(Л
3150
3 при помощи шпильки 5 установлен по- воротньш рьмаг 6 с выступом 7 и зубом 8., В несущем элементе 1 установлен палец 12, расположенный в пазу 4. К пальцу 12 при помощи стоек 13 прикреплена призма 14, на которой установлена пластина 15, хвостовик 16 которой соединен через пружину 17 с пальцем 12. При нахождении штанги 2 в нижнем положении относительно несущего элемента 1 (захватные органы находятся в сведенном положении) рычаг 6 выступом 7 находится в зацеплении с пальцем 12, После того, как несу- щий элемент займет неподвижное поло-
жение (.в результате упора его в поверхность .груза), штанга 2 продолжает движение вниз. При этом пластина 15, скользя по наклонной поверхности зуба 8, поворачивает рычаг 6, выводя , последний из зацепления с пальцем 12, в результате чего штанга 2 освобождается и перемещается вверх (разводя захватные органы). После транспортировки груза штанга 2 движется вниз (сводя захватные органы), до зацепления выступа 7 рычага 6 с пальцем . 12, т.е. осуществляется фиксация нижнего положения штанги (сведение захватных органов). 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм фиксации положения захватных рычагов | 1988 |
|
SU1588680A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Грузозахватное устройство | 1982 |
|
SU1049410A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для изделий с отверстием | 1982 |
|
SU1119965A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Механизм управления захватными органами грузозахватного устройства | 1983 |
|
SU1137055A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Грузозахватное устройство | 1984 |
|
SU1221175A2 |
Изобретение относится к подъемно-транспортному оборудованию , в частности, к механизмам фиксации положения захватных органов. Цель изобретения - повышение удобства эксплуатации. Механизм фиксации положения захватных органов содержит расположенную в полости несущего элемента 1 штангу 2, в средней части которой выполнены сквозные пазы 3 и 4. В пазу 3 при помощи шпильки 5 установлен поворотный рычаг 6 с выступом 7 и зубом 8. В несущем элементе 1 установлен палец 12, расположенный в пазу 4. К пальцу 12 при помощи стоек 13 прикреплена призма 14, на которой установлена пластина 15, хвостовик 16 которой соединен через пружину 17 с пальцем 12. При нахождении штанги 2 в нижнем положении относительно несущего элемента 1 (захватные органы находятся в сведенном положении) рычаг 6 выступом 7 находится в зацеплении с пальцем 12. После того, как несущий элемент займет неподвижное положение (в результате упора его в поверхность груза), штанга 2 продолжает движение вниз. При этом пластина 15, скользя по наклонной поверхности зуба 8, поворачивает рычаг 6, выводя последний из зацепления с пальцем 12, в результате чего штанга 2 освобождается и перемещается вверх (разводя захватные органы). После транспортировки груза штанга 2 движется вниз (сводя захватные органы) до зацепления выступа 7 рыгача 6 с пальцем 12, т.е. осуществляется фиксация нижнего положения штанги (сведение захватных органов). 3 ил.
Изобретение относится к подъемно- транспортному оборудованию, в частности к механизмам фиксации положения захватных органов.
Цель изобретения - повышение удобства эксплуатации.
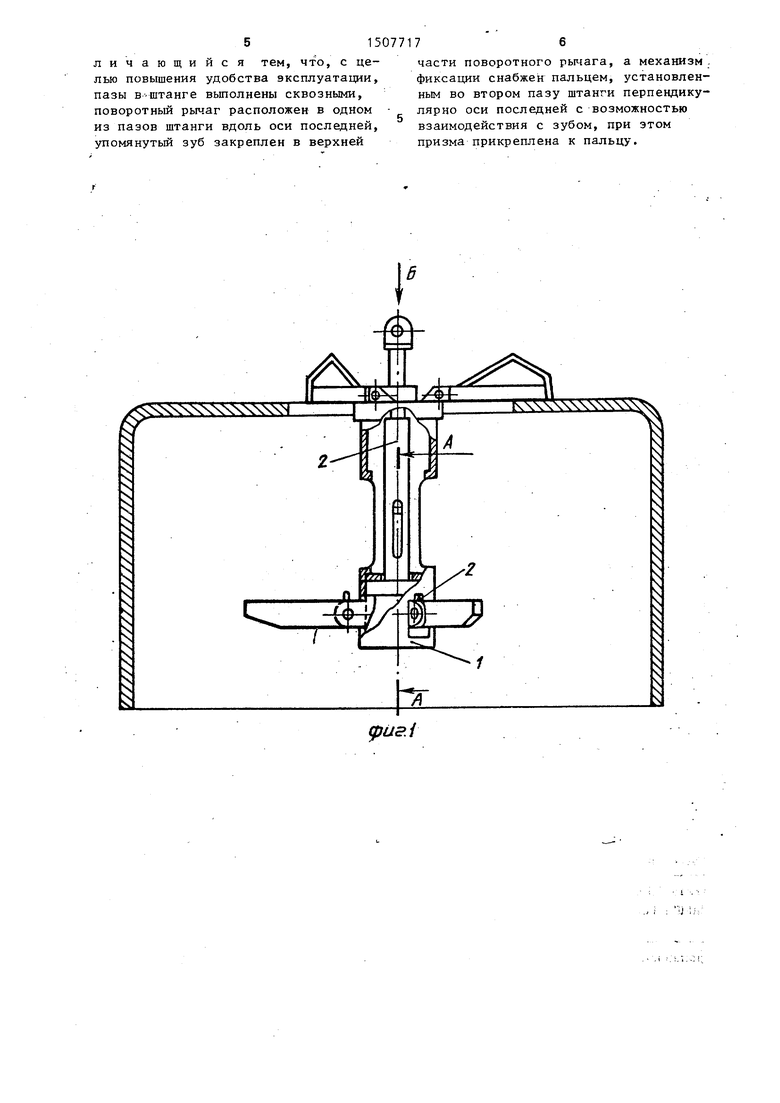
На фиг. 1 изображено грузозахватное устройство, вид; на фиг. 2 механизм фиксации, разрез; на.фиг.3 то же, вид сбоку.
Механизм фиксации, положения захватных органов, шарнирно прикрепленных к несущему элементу 1, содержит расположенную в полости несущего эле- мента 1 штангу 2, в средней части которой выполнены сквозные пазы 3 и 4. В пазу 3 при помощи шпильки 5 установлен поворотный рычаг 6 с выступом 7 и зубом 8. Рычаг 6 зафиксирован в пазу 3 при помощи втулки 9 шайбы 10 и пружины 11 сжатия,
В несущем элементе 1 установлен, палец 12, расположенный в пазу 4 штанги 2. К пальцу 12 при помощи сто ек 13 прикреплена призма 14, на которой установлена пластина 15. Пластина 15 имеет хвостовик 16, пропущенны через отверстие 17 призмы 14. При этом хвостовик соединен пружиной 18 с пальцем 12. Между зубом 8 и пласти ной 15 имеется зазор, обеспечивающий зацепление и расцепление рычага 6 с пальцем 12. При .нахождении штанги 2 в нижнем положении относительно не- сущего элемента 1 (захватные органы находятся в сведенном положении) рычаг 6 находится в зацеплении выступом 7 с пальцем 12.
После того, как несущий элемент 1 займет неподвижное положение, в результате упора его в поверхность груза, штанга 2 продолжает движение вниз под действием собственного веса. При этом пластина 15 скользит по наклонной поверхности зуба 8, что приводит к повороту рйчага 6, который выходит из зацеплейия с пальцем 12, в результате чего штанга 2 освобождается и перемещается вверх до разведения захватных органов. После транспортировки груза несущий элемент 1 снова занимает неподвижное положение а штанги 2 перемещается относительно не.го вниз, сводя захватные органы. В результате указанного движения штанги 2 палец с установленными на нем призмой 14 и подпружиненной пластиной 15 приближается к зубу 8 настолько что пластина 15 воздействует на его наклонную поверхность, поворачивая рычаг 6 до зацепления-его выступа 7 с пальцем 12. При этом штанга 2 фиксируется относительно несущего элемента 1 в нижнем положении.
Формула изобретения
Механизм фиксации положения захватных органов, содержащий штангу, . вьшолненную в средней части с диаметрально расположенными пазами, а в нижней - с диском для взаимодействия с захватными органами, поворотный ры- чаг, выполненный в нижней части с -выступом, призму, подпружиненную пластину, установленную на призме, зуб дЛй взаимодействия с пластиной, о т51507717
личающийся тем, что, с целью повышения удобства эксплуатации, пазы в-штанге выполнены сквозными, поворотный рычаг расположен в одном - из пазов штанги вдоль оси последней, упомянутый зуб закреплен в верхней
6
части поворотного рычага, а механизм фиксации снабжен пальцем, установленным во втором пазу штанги перпендикулярно оси последней с возможностью взаимодействия с зубом, при этом призма прикреплена к пальцу.
gjuai
in
It
15
| Автоматический захват для изделий с отверстием | 1987 |
|
SU1449518A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
