(54) УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВ МЕЖДУ СУДАМИ В МОРЕ В УСЛОВИЯХ КАЧКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Устройство траверзной передачи груза | 1984 |
|
SU1240680A1 |

I
Изобретение относится к судостроению, в частности к устройствам для передачи грузов между судами в море в условиях качки.
Известно устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с электродвигателями постоянного тока, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью каната, а также электронный узел управления режимом работы электродвигателей 1.
Недостаток известного устройства - большие затраты электроэнергии.
Цель изобретения - уменьшение затрат электроэнергии.
Поставленная цель достигается тем, что электронный узел управления режимом работы электродвигателей содержит два датчика натяжения ветвей каната, входы которых связаны с тяговыми лебедками, два тиристорных преобразователя, выходы которых подключены к первому и второму электродвигателям соответственно, два усилителя натяжения в ветвях каната, выходы которых
подключены ко входам первого и второго тиристорных преобразователей соответственно, два сумматора, выходы которых подключены ко входам первого и второго усилителей, натяжения соответственно, усилитель сигналов перемеш,ения грузовой тележки с двумя выходами, подключенными ко входам первого и второго сумматоров соответственно, а такж задатчики сигналов натяжения в ветвях каната и сигналов перемещения грузовой тележки, причем выходы датчиков натяжения и задатчик сигналов натяжения
10 подключены ко входам первого и второго сумматоров соответственно, а задатчик сигналов перемещения грузовой тележки связан со входом усилителя сигналов перемещения грузовой тележки.
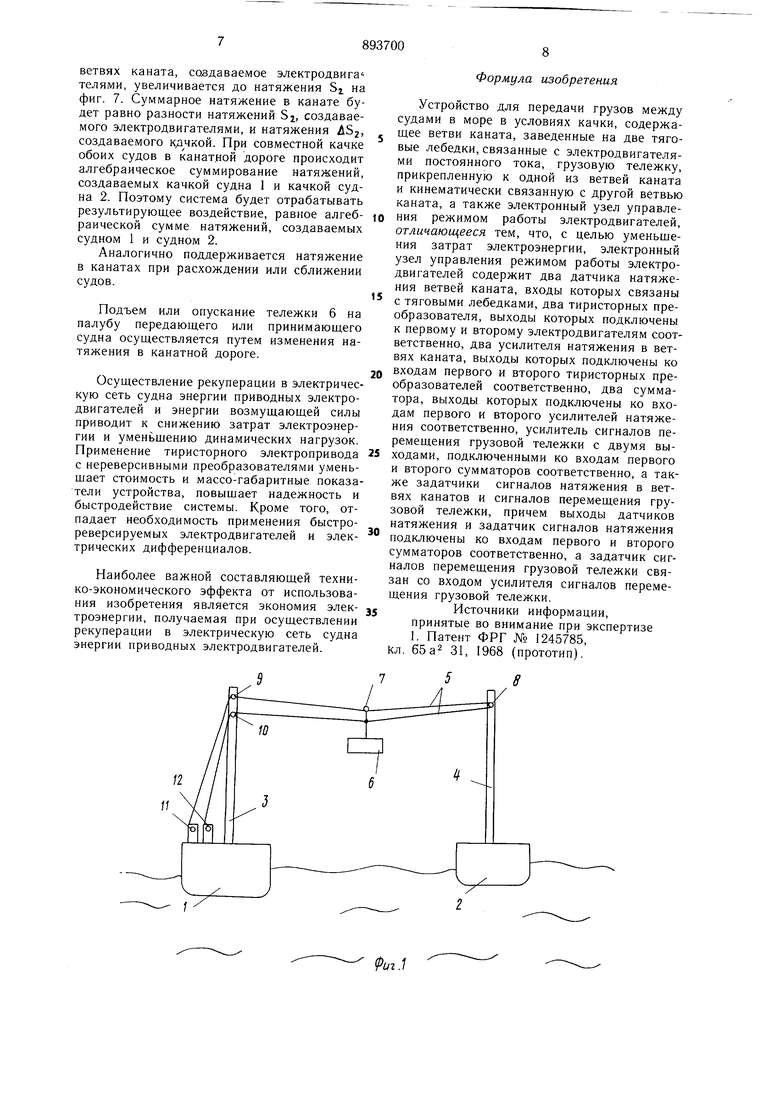
На фиг. 1 дана кинематическая схема
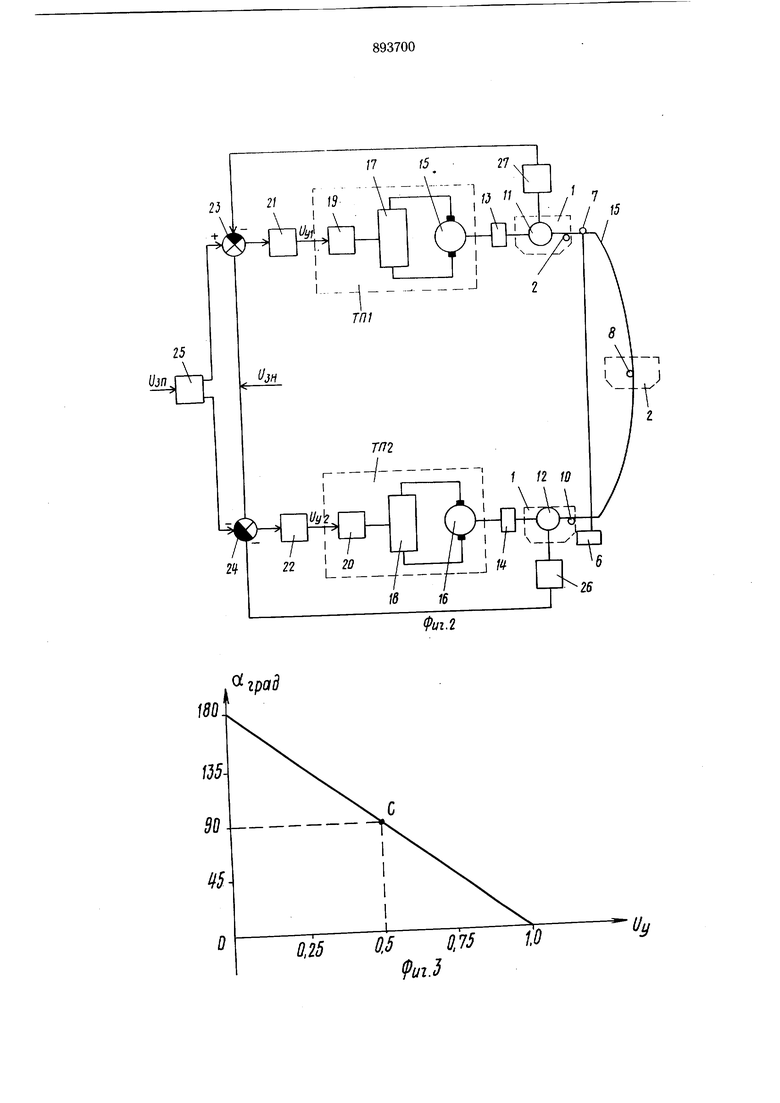
15 устройства; на фиг. 2 - функциональная схема устройства; на фиг. 3 - зависимость угла открывания тиристоров силовой схемы от напряжения управления, подаваемого на вход cncfeMbi импульсно-фазового управления (СИФУ); на фиг. 4 - регулировочная
30 характеристика тиристорных преобразователей; на фиг. 5 - механические характеристики электродвигателей при вьшолнении
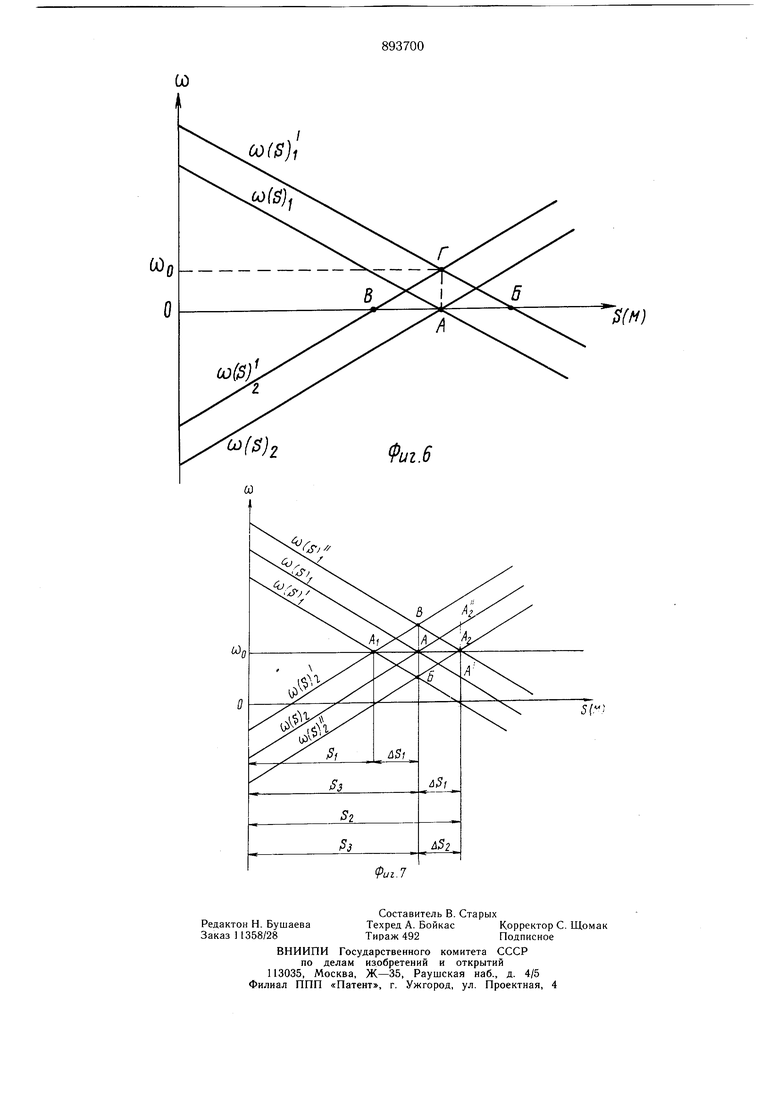
оперяцмо ьагяжеиия каната; на фиг. 6 - ;v)e.aifn:ieci i e характеристики электродвигателей (рн выполнении операции перемещения тележки; на фиг. 7 - механические характеристики электродвигателей при отработке качки.
Устройство для передачи груза между передающим еуд.ном 1 и принимающим судном 2 содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, соединенной с блоком 7 (перемещающимся по верхней ветви каната 5) и жестко связанной с нижней ветвью каната, петля которого огибает блок 8 на мачте 4 принимающего судна 2. Два конца, огибаю1цие блоки 9 и 10 на мачте 3 передающего судна 1, соединены с тяговыми лебедками 11 и 12. Тяговые лебедки 11 и 12 через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 постоянного тока. Последние подключены к тиристорным преобразователям ТП1 и ТП2, которые состоят из силовых схем 17 и 18 и систем 19 и 20 импульсно-фазового управления. Сигналы управления тиристорными преобразователями U, , Ujj подаются с выходов усилителей 21 и 22 натяжения. На сумматоры 23 и 24 этих усилителей подаются сигнал задания натяжения Ujj,, выходные сигналы усилителя 25 перемещения и сигналы обратных связей по натяжению датчиков 26 и 27. Входным сигналом усилителя 25 является сигнал задания перемещения грузовой тележки.
В качестве усилителей натяжения используются операционные усилители, а в качестве усилителя перемещения - парафазный операционный усилитель. Для задания сигналов натяжения и перемещения (U и УЗР задатчиков) используются бесконтактные сельсины, работающие в трансформаторно.м режиме. В качестве датчиков натяжения используются тензорезисторы.
Устройство работает следующим образом
В исходном состоянии сигналы управления Uyj и Uu.j тчристорными преобразователями состав тяет 0,5 от номинального значения, а углы открывания тиристоров равны 90° (рабочая точка С на фиг. 3). Напряжения тиристорных преобразователей равны нулю (фиг. 4), и электродвигатели неподвижны.
Для выполнения операции установления заданного натяжения каждый из электродвигателей 15 и 16 включается для работы в сторону «Выбирать. При этом подается сигнал натяжения Uj на сумматоры 23 и 24 и далее на усилители 21 и 22 натяжения (фиг. 2). Сигналы управления Uu( , Uyj на выходе усилителей 21 и 22 натяжения увеличиваются, что приводит к уменьщению угла открывания тиристоров сидовых схем 17 и 18. На зажимах электродвигателей 15 и 16 появляется напряжение, величина которого определяется регулировочной характеристикой преобразователей (фиг. 4); электродвигатели начинают вращаться и выбирают слабину ветвей каната. При подаче на сумматоры 23 и 24 одного и того же сигнала электродвигатели 15 и 16 будут работать по одинаковым механическим характеристикам (прямые uJ(S) 1 и tj(S)2 на фиг. 5) с одинаковыми моментами стоянки. После разгона электродвигатели работают практически вхолостую, их рабочие
точки располагаются на начальных участках механических характеристик. Но мере выбирания слабины каната увеличивается натяжение в нем, а следовательно, и сигнал на выходе датчиков 26 и 27 натяжения, напряжение тиристорных преобразователей
и скорости вращения электродвигателей уменьщаются, рабочие точки перемещаются вниз. В установивщемся режиме скорости вращения электродвигателей равны нулю, электродвигатели находятся под током и
развивают одинаковые тяговые моменты, величина которых соответствует заданному натяжению. Рабочие точки электродвигателей находятся в точке А (фиг. 5). Напряжение тиристорных преобразователей равно падению напряжения в якорных цепях электродвигателей и составляет несколько процентов от номинального значения. Тиристорные преобразователи работают в качестве источников тока в выпрямительном режиме. Углы открывания тиристоров близки к
° Регулировочную характеристику на фиг. 4).
Для перемещения грузовой тележки 6, например, к принимающему судну подается сигнал задания перемещения Uj на вход
усилителя 25 перемещения (фиг. 2 с выхода которого снимаются два противоположных по знаку и одинаковых по величине сигнала и подаются на сумматоры 23 и 24 усилителей 21 и 22 натяжения. При этом увеличивается сигнал управления Uyi на
входе тиристорного преобразователя ТП1 и уменьщается сигнал управления U на входе тиристорного преобразователя ТП2. В соответствии с характеристикой (фиг. 3) уменьщается угол открывания тиристоров
силовой схемы 17 и увеличивается угол открывания тиристоров силовой схемы 18. Напряжение на зажимах электродвигателя 15 увеличивается, а напряжение на зажимах электродвигателя 16 уменьщается (см. регулировочную характеристику на фиг. 4).
Это приводит к увеличению момента стоянки электродвигателя 15 и к уменьщению момента стоянки электродвигателя 16. Натяжение в ветви каната, связанной с электродвигателем 15, увеличивается, а натяжение в ветви каната электродвигателя 16 уменьщается. Механическая характеристика электродвигателя 15 (пряма5Г i«/(S) 1 на фиг. 6) смещается вправо (прямая CJ(S), на фиг. 6), рабочая точка переходит в точку Б. Одновременно механическая характеристика электродвигателя 16 (прямая cJ(S)i на фиг. 6) смещается влево (прямая (S) на фиг. 6). Рабочая точка этого электродвигателя переходит Б точку В. Как только усилие в ветви каната электродвигателя 15 станет больше, чем усилие в другой ветви, и достаточно, чтобы прокрутить лебедку электродвигателя 16 в сторону «Травить, начнется перемещение тележки 6 в направлении принимающего судна. Электродвигатель 15 продолжает работать в двигательном режиме, его скорость будет увеличиваться в соответствии с характеристикой iiS(S) , а натяжение в ветви каната, связанной с ним, уменьшается. В то же время электродвигатель 16 начнет вращаться в обратную сторону и переходит в генераторный режим. Его скорость будет расти в соответствии с механической характеристикой, что приведет к росту его тока и к увеличению натяжения в ветви каната, связанной с ним. В устаноБивщемся режиме электродвигатели работают в точке Г при заданной скорости вращения и практически неизменном натяжении в канатах. В этом случае возможны два режима работы тиристорного преобразователя ТП2. При малых скоростях перемеш,ения грузовой тележки, когда сигнал управления остается больше, чем 0,5, а угол открывания тиристоров этого преобразователя меньше 90°, последний работает в выпрямительном режиме, его напряжение положительно и подпитывает якорную цепь электродвигателя 16,работаюшего генератором. Однако из-за действия обратной связи по натяжению ток этого электродвигателя не превышает значения, соответствующего разности сигналов задания по натяжению и задания по скорости перемещения. При средних и больших скоростях, когда сигнал управления становится меньше 0,5, а угол открывания больше 90°, тиристорный преобразователь ТП2 переводится в инверторный режим, его напряжение отрицательно, и, как только ЭДС электродвигателя 16 станет больше по асболютной величине напряжения тиристорного преобразователя ТП2, последний начнет отдавать в сеть энергию электродвигателя 16.
Для остановки грузовой тележки 6 сигнал задания по скорости уменьшается до нуля, и тележка останавливается в заданном положении. Система находится в исходном состоянии и поддерживает постоянство натяжения в канатах.
При реверсе, т. е. при возврате грузовой тележки на передаюшее судно, меняется полярность задающего сигнала по скорости перемещения, что приводит к увеличению сигнала управления на тиристорного преобразователя ТП2, и уменьшению сигнала управления на входе тиристорного преобразователя ТП1. В результате увеличивается натяжение в ветви каната, связанНОЙ с электродвигателем 16, и уменьшается натяжение в ветви каната, связанной с электродвигателем 15. Электродвигатель 16 работает в двигательном режиме, а электродвигатель 15 переходит работать в генераторный режим с отдачей электроэнергии в сеть, тележка перемещается в сторону передающего судна. При этом направление тока в главной цепи остается неизменным, что позволяет использовать нереверсивные тиQ ристорные преобразователи и уменьшает инерционность системы.
При качке или расхождении судов натяжение в канате будет изменяться. Автоматическое регулирование натяжения в канате происходит следующим образом. При движении к принимающему судну 2 (фиг. 2) в установившемся режиме механические характеристики электродвигателей будут располагаться так, как показано на фиг. 7 (прямые 05(5), tJ(S)2, рабочая точка А). Пусть судно 1 остается неподвижным, а ка0чается судно 2. Если судно 2 качнулось вправо, то натяжение в ветвях каната возрастет на величину ASi, и скорость электродвигателя 15 начнет уменьшаться, а скорость электродвигателя 16 увеличиваться.
5 Электродвигатель 15 переходит работать в точку А , а электродвигатель 16 -в точку А. Одновременно увеличиваются сигналы обратных связей на выходе датчиков 26 и 27 натяжения, что приводит к уменьшению сигналов управления на входах тиристор0 ных преобразователей ТП1 и ТП2. Вследствие этого увеличиваются углы открывания тиристоров силовых схем 17 и 18 (фиг. 3), и в соответствии с регулировочной характеристикой на фиг. 4 уменьшается напряже ние тиристорного преобразователя ТП1, работающего выпрямителем, и увеличивается напряжение тиристорного преобразователя ТП2, работаюшего инвертором. Ток электродвигателя 15, определяемый разностью между напряжением выпрямителя ТП1 и
0 ЭДС двигателя 15, уменьшается, ток электродвигателя 16, определяемый разностью между ЭДС двигателя 16 и напряжением инвертора ТП2, также уменьшается. Это приводит к смешению механических характеристик влево в точку А, (прямые cJ(S)i
5 и cJ (S)V на фиг. 7) и уменьшению натяжения в ветвях каната, создаваемого электродвигателями. В установившемся режиме натяжение в канате остается практически неизменным S , равным сумме натяжений Si, создаваемого электродвигателями, и ASi, создаваемого качкой. Электродвигатели работают с разными скоростями в точках Б и В на фиг. 7.
При уменьшении натяжения в канате (судно 2 качнулось влево) система отрабатывает этот сигнал таким образом, что механические характеристики электродвигателей смещаютя вправо в точку А (прямые CJ(S) , uJ(S) на фиг. 7), а натяжение в ветвях каната, создаваемое электродвигз телями, увеличивается до натяжения Sj. на фиг. 7. Суммарное натяжение в канате будет равно разности натяжений Sj, создаваемого электродвигателями, и натяжения /1S2, создаваемого . При совместной качке обоих судов в канатной дороге происходит алгебраическое суммирование натяжений, создаваемых качкой судна 1 и качкой судна 2. Поэтому система будет отрабатывать результирующее воздействие, равное алгебраической сумме натяжений, создаваемых судном 1 и судном 2. Аналогично поддерживается натяжение в канатах при расхождении или сближении судов. Подъем или опускание тележки 6 на палубу передающего или принимающего судна осуществляется путем изменения натяжения в канатной дороге. Осуществление рекуперации в электрическую сеть судна энергии приводных электродвигателей и энергии возмущающей силы приводит к снижению затрат электроэнергии и уменьщению динамических нагрузок. Применение тиристорного электропривода с нереверсивными преобразователями уменьшает стоимость и массо-габаритные показатели устройства, повышает надежность и быстродействие системы. Кроме того, отпадает необходимость применения быстро реверсируемых электродвигателей и элек трических дифференциалов. Наиболее важной составляющей технико-экономического эффекта от использования изобретения является экономия электроэнергии, получаемая при осуществлении рекуперации в электрическую сеть судна энергии приводных электродвигателей. Формула изобретения Устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки,связанные с электродвигателями постоянного тока, грузовую тележку, прикрепленную к одной из ветвей каната и кинематически связанную с другой ветвью каната, а также электронный узел управления режимом работы электродвигателей, отличающееся тем, что, с целью уменьшения затрат электроэнергии, электронный узел управления режимом работы электродвигателей содержит два датчика натяжения ветвей каната, входы которых связаны с тяговыми лебедками, два тиристорных преобразователя, выходы которых подключены к первому и второму электродвигателям соответственно, два усилителя натяжения в ветвях каната, выходы которых подключены ко входам первого и второго тиристорных преобразователей соответственно, два сумматора, выходы которых подключены ко входам первого и второго усилителей натяжения соответственно, усилитель сигналов перемещения грузовой тележки с двумя выходами, подключенными ко входам первого и второго сумматоров соответственно, а также задатчики сигналов натяжения в ветвях канатов и сигналов перемещения грузовой тележки, причем выходы датчиков натяжения и задатчик сигналов натяжения подключены ко входам первого и второго сумматоров соответственно, а задатчик сигналов перемещения грузовой тележки связан со входом усилителя сигналов перемещения грузовой тележки. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1245785, Кл. 65 а2 31, 1968 (прототип).
град
0,25 0.5 ОЛ5 1.0 fuiJ
W
с(гра
РигЛ
