Изобретение относится к механическому оборудованию гидротехнических сооружений, а именно к навесному оборудованию кранов, обслуживающих затворы гидротехнических сооружений. Известна полуавтоматическая захватная балка для опускания и подъема гидротехнических затворов, у которой захватный орган выполнен в виде поворотного стержня с захватной поперечиной у нижнего конца. Верхний конец стержня оканчивается диском, на котором закреплен вертикальный штырь, взаимодействующий с двумя горизонтальными штырями поворотного сектора. На сектор воздействует шарнирно установленный рычаг с противовесом. При подготовке захватного органа к операциям зацепления или расцепления оператор взводит рычаг с противовесом, перебрасывая его, в зависимости от выполняемой операции, в одну или другую сторону относительно сектора, после чего стопорит вертикальный стержень в одном из крайних положений. При опускании балки на заданную глубину стопорное устройство срабатывает, освобождая взведенный рычаг. Последний, под действием противовеса, поворачивается сам и поворачивает на 90° вертикальный стержень, обеспечивая зацепление или расцепление балки с затвором в зависимости от того, на какую операцию был настроен захват 1. Недостаток такой балки заключается в том, что оператор вручную должен взводить рычаг с грузом или перебрасывать его из стороны в сторону. С увеличением грузоподъемности захватной балки увеличивается вес захватного органа, возрастает усилие, необходи.мое для поворота стержня, следовательно, возрастает и вес противовеса. Настройка такого захвата на выполняемую операцию требует затраты значительного времени и больших физических усилий. Известна также автоматическая захватная балка для опускания и подъема затворов гидротехнических сооружений, у которой захватный орган выполнен в виде поворотного стержня, снабженного на нижнем конце захватной поперечиной. В корпус подвески захватной балки ввернут винт с несамотормозящейся резьбой, на нижней грани которого расположен торцевой храповик, взаимодействующий с выступающим вертикальным штырем, закрепленным на верхней головке поворотного стержня.
При опускании захватной балки на затвор захватная поперечина входит в продолговатое отверстие затвора, после чего стержень с помощью винта, вращающегося под действием собственного веса балки, поворачивается на 90°. При подъеме захватной балки (с затвором или без него) винт под действием своего собственного веса опускается вниз, при этом он поворачивается на 90° в исходное положение для возможности выполнения очередной операции 2.
Балка имеет существенные конструктивные недостатки, приводящие к ненадежной работе:
поскольку КПД винтовой пары в основном зависит от коэффициента трения, незначительные изменения его величины, зависящие от многих неучитываемых факторов (вагустенание или выщелачивание смазки, коррозия, попадание пыли, изменение влажности воздуха и выпадение росы на элементах балки при суточных перепадах температур и т.д.), могут привести к тому, что несамотормозящая передача может стать самотормозящей, при опускании захватной балки на затвор вес подвески окажется недостаточным для поворота стержня с захватной поперечиной, при этом невозможно будет осуществить операцию зацепления или расцепления;
по этой же причине при подъеме захватной балки винт может не опуститься под действием собственного веса в нижнее положение с аналогичным предыдущему, недостатку результатом;
перекос и застревание затвора в пазах при опускании могут привести к срабатыванию захвата и самопроизвольному автоматическому расцеплению балки с затвором, после чего затвор может сорваться и упасть. Известна также автоматическая захватная балка с клещевым захватом, содержащая металлоконструкцию с тяговыми подвесками и захватный орган в виде двух щарнирно установленных клешней, запорного элемента и управляющего рычага. На одном конце управляющего рычага жестко закреплен противовес, а между противовесом и запорным элементом установлен выдвижной упор. При подготовке захватной балки к операции зацепления выдвижной упор предварительно задвигают, при этом он не взаимодействует со щтангой затвора, что позволяет запорному элементу зафиксировать клещни в закрытом положении. При подготовке захватной балки к операции расцепления упор предварительно выдвигают, при этом он, взаимодействуя со щтангой затвора, взводит управляющий рычаг с противовесом, который затем выводит запорный элемент из контакта с верхними концами клещней 3.
Недостатком такой балки является необходимость подготовительных операций по настройке захватного органа на зацепление и расцепление.
Цель предлагаемого изобретения - повышение производительности труда путем устранения остановок на ручную переналадку балки для выполнения операций зацепления и расцепления.
Указанная цель достигается тем, что балка снабжена вспомогате аьным рычагом, установленным на оси, имеющим на одном конце противовес, а на другом - подпружиненный щтырь, причем один конец управляющего рычага имеет направляющие для подпружиненного щтыря, одна из которых выполнена в виде скоса, а вторая - в виде фигурного паза.
Кроме того, запорный элемент жестко закреплен на другом конце управляющего рычага.
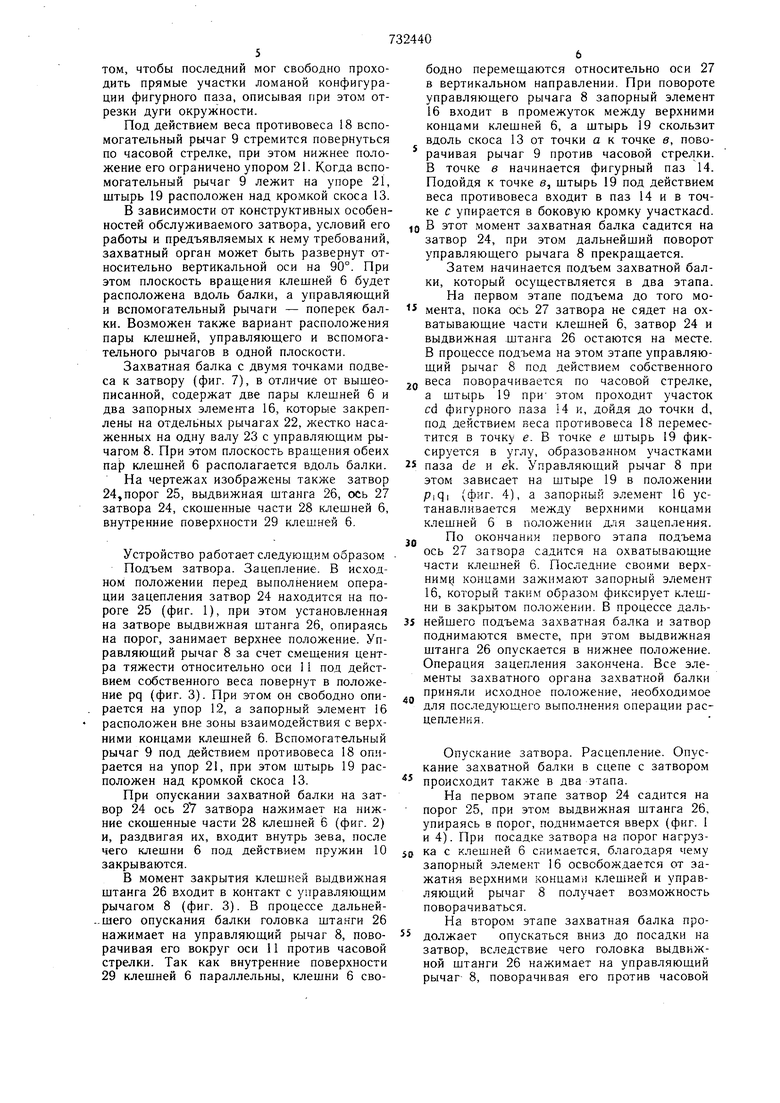
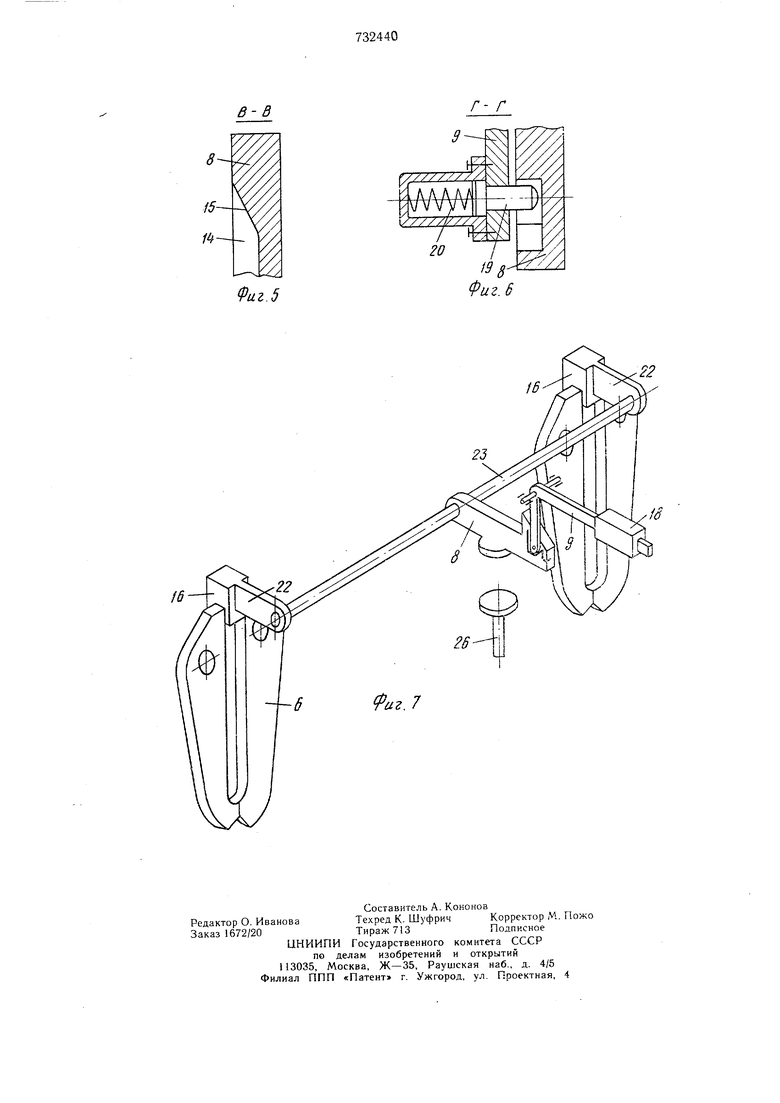
На фиг. 1 изображена захватная балка в сцепе с затвором, вид спереди; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - разрез Б-Б фиг. 2 (захватный орган в открытом положении (; на фиг. 4 - то же (захватный орган в закрытом положении); на фиг. 5 - сечение В-В фиг. 3 (профиль перехода фигурного паза к боковой поверхности рычага); на фиг. 6 - сечение Г-Г фиг. 4 (конструкция подпружиненного штыря); на фиг. 7 - схема захватного органа для захватной балки с двумя точками подвеса к затвору.
Захватная балка с одной точкой подвеса к затвору содержит раму 1, на которой размещены направляющие катки 2, тяговые подвески 3 присоединены к подвескам 4 подъемного крана. Захватный орган 5 состоит из двух клещней 6, вращающихся на осях 7, управляющего рычага 8 и вспомогательного рычага 9. Верхние концы клещней 6 оттянуты пружинами 10. Под действием этих пружин в исходном положении клещни нормально закрыты.
Управляющий рычаг 8 щарнирно установлен на оси 11. Под действием собственного веса управляющий рычаг стремится повернуться по часовой стрелке, при этом нижнее положение его ограничено упором 12. На одном конце управляющего рычага 8 выполнены скос 13 и фигурный паз 14, конфигурация которого показана на фиг. 3 и 4. Начало фигурного паза 14 соединено со скосом 13, а конец его имеет плавный переход 15 к боковой поверхности рычага 8. На другом конце управляющего рычага закреплен запорный элемент 16.
Вспомогательный рычаг 9 щарнирно установлен на оси 17. На одном конце вспомогательного рычага 9 закреплен противовес 18, а на другом установлен подвижный щтырь 19, головка которого поджата пружиной 20. Штырь 19 в процессе операций зацепления и расцепления взаимодействует со скосом 13 и фигурным пазом 14 управляющего рычага. Ширина паза 14 выполнена больще диаметра щтыря 19 с таким расчетом, чтобы последний мог свободно проходить прямые участки ломаной конфигурации фигурного паза, описывая при этом отрезки дуги окружности. Под действием веса противовеса 18 вспомогательный рычаг 9 стремится повернуться по часовой стрелке, при этом нижнее положение его ограничено упором 21. Когда вспомогательный рычаг 9 лежит на упоре 21, штырь 19 расположен над кромкой скоса 13. В зависимости от конструктивных особенностей обслуживаемого затвора, условий его работы и предъявляемых к нему требований, захватный орган может быть развернут относительно вертикальной оси на 90°. При этом плоскость вращения клешней 6 будет расположена вдоль балки, а управляюш,ий и вспомогательный рычаги - поперек балки. Возможен также вариант расположения пары клешней, управляющего и вспомогательного рычагов в одной плоскости. Захватная балка с двумя точками подвеса к затвору (фиг. 7), в отличие от вышеописанной, содержат две пары клешней 6 и два запорных элемента 16, которые закреплены на отдельных рычагах 22, жестко насаженных на одну валу 23 с управляющим рычагом 8. При этом плоскость вращения обеих па{) клещней б располагается вдоль балки. На чертежах изображены также затвор 24, порог 25, выдвижная штанга 26, ось 27 затвора 24, скошенные части 28 клешней 6, внутренние поверхности 29 клешней 6. Устройство работает следующим образом Подъем затвора. Зацепление. В исходном положении перед выполнением операции зацепления затвор 24 находится на пороге 25 (фиг. 1), при этом установленная на затворе выдвижная штанга 26, опираясь на порог, занимает верхнее положение. Управляющий рычаг 8 за счет смещения центра тяжести относительно оси I1 под действием собственного веса повернут в положение pq (фиг. 3). При этом он свободно опирается на упор 12, а запорный элемент 16 расположен вне зоны взаимодействия с верхними концами клешней 6. Вспомогательный рычаг 9 под действием противовеса 18 опирается на упор 21, при этом штырь 19 расположен над кромкой скоса 13. При опускании захватной балки на затвор 24 ось 27 затвора нажимает на нижние скощенные части 28 клешней 6 (фиг. 2) и, раздвигая их, входит внутрь зева, после чего клешни 6 под действием пружин 10 закрываются. В момент закрытия клешней выдвижная щтанга 26 входит в контакт с управляющим рычагом 8 (фиг. 3). В процессе дальней-шего опускания балки головка штанги 26 нажимает на управляющий рычаг 8, поворачивая его вокруг оси 11 против часовой стрелки. Так как внутренние поверхности 29 клешней 6 параллельны, клешни 6 свободно перемещаются относительно оси 27 в вертикальном направлении. При повороте управляющего рычага 8 запорный элемент 16 входит в промежуток между верхними концами клешней 6, а штырь 19 скользит вдоль скоса 13 от точки а к точке в, поворачивая рычаг 9 против часовой стрелки. В точке в начинается фигурный паз 14. Подойдя к точке в, штырь 19 под действием веса противовеса входит в паз 14 и в точке с упирается в боковую кромку участкасё. В этот момент захватная балка садится на затвор 24, при этом дальнейший поворот управляющего рычага 8 прекращается. Затем начинается подъем захватной балки, который осуществляется в два этапа. На первом этапе подъема до того момента, пока ось 27 затвора не сядет на охватывающие части клешней 6, затвор 24 и выдвижная щтанга 26 остаются на месте. В процессе подъема на это.м этапе управляющий рычаг 8 под действием собственного веса поворачивается по часовой стрелке, а штырь 19 при этом проходит участок cd фигурного паза 14 и, дойдя до точки d, под действием веса противовеса 18 переместится в точку е. В точке е штырь 19 фиксируется в углу, образованно.м участками паза de и ek. Управляюший рычаг 8 при этом зависает на штыре 19 в положении piQi (фиг. 4), а запорный элемент 16 устанавливается между верхними концами клешней 6 в положении для зацепления. По окончании первого этапа подъема ось 27 затвора садится на охватывающие части клешней 6. Последние своими верхнищ конца.ми зажимают запорный элемент 16, который таким образом фиксирует клешни в закрытом положении. В процессе дальнейшего подъема захватная балка и затвор поднимаются вместе, при этом выдвижная штанга 26 опускается в нижнее положение. Операция зацепления закончена. Все элементы захватного органа захватной балки приняли исходное положение, необходимое для последующего выполнения операции расцепления. Опускание затвора. Расцепление. Опускание захватной балки в сцепе с затворо.м происходит также в два этапа. На первом этапе затвор 24 садится на порог 25, при этом выдвижная щтанга 26, упираясь в порог, поднимается вверх (фиг. 1 и 4). При посадке затвора на порог нагрузка с клешней 6 снимается, благодаря чему запорный эле.мект 16 освобождается от зажатия верхними концами клешней и управляющий рычаг 8 получает возможность поворачиваться. На втором этапе захватная балка продолжает опускаться вниз до посадки на затвор, вследствие чего головка выдвижной штанги 26 нажимает на управляющий рычаг 8, поворачивая его против часовой стрелки. При этом штырь 19 проходит участок ek фигурного паза 14 и, дойдя до точки k, под действием веса противовеса 18 перемещается в точку т. В точке m штырь 19 упирается в боковую кромку участка тп. В этот момент захватная балка садится на затвор и второй этап опускания заканчивается. Затем начинается подъем захватной балки. На первом этапе подъема до того момента, пока ось 27 затвора не дойдет до охватываюш.их частей клешней 6, управляющий рычаг 8 поворачивается под действием собственного веса по часовой стрелке и садится на упор 12. Запорный элемент 16 при этом выходит из зоны взаимодействия с верхними концами клещней. В процессе поворота управляющего рычага 8 штырь 19 сначала проходит участок шп фигурного паза 14, затем участок по плавного перехода 15, после чего выходит на боковую поверхность рычага. При этом он утапливается, сжимая пружину 20, скользит по боковой поверхности рычага от точки о к точке а, пока не достигает кромки скоса 13. Оказавшись над кромкой скоса, штырь 19 выталкивается пружиной 20. В этот момент вспомогательный рычаг 9 садится на упор 21, На втором этапе подъема захватной балки ось 27 затвора нажимает на охватывающие части клешней 6 и, раздвигая их, выходит из зева. Клешни 6 под действием пружины 10 закрываются. Все элементы захватного органа захватной балки принимают исходное положение, необходимое для последующего выполнения операции зацепления. В процессе опускания затвора возможен его перекос и застревание в пазах. Однако самопроизвольного расцепления при этом не произойдет, так как выдвижная штанга 26 остается в нижнем положении и не может взаимодействовать с управляющим рычагом 8 для выполнения переключающих движений. Наличие вспомогательного рычага, установленного на оси и имеющего на одном конце противовес, а на другом - подпружиненный штырь, взаимодействующий с направляющими в виде скоса и фигурного паза, выполненными на одном конце управляющего рычага, причем на другом конце управляющего рычага жестко закреплен запорный элемент, позволяет повысить производительность труда при маневрировании гидротехническими затворами путем устранения остановок на переналадку балки для выполнения операций зацепления и расцепления, а также дает возможность сократить количество обслуживающего персонала и повычить безопасность труда. Формула изобретения 1. Захватная балка для маневрирования гидротехническими затворами с выдвижными щтангами, содержащая раму с тяговыми подвесками и захватным органом, выполненным в виде двух шарнирно установленных клещней и установленного на оси управляющего рычага, взаимодействующего с выдвижной щтангой, отличающаяся тем, что, с целью повышения производительности труда путем устранения остановок на ручную переналадку балки для выполнения операций зацепления и расцепления, она снабжена вспомогательным рычагом, установленным на оси, имеющим на одном конце противовес, а на другом - подпружиненный штырь, причем один конец управляющего рычага имеет направляющие для подпружиненного штыря, одна из которых выполнена в виде скоса, а вторая - в виде фигурного паза. Балка по п. , отличающаяся тем, что запорный элемент жестко закреплен на другом конце управляющего рычага. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 114541, кл. В 66 С 1/10, 1958. 2.Авторское свидетельство СССР № 129133, кл. Е 02 В 7/36, 1959. 3.Авторское свидетельство СССР № 541770, кл. В 66 С 1/66, 1974.
Фиг.5