Изобретение относится к канатному трано- порту и может быть использовано для транспортировки вагонеток по рельсовым путям с небольшим уклоном на предгфнятиях угольной, горнорудной и других отраслей промышленности.
Цель изобретения - Г овьп11ение надежности.
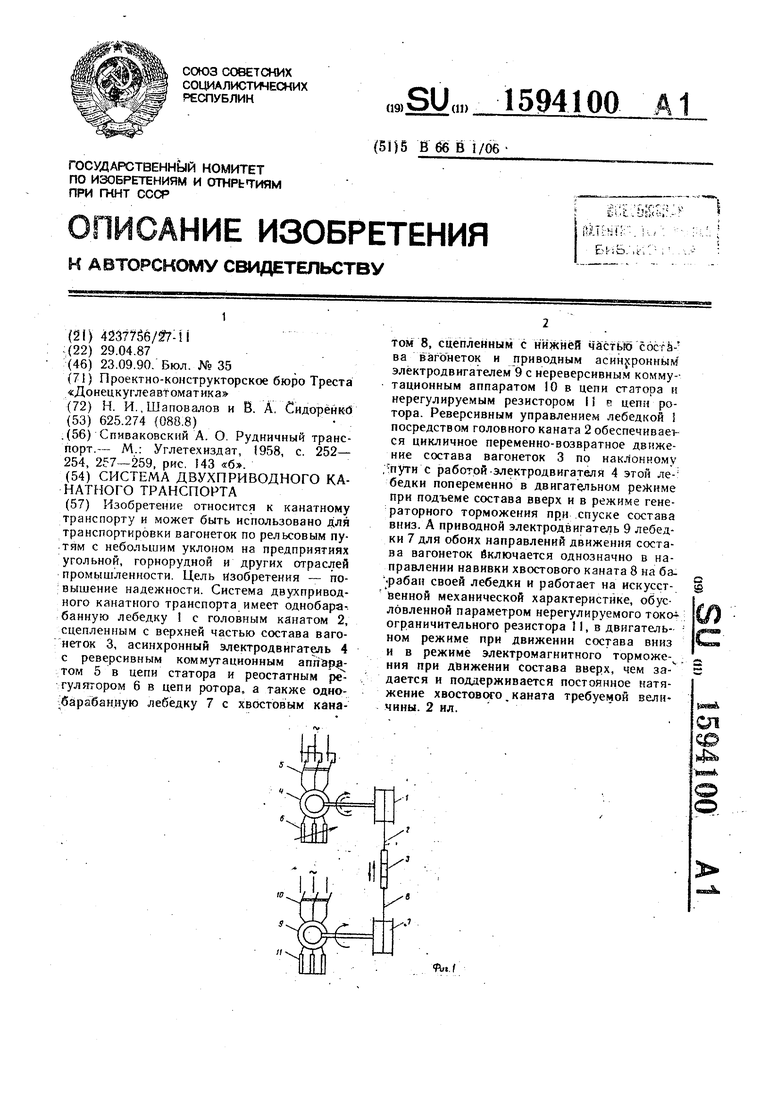
На фиг. изображена схема двухпри- водного канатного транспорта; на фиг. 2 - совмещенные механические характеристики электроприводов системы.
Предлагаемая система двухприводного канатного транспорта имеет однобарабанную лебедку 1 с головным канатом 2, сцепленным с верхней частью составв вагонеток 3, приводной, например асинхронный электродвигатепь 4 с реверсивным коммутационным аппаратом 5 в цепи статора, и реостатным регулятором 6 в цепи ротора, а также однобарабанную.лебедку 7 с хвосто- . вым канатом 8, сцепленным с нижней частью состава вагонеток и приводным асинхронным электродвигателем 9 с нереверсивным коммутационным аппаратом 10 в цепи стдто- ра и нерегулируемым резистором 11. в цепи ротора..
Зависимость электромагнитного момента М от скольжения S у приводного электро- двигагеля лебедки 1 выражена естественной механической характеристикой 12 генераторного режима для одного направления движения и естественной механической характеристикой 13 двигательного режима для другого направления движения, а у приводного электродвигателя лебедки 7 - естественной механической характеристикой 14 и искусственной механической характеристикой 15 для обоих направлений движения.
Система работает следующим образом. Для спуска состава вагонеток 3 по наклон10
и механического тормоза лебедки i (механический тормоз не показан) система замедляется и останавливается, после чего коммутационными аппаратами 5 и 10 электродвигатели обеих лебедск отключаются. В этом цикле усилие натяжения хвостового каната поддерживается достаточным для компенсации механических сопротивлений, препятствующих самопроизвольному движению состава вагонеток по наклонному пути.
Для подъема состава вагонеток 3 по наклонному пути вверх другим положениегл включения реверсивного коммутациориюго
15 аппарата 5 электродвигателю 4 привода лебедки I задается направление вращения в сторону навивки головного каната 2 на барабан лебедки, а электродвигатель 9 лебедки 7, как и в предыдущем цикле, своим нереверсивным коммутационным аппара - том 10 включается в направлении навивки хвостового каната 8 на барабан лебедки. Разгон системы до максимальной рабочей скорости здесь также управляется посредством реостатного регулятора 6 в цени
25 ротора электродвигателя 4 лебедки 1, а максимальная скорость обусловлена механической характеристикой электродвигатетя этой лебедки в двигатепьном режиме работы с активной нагрузкой на головном канате от массы состава вагонеток н на30 тяжения хвостового каната, создаваемого лебедкой 7, приводной электродвигатель 9 которой работает в режиме электромагнитного торможения (в режиме противовклю- .чения). Замедление и остановка системы в конце цикла аналогичны предыдущему цик- 35 лу спуска состава вагонеток вниз. Уси- лие натяжения хвостового каната в этом цикле поддерживается достаточным для удержания от самокатного набегания состава вагонеток на головной канат при экстренному пути вниз одним из положений вклю- 40 ° торможении лебедки 1.
чения реверсивного коммутационного аппарата 5 электродвигателю 4 привода лебедки 1 задается направление вращения в сторону свивки головного каната 2 с барабана лебедки. Одновременно нереверсивным коммутационным аппаратом 10 электродвигатель 9 привода лебедки 7 включается в направлении навивки х,остового каната 8 на барабан этой лебедки. Затем реостат-, ным регулятором 6 пусковое сопротивление в цепи ротора электродвигателя 4 выводитНа совмещенных механических характеристиках электроприводов описанная работа системы канатного транспорта фу1 кциональ- но представлена тем, что при спуске соста- ва вагонеток 3 вниз на максимальной скорости совместная работа кинематически связанных электродвигателей обеих лебедок определяется точкой а (показано без учета изменяющихся нагрузок от массы состава вагонеток), когда электродвигатель 4 рабоО Ц СИГ If J t Jlja Jtll l 1 ,lJ J 11 Cl 1 л1 и 1 1JVJ-/J,H 1f-rt ,- -..-... . -.- - . ,. - ..
СЯ и под действием нагрузки на голов- тает на механической характеристике 2 в ге.нераторном режиме, а электродвигатель 9 с естественной характеристикой 14 работает
ном канате от массы состава вагонеток и натяжения хвостового каната лебедка 1 разгоняется до максимальной рабочей скорости, обусловленной механической характерис.нераторном режиме, а электродвигатель 9 с естественной характеристикой 14 работает
1 в двигательном режиме на искусственной ха рактеристике 15, обусловленной параметром
тикой приводного электродвигателя 4 этой gg нерегулируемого токоограничительного- ре
лебедки, например, в режиме генераторного торможения. Б конце цикла спуска состава вагонеток посредством реостатного регулятора 6 электродвигателя 4
- зистора 11 в цепи ротора со скольже нием , заданным скоростным режимом работы электродвигателя 4. Период замед ления и остановки системы в этом цикле
и механического тормоза лебедки i (механический тормоз не показан) система замедляется и останавливается, после чего коммутационными аппаратами 5 и 10 электродвигатели обеих лебедск отключаются. В этом цикле усилие натяжения хвостового каната поддерживается достаточным для компенсации механических сопротивлений, препятствующих самопроизвольному движению состава вагонеток по наклонному пути.
Для подъема состава вагонеток 3 по наклонному пути вверх другим положениегл включения реверсивного коммутациориюго
аппарата 5 электродвигателю 4 привода лебедки I задается направление вращения в сторону навивки головного каната 2 на барабан лебедки, а электродвигатель 9 лебедки 7, как и в предыдущем цикле, своим нереверсивным коммутационным аппаратом 10 включается в направлении навивки хвостового каната 8 на барабан лебедки. Разгон системы до максимальной рабочей скорости здесь также управляется посредством реостатного регулятора 6 в цени
ротора электродвигателя 4 лебедки 1, а максимальная скорость обусловлена механической характеристикой электродвигатетя этой лебедки в двигатепьном режиме работы с активной нагрузкой на головном канате от массы состава вагонеток н натяжения хвостового каната, создаваемого лебедкой 7, приводной электродвигатель 9 которой работает в режиме электромагнитного торможения (в режиме противовклю- .чения). Замедление и остановка системы в конце цикла аналогичны предыдущему цик- лу спуска состава вагонеток вниз. Уси- лие натяжения хвостового каната в этом цикле поддерживается достаточным для удержания от самокатного набегания состава вагонеток на головной канат при экстренНа совмещенных механических характеристиках электроприводов описанная работа системы канатного транспорта фу1 кциональ- но представлена тем, что при спуске соста- ва вагонеток 3 вниз на максимальной скорости совместная работа кинематически связанных электродвигателей обеих лебедок определяется точкой а (показано без учета изменяющихся нагрузок от массы состава вагонеток), когда электродвигатель 4 рабоf-rt ,- -..-... . -.- - . ,. - ..
тает на механической характеристике 2 в ге тает на механической характеристике 2 в ге.нераторном режиме, а электродвигатель 9. с естественной характеристикой 14 работает
1 в двигательном режиме на искусственной характеристике 15, обусловленной параметром
нерегулируемого токоограничительного- ре
зистора 11 в цепи ротора со скольжением , заданным скоростным режимом работы электродвигателя 4. Период замедления и остановки системы в этом цикле
отражен отрезком ав искусственной характеристики 15 электродвигателя 9.
При подъеме состава вагонеток вверх на максимальной скорости совместная работа электродвигателей обеих лебедок определяе р- ся точкой в, когда электродвигатель 4 работает на механической характеристике 13 в двигательном режиме, а электродвигатель 9 работает в режиме электромагнитного, торможения на искусственной характеристике 15 со скольжением , заданным скоростным режимом работы электродвигателя 4. Период замедления и остановки си- .стемы в этом цикле отражен отрезком вб искусственной характеристики 15 электро- двигателя 9.
Формула изобретения Система двухприводного канатного трано- порта, содержащая две расположенные на .разном уровне однобарабанные лебедки, верхняя из которых выполнена реверсив- ной, два каната, одни концы которых свя заны с барабаном соответствующей лебедки, а другие концы закреплены на противоположных концах состава вагонеток, ог- личающаяся тем, что, с целью повыщения надежности, привод нижней лебедки выполнен в виде асинхронного нереверсивного электродвигателя с ротором, вращающимся в сторону навивки каната, для работы в режиме двигателя при спуске состава вагонеток и в режиме динамического тормоза при подъеме вагонетки.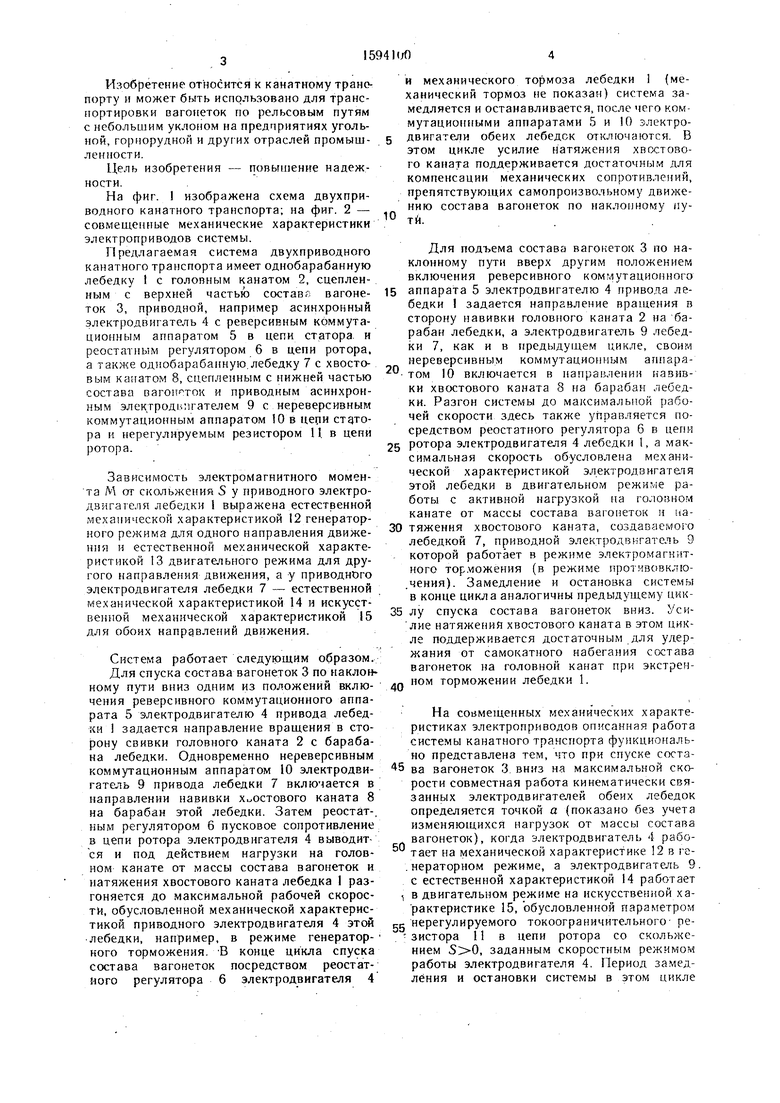

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДЗЕМНОЙ РАЗРАБОТКИ МОЩНЫХ И КРУТОПАДАЮЩИХ ЗАЛЕЖЕЙ КАЛИЙНЫХ РУД | 2013 |
|
RU2540736C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ | 1994 |
|
RU2119055C1 |
| Транспортная система | 1990 |
|
SU1729859A1 |
| УСТРОЙСТВО СОВМЕЩЕННОГО ЭЛЕКТРИЧЕСКОГО ТОРМОЗА И ЭЛЕКТРОПРИВОДА ПОДАЧИ ДОЛОТА ДЛЯ БУРОВОЙ ЛЕБЕДКИ | 2002 |
|
RU2222490C1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1969 |
|
SU238941A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Подвесная канатная дорога | 1981 |
|
SU1022843A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| СНАБЖЕННАЯ БАРАБАННОЙ ЛЕБЕДКОЙ ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА С УСТРОЙСТВОМ КОНТРОЛЯ КАНАТА | 2016 |
|
RU2719509C1 |
Изобретение относится к канатному транспорту и может быть использовано для транспортировки вагонеток по рельсовым путям с небольшим уклоном на предприятиях угольной, горнорудной и других отраслей промышленности. Цель изобретения - повышение надежности. Система двухприводного канатного транспорта имеет однобарабанную лебедку 1 с головным канатом 2, сцепленным с верхней частью состава вагонеток 3, асинхронный электродвигатель 4 с реверсивным коммутационным аппаратом 5 в цепи статора и реостатным регулятором 6 в цепи ротора, а также однобарабанную лебедку 7 с хвостовым канатом 8, сцепленным с нижней частью состава вагонеток и приводным асинхронным электродвигателем 9 с нереверсивным коммутационным аппаратом 10 в цепи статора и нерегулируемым резистором 11 в цепи ротора. Реверсивным управлением лебедкой 1 посредством головного каната 2 обеспечивается цикличное переменно-возвратное движение состава вагонеток 3 по наклонному пути с работой электродвигателя 4 этой лебедки попеременно в двигательном режиме при подъеме состава вверх и в режиме генераторного торможения при спуске состава вниз. А приводной электродвигатель 9 лебедки 7 для обоих направлений движения состава вагонеток включается однозначно в направлении навивки хвостового каната 8 на барабан своей лебедки и работает на искусственной механической характеристике, обусловленной параметром нерегулируемого токоограничительного резистора 11, в двигательном режиме при движении состава вниз и в режиме электромагнитного торможения при движении состава вверх, чем задается и поддерживается постоянное натяжение хвостового каната требуемой величины. 2 ил.