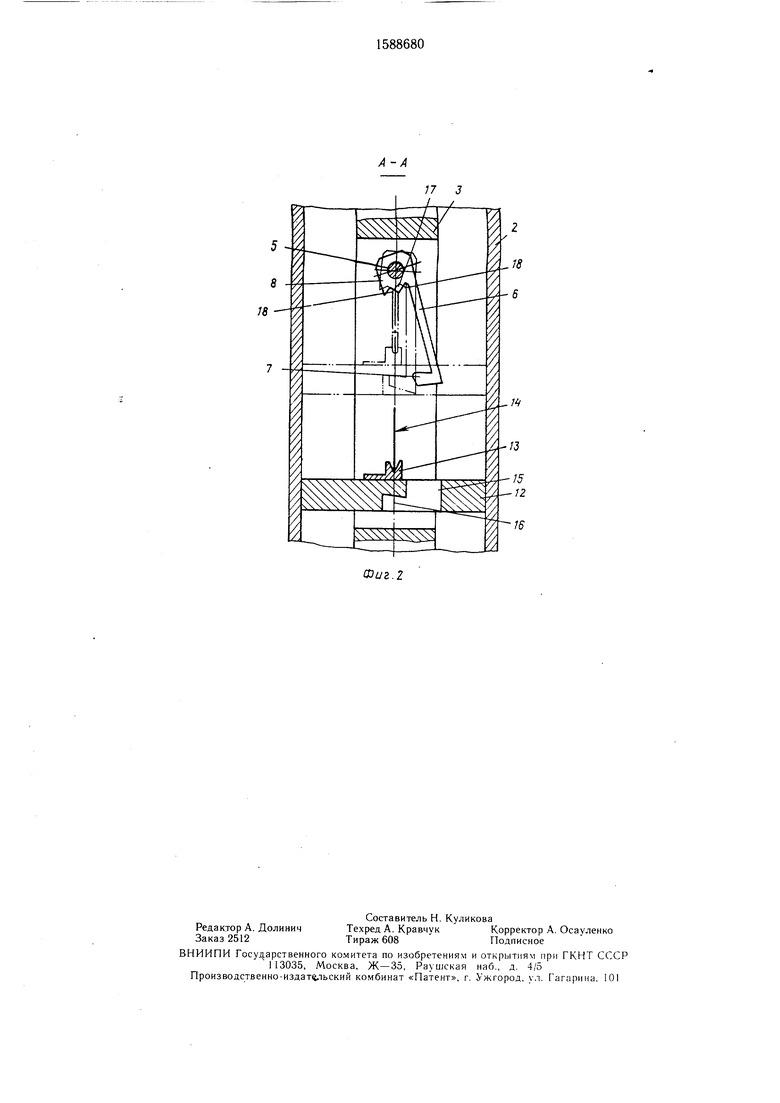
На фиг. 1 изображен механизм фиксации, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Механизм фиксации положения захватных рычагов 1, шарнирно прикрепленных к несущему элементу 2, содержит расположенную в полости несущего элемента 2 штангу 3 со сквозным пазом 4. В пазу 4 при помощи шпильки 5 установлен фрикционно- поворотный рычаг 6 с выступом 7 в нижней части и зубом 8 в верхней части. Фрик- ционно-поворотный рычаг 6 зафиксирован на щпильке 5 при помощи втулки 9, щайбы 10 и пружины сжатия 11.
В несущем элементе 2 установлен стержень 12, расположенный в пазу 4 щтанги 3. К стержню 12 жестко закреплена призма 13, на которой установлена упругая пластина 14.
Кроме того, в стержне 12 выполнено отверстие 15 и образована выемка 16 для обеспечения зацепления выступа 7 фрикционно- поворотного рычага 6. Зуб 8 имеет на своем участке выступы 17 и впадины 18.
Устройство работает следующим образом.
Для захвата груза происходит опускание несущего элемента 2, при этом штанга 3 находится в нижнем положении относительно несущего элемента 2, захватные рычаги 1 находятся в закрытом положении. Выступ 7 рычага 6 находится в зацеплении с выемкой 16 стержня 12, а впадина 18 зуба 8 расположена напротив упругой пластины 14. При контакте верха несущего элемента 2 с поверхностью груза он остается неподвижным, а щтанга 3 продолжает опускаться под действием собственного веса. При этом упругая пластина 14 скользит по плоскости зуба 8. Попадая во впадину 18, она выводит выступ 7 фрикцяонно-поворотного рычага 6 из зацепления с выемкой 16 стержня 12. При
сд
00 00
о
00
этом впадина 18 устанавливается напротив продольной оси упругой пластины 14.
При подъеме несущего элемента 2 штанга 3 перемещается относительно него, захватные рычаги 1 освобождаются и мают горизонтальные положения под действием собственного веса. Движение штанги 3 относительно несуш,его элемента 2 прекра- ш.ается и груз на захватных рычагах 1 поднимается.
Для освобождения захватных рычагов от груза его опускают на землю. При соприкосновении груза с землей несущий элемент 2 опускается в отверстие груза под собственным весом до тех пор, пока их верхняя
зуб 8 в зацепление с выемкой 16 стержня 12. При этом происходит фиксация штанги 3 относительно несущего элемента 2 в нижнем положении. При подъеме несущий элемент 2 с рычагами 1, установленными вертикально, свободно выводится из отверстия груза. При следующем подъеме груза цикл повторяется.
Формула изобретения
Механизм фиксации положения захватных рычагов, содержащий щтангу, выполненную в средней части с пазом, а в нижней - с диском для взаимодействия с зах10
венным весом до тех пор, пока ил ИСПАНИИnvn «..х.....- «-.- часть не опустится на наружную поверх- g ватными органами, стержень, пропущенный часть не uiiyi.iniL.« vyjrJ ib„гтянги. поизму. закрепленную в
ность груза. После этого несущий элемент 2 остается неподвижным относительно груза, а штанга 3 продолжает опускаться вниз относительно несущего элемента 2. При этом захватные рычаги 1 возвращаются в исходное положение, т. е. в вертикальное.
В результате движения вниз щтанги 3 относительно несущего элемента 2 упругая пластина 14, скользя по поверхности зуба 8
через паз щтанги, призму, закрепленную в верхней части стержня, упругую пластину, установленную на призме, фрикционно-пово- ротный рычаг, выполненный в нижней части с выступом, а в верхней - с зубом дли 20 взаимодействия с упругой пластиной, отличающийся тем, что, с целью упрощения конструкции, стержень размещен в плоскости вращения фрикционно-поворотного рычага, при этом в нижней части стержня выфр икцио нно-по воротного рыч4га 6, попадает „ полнены отверстие и выемка для прохож- во впадину 18, при этоК, воздействуя на 5 дения и зацепления фрикционно-поворотно- фрикционно-поворотный рычаг 6, заводит егого рычага.
зуб 8 в зацепление с выемкой 16 стержня 12. При этом происходит фиксация штанги 3 относительно несущего элемента 2 в нижнем положении. При подъеме несущий элемент 2 с рычагами 1, установленными вертикально, свободно выводится из отверстия груза. При следующем подъеме груза цикл повторяется.
Формула изобретения
Механизм фиксации положения захватных рычагов, содержащий щтангу, выполненную в средней части с пазом, а в нижней - с диском для взаимодействия с зах10
nvn «..х.....- «-.- g ватными органами, стержень, пропущенный ib„гтянги. поизму. закрепленную в
g ватными органами, стержень, пропущенный ib„гтянги. поизму. закрепленную в
через паз щтанги, призму, закрепленную в верхней части стержня, упругую пластину, установленную на призме, фрикционно-пово- ротный рычаг, выполненный в нижней части с выступом, а в верхней - с зубом дли 20 взаимодействия с упругой пластиной, отличающийся тем, что, с целью упрощения конструкции, стержень размещен в плоскости вращения фрикционно-поворотного рычага, при этом в нижней части стержня вы„ полнены отверстие и выемка для прохож- 5 дения и зацепления фрикционно-поворотно- го рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм фиксации положения захватных органов | 1987 |
|
SU1507717A1 |
| Трелевочная каретка | 1983 |
|
SU1156944A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| УПРУГАЯ КОЛЫБЕЛЬ, ИМЕЮЩАЯ НЕСУЩУЮ РАМУ | 2007 |
|
RU2416351C2 |
| Грузозахватное устройство | 1982 |
|
SU1049410A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1982 |
|
SU1126525A1 |
| Захватная балка для маневрирования гидротехническими затворами с выдвижными штангами | 1978 |
|
SU732440A1 |
| ФИКСАТОР АППАРАТА ВНЕШНЕЙ ФИКСАЦИИ ОТЛОМКОВ КОСТЕЙ КОНЕЧНОСТЕЙ И/ИЛИ ТАЗА | 2024 |
|
RU2837971C1 |
| УПРУГАЯ КОЛЫБЕЛЬ | 2007 |
|
RU2415631C2 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - упрошение конструкции. Механизм фиксации положения захватных рычагов содержит несущий элемент 2, внутри которого установлена с возможностью перемещения штанга 3, имеющая сквозной паз. В пазу установлен фрикционно-поворотный рычаг 6 с выступом 7 в нижней части и зубом 8 в верхней. В несущем элементе установлен стержень 12, проходящий в пазу штанги 3. На стержне жестко закреплена упругая пластина 14, взаимодействующая с зубом 8, и имеются отверстие 15 и выемка 16 для зацепления выступа 7. 2 ил.
Фиг. 1
18
16
| Механизм фиксации положения захватных органов | 1987 |
|
SU1507717A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
