Изобретение относится к области управления электроприводами и может быть использовано в системах векторного управления машинами переменного тока для получения сигналов пропорциональных модулю главного потоко- сцепления и направляющих косинусов системы координат с опорным вектором главного потокосцеппения.
Целью изобретения является повышение точности измерения.
На чертеже представлена схема устройства для измерения модуля и направляющих косинусов вектора глав- ного потокосцепления в машинах переменного тока.
Устройство содержит датчики Холла 1 и 2, вычислитель 3 модуля, 4 и второй 5 блоки умножения, регулятор 6, первый апериодический уси- литель 7, третий 8 и четвертый 9 блоки умножения, интегрируюшзие усилители 10 и 11,,пятый 12 и шестой 13 блоки умножения, вычислитель 14 квадра- та модуля, пропорционально-интегральный (гот) регулятор 15, вычислитель 16 абсолютного значения, седьмой блок 17 умножения, операционные усилители 18 и 19, первую 20, вторую 21 и третью 22 выходные шины, шину 23 регулирования частоты, шину 24 задания амплитуды, шину 25 смещающего напряжения, восьмой 26 и девятый 27 блоки умножений, ршну 28 задания час
тоты, первый 29 и второй 30 и третий 31 сумматоры.
Выходы датчиков Холла 1 и 2, соединены с входами первого 18 и второго 19 операционных усилителей, выходы которых соединены с входами вычислителя 3 модуля, выход последнего соединен с первой выходной шиной 20, а входы - с первыми входами первого 4 и второго 5 блоков умножения, выходы которых соединены с первыми и вторыми входами первого апериодического усилителя 7 и регулятора 6. Выход последнего соединен с .входом апериодического усилителя 7, выход которого подключен к вторым входам третьего 8 и четвертого 9 блоков умножения и к шине 23 регулирования частоты, выходы третьего 8 и четвертого 9 блоков умножения соединены с первыми входами соответственнЬ первого 29 и второго 30 сумматоров, выходы последних соединены с первыми входами соответственно первого 10
д
5
5 Q
0
5
0
5
0
5
и второго 11 интегрирующих усилителей, выходы которых подключены соответственно к второй 21 и третьей 22 выходньм шинам, соединены с пер- ,выми входами четвертого 9 и третьего 8 блоков умножения соответственно, с вторыми входами второго 5 и первого 4 блоков умножения, с первыми входами соответственно пятого l2 и шестого 13 блоков умножения и с входами вычислителя 14 квадрата модуля, выходом соединенного с первым входом ПИ регулятора 15.
Второй вход регулятора 15 соединен с шиной 24 задания,амплитуды, первый вход вычислителя 16 абсолютного значения подключен к вторым входам третьего 8 и четвертого 9 блоков умножения, второй вход соединен с пжной 25 смещающего напряжения, а выход соединен с первым входом седьмого блока 17 умножения, второй вход которого соединен с выходом пропорционально-интегрального регулятора 15, а выход подключен к вторым входам пятого 12 и шестого 13 блоков умножения, выходы которых соединены соответственно с вторыми . входами первого 29 и второго 30 сумматоров, выходы которых соединены с первыми входами соответственно восьмого 26 и девятого 27 блоков умножения , вторые входы которых соединены соответственно с третьей 22 и второй 21 выходными шинами, а выходы соединены с входами третьего сумматора 31, выход которого соединен с дополнительным входом регулятора 6, третий дополнительный вход первого апериодического усилителя 7 соединен с шиной 28 задания частоты.
Устройство работает следуюпщм образом.
Вращающееся поле электрической машины наводит в датчиках Холла 1 и 2 ЭДС, имеюшле основные (первые) гармоники 1д( н / ( 1/ь , сдвинутые на 1i l2 радиан, амплитуды которых пропорциональны величине магнитного потока машины. Эти сигналы, содержащие высшие гармоники, определяющиеся технической реализацией машины и источника напряжения переменной частоты (например, вентильного преобразователя частоты)5 поступают на входы блоков 4 и 5 умножения и вычислителя 3 модуля . Блоки 4 и 5 умножения перемножают входные значения sincff , cosy, с текущими значениями cos t, sin if, частоты и фазы сигналов на выходах интегрируюВщх усилителей 10 и 11. (В силу закона частотного регули- рован ия машины модуль главного пото- косиепления ( д I постоянен) . Разность сигналов.блоков перемножения:
sin (f,.cos ( cos i sin sin (( )
Г
(или COS if -sin if cos (fJ B зависимости от порядка чередования фаз) подается на вх.од регулятора 6, Так как на вькодах восьмого 26 и девятого 27 блоков умножения формируются сигналы, пропорциональные произведениям
cos i/
и со sin Cf, .-sin if ,
где cos tf cos ( J co(t)dt);
30
sinLp sin(| cxj(t)dt), TO на выходе тг етьего сумматора получается сигнал .. .
cd (cos cfl-cos q +sin if sincf )
f ( J )dt- Jw(t)dt) a .
e 0
Разностный сигнал oJ через регулятор 6 и первый апериодический усилитель 7 попадает на входы третье-, го 8 и четвертого 9 блоков умножения. 40 циональный заданной частоте шине 23
Сигнал, поступающий с апериодического усилителя 7 на шину 23 регу лирования частоты своей абсолютной величиной определяет коэффициент усиления в контуре, образованном блоком 8 умножения, интегрирующим усилителем 10, блоком 9 умножения и интегррфующим усилителем 11, и частоту генерируемых колебаний, а полярность сигнала на шине 23 регулирования частоты определяет последовательность чередования фаз двухфазной системы выходных сигналов. Сигналы с интегрирующих усилителей 10 и 11 поступают на входы вычислителя 14 квадрата модуля, а с его выхода на вход Ш1-регулятора 15, настроенного по требуемому качеству стабилизации уровня амплитуды колебаний, задаваемого сигналом, поступающим на второй вход ПИ-регулятора 15 с шины 24 задания амплитуды.
Сигнал ошибки по амплитуде с выхода пи-регулятора 15 поступает на 35 первый вход блока 17 умножения, коэф фициент передачи которого пропорционален сигналу с выхода вычислителя 16 абсолютного значения, на один вход которого подается сигнал, пропо
циональный заданной частоте шине 23
кого усилителя 7 фиксирует рабочую точку на статической характеристике регулирования частоты и, следоват ель- но, регулятор 6 работает в окрестности этой точки (что важно, так как sin Aif Cfc обшибкой до 0,5% при ,17 рад). (R результате этих мер, в том числе линеаризации, обеспечивается прецизионное отслеживание частоты).
Сигнал, поступающий с апериодического усилителя 7 на шину 23 регулирования частоты своей абсолютной величиной определяет коэффициент усиления в контуре, образованном блоком 8 умножения, интегрирующим усилителем 10, блоком 9 умножения и интегррфующим усилителем 11, и частоту генерируемых колебаний, а полярность сигнала на шине 23 регулирования частоты определяет последовательность чередования фаз двухфазной системы выходных сигналов. Сигналы с интегрирующих усилителей 10 и 11 поступают на входы вычислителя 14 квадрата модуля, а с его выхода на вход Ш1-регулятора 15, настроенного по требуемому качеству стабилизации уровня амплитуды колебаний, задаваемого сигналом, поступающим на второй вход ПИ-регулятора 15 с шины 24 задания амплитуды.
Сигнал ошибки по амплитуде с выхода пи-регулятора 15 поступает на первый вход блока 17 умножения, коэффициент передачи которого пропорционален сигналу с выхода вычислителя 16 абсолютного значения, на один вход которого подается сигнал, пропор-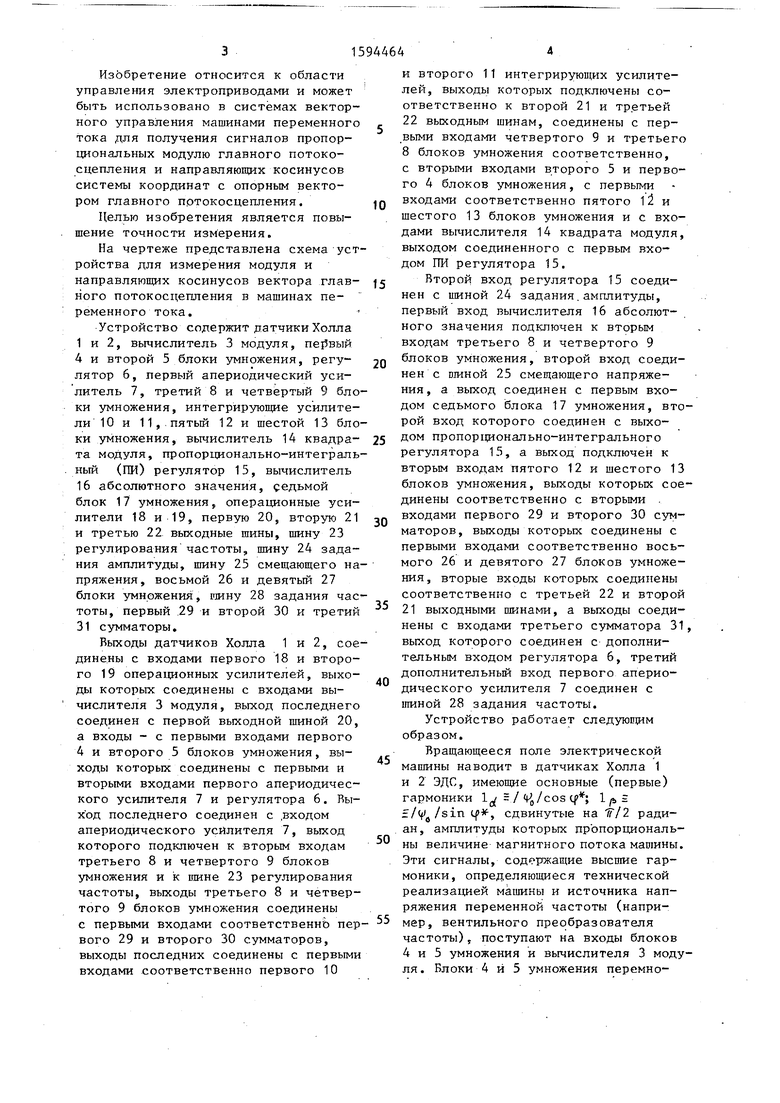
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1981 |
|
SU974310A1 |
| Управляемый генератор гармоноческих сигналов | 1980 |
|
SU858010A1 |
| Управляемый генератор гармонических сигналов | 1988 |
|
SU1624485A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Устройство для определения параметров главного потокосцепления машины переменного тока | 1985 |
|
SU1319219A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Управляемый генератор гармонических сигналов | 1976 |
|
SU642724A1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
Изобретение относится к управлению электроприводами и может быть использовано в системах векторного управления машинами переменного тока для получения сигналов, пропорциональных модулю главного потокосцепления и направляющих косинусов системы координат с опорным вектором главного потокосцепления. Целью изобретения является повышение точности измерения. Устройство содержит датчики Холла 1 и 2, вычислитель 3 модуля, блоки 4 и 5 умножения, регулятор 6, первый апериодический усилитель 7, третий и четвертый блоки 8 и 9 умножения, интегрирующие усилители 10 и 11, пятый и шестой блоки 12 и 13 умножения, вычислитель 14 квадрата модуля, регулятор 15, вычислитель 16 абсолютного значения, седьмой блок 17 умножения, операционные усилители 19 и 19, выходные шины 20-22, шину 23 регулирования частоты, шину 24 задания амплитуды, шину 25 смещающего напряжения, восьмой и девятый блоки 27 и 28 умножения, шину 28 задания частоты, сумматоры 29-31. 1 ил.
При этом регулятор 6 обеспечивает требуемое качество фазирования, а первый апериодический усилитель 7 участвует в фильтрации высших гармоник и формирования динамики. Кроме того, с помощью первого, второго и третьего дополнительных входов на первый апериодический усилитель 7 поступает сигнал регулирования частоты сигнал задания частоты задания частоты.
За счет поступления на вход первого апериодического усилителя 7 сигнала задания ct) создается опережение при фазировании. Опережающая обратная связь с выходов первого 4 и второго 5 блоков умножения на первый и второй дополнительные входы первого апериодичесWiC шины 28
регулирования частоты, а на другой вход подается напряжение с шины смещающего напряжения. Напряжение с выхода блока 17 умножения поступает 5 на вторые входы блоков 12 и 13 умножения, которые реализуют при подаче на их первые входы напряжений с выходов интегрирующих усилителей 10 и 11 коэффициенты обратных связей. При этом знак обратных связей, независимо от полярности сигнала на пине регулирования частоты, определяется по.знаку ошибки амплитуды: если заданная амплитуда больше действительной - обратные связи положительны, в противном случае - отрицательны, а при их равенстве коэффициенты об- ратньгх связей равны нулю Коэффициент обратных связей определяется
0
5
7
не только ошибкой по амплитуде, но и абсолютной величиной заданной чатоты, в результате чего качество переходных процессов стабилизации не зависит от частоты колебаний и порядка чередования фаз (полярност сигнала на шине регулирования частоты) ,
Сигнал смещения на шине смещающ напряжения обеспе швает необходим1) коэффициент стабилизирующих обратных связей при частотах,.близких к нулю. В результате на выходах интерирующих усилителей 10 и 11 получаюся сигналы стабильной амплитуды, си фазные первым гармоникам входной системы сигналов (с сильно подавленными высшими гармониками).
Дпя обеспечения унификации блоков умножения по коэффигщенту пере- и 6ЦХ
дачи (,1
) и полного использования их динамического диапазона, сигналы с выходов датчиков Холла 1 и 2 поступают на операционных усилителей 18 и 19 .(коэффициент их усиления зависит от типа датчиков), а с их выходов - на в-ход вычислителя 3 модуля и блоков 4 и 5 умножения.
Кроме того, для обеспечения оптимальных режимов работы блоков 4 и 5 умножения и регулятора 6 в системах с широким диапазоном изменения амплитуды потока возможно п:ри менение блоков деления, при этом синалы с выходов усилителей 18 и 19 поступают на входы блоков деления, на другие входы которых поступает сигнал с выхода вычислителя 3 модул в результате чего выходные сигналы датчиков Холла нормируются и на входы блоков 4 и 5 умножения с выходов блоков деления поступают сигналы постоянной амплитуды. Формула изобретени
I
Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока, содержащее два датчика Холла, выходами соединенные с входами соответственно первого и второго операционных усилителей, выходы которых соединены с входами вычислителя модуля, выход которого соединен с первой выходной шиной, а входы с первыми входами первого и
8
10
20
25
30
35
40
45
50
55
второго блоков умножения, выходы которых соединены с первым и вторым входами регулятора, выходом подключенного через первый апериодический усилитель к вторым входам третьего и четвертого блоков умножения, пер- .-:вые .входы четвертого и третьего блоков умножения соединены соответственно с второй и третьей выходными шинами, с вторыми входами соответственно второго и первого блоков умножения, с первыми входами соот- ветственно пятого и шестого блоков умножения и с входами вьтислителя квадрата модуля, выходом соединенного с первым входом пропорционально- интегрального регулятора, второй вход которого соединен с шиной задания амплитуды, вычислитель абсолютного значения, первый вход к.оторого подключен к вторым входам третьего и четвертого блоков умножения, вто- . рой вход - к шине смещающего напря-. жения, а выход к первому входу седьмого блока умножения, второй ёх бй которо-го соединен с выходом пропорционально-интегрального регулятора, а выход подк.лючен к вторым входам пятого и шестого блоков умножения, отличающееся тем, что, с целью повышения точности измерения - за счет уменьшения ошибки по фазе, в него дополнительно введен первый, второй и третий сумматоры, восьмой и девятый блоки умножения, два интегрирующих усилителя и шина задания частоты, при этом первые входы первого и второго сумматоров соединены с выходами соответственно третьего и четвертого блоков умножения, их вторые входы соединены с выходами соответственно пятого и шестого блоков умножения, а их выходы с входами соответственно первого и второго интегрирующих усилителей и с первыми входами восьмого и девятого блоков умножения, вторые входы которых соединены соответственно с третьей и второй выходными шинами, а выходы соединены с входами третьего сумматора, выход которого соединен с третьим входом регулятора, а первый и второй входы последнего подключены соответственно к второму и третьему входам первого апериодического усилителя, к четвертому входу которого подключена шина задания частоты.
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1981 |
|
SU974310A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
