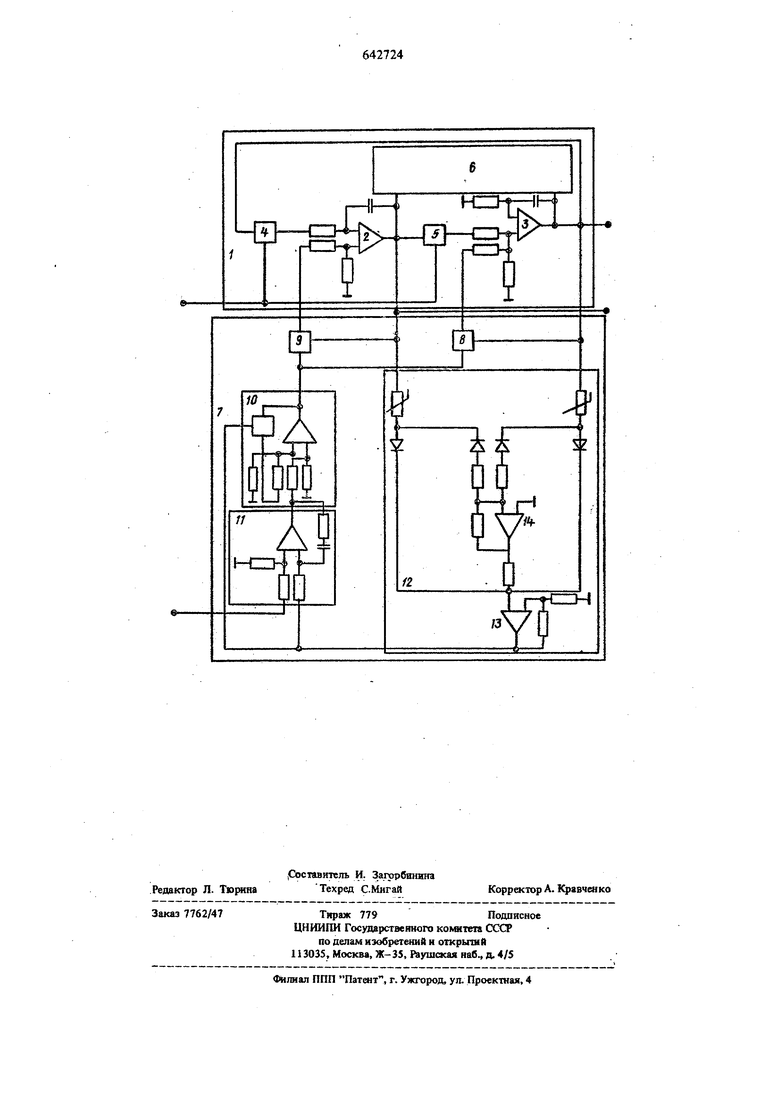
Изобретение относится к системам управления автоматизированными электропргшодами и может быть кспользоваио в системах векторного управления в качестве датчика сигналов иаправляющих косинусов вращающейся системы координат в схеме вычислителя модуля опорного вектора и его направляющих косинусов. Известны генераторы nepeMetmoro тока, основанные на преобразовании перемещений пропорциональных cos (f, sin электрические сигналы 1. Однако они ие обеспечивают требуемой надежности и имеют сравнителыю узкий частотный диапазон работы. Наиболее близким к изо бретению по тех1шческой суищости является генератор, содержащий блоки умножения и блок задания начальных условий {21. Ои характеризуется также узким частотным диапазоном работы. Целью изобрететш является расширение частотного диапазона. В описываемом генераторе это достигается тем, что в иего введены интеграторы, блок вычисления модуля, блок деления и Пи-регулятор, вход которого подключен к вы(ходу блока вычисле1шя модуля, соед1шенного с первым входом блока деления, второй вход которого подключен к выходу Пи-регулятора, а выход блока деле1шя соединен с первыми входал-ш первого и второго блоков умножения, второй вход первого блока умножения объединен с первым входом блока вычисления модуля и подключен к выходу первого интегратора, входы которого соединены с выходами первого и третьего блоков умножения и первым выходом блока зада1шя начальных условий, второй выход которого подключен к одному из входов второго интегратора, другие входы которого соединены с выходами второго и четвертого блоков умножения, вььход второго гааегратора подключен ко входу третьего блока умноже1шя и ко вторым входам второго блока умножения и блока вышсления модуля. На чертеже показана cxeNta описываемого генератора. Он состоит из нестабилизировшиюго генератора 1, собра1шогр по схеме консервативного звена и включающего два последовательно соединенных 1штегратора 2 и 3, первые входы которых соединены с блоками 4 и 5 умножеюш, блок 6 задшшя 1ичальных условий, и стабилизатора 7, содержащего блоки 8 и 9 умножения, выходы которьгх соединены со вторыми входами tmreграторов 2 и 3 и реализуют перемешше коэффициенты обратаых связей интеграторов, а первые входы подключены к выходу блока 10 деления, первый вход которого через Пи-регулятор 11, а второй - непосредственно соедюгены с выходом блока 12 вычисления модуля, входы которого, а также выходы блоков 8 и 9 подсоединены к выходам интеграторов 2 и 3. Блок 12 составлен из двух носледователыю соединенных уси;п1телей 13 и 14, на входах каждого из которых ы лючены цепочки из последовательно .соединенных диода и нелинейного сопротивления. Входной сигнал со подается на блоки 4 и 5, которые определяют коэффициенты усилен1Ея интеграторов 2 и 3 по первым входам, на которые подается сигнал с блока 6, определяющего амплитуду сигналов р и фазу на выходе интеграторов 2 и 3. В результате на выходе 1штеграторов получаем мгнове1шые эначеШш выходных сигшлов, выраженные зависимостью /t А рсоа ) J()drt% Эти сигналы подаются на блок 12, реализующий зависимость p(,,) Т.е. вы деляющий текущее значение алшлитудыр, поступающей на первый вход Пи-регулятора И, на второй вход которого подается уставка р . Если амплитуда р, вследствие неточности уставки начальных условий или возбуждения схемы, ста;новится отличной от значения уставки/, то на Ш1-регулятора 11 возникает сигнал, проIпорциональный ощибке по амплитуде, который поступает 1и первый вход блока 10 и нормиру;ется амгьтитудой р, поступающей на второй вход блока 10, на выходе которого получается сигнал, выраженный зависимостью (р - р)/р. Этот сигнал :пос1упает на вторые входы блоков 8 и 9, которые реализуют коэффициенты обратных связей, подаваемых на вторые входы шпеграторов 2 к 3. Знак обратной связи определяется по знаку опшбки амплитуда : в случае - обратные связи-положптельные, если р р - обратные связи-отр1щательные, если р р-коэффициенты обратных связей нулю. Коэффициент обратной связи определяется отаосительной ошибкой по амгшитуде и, еледовательно. кацпг.твп nf npvnntn,iv т, довательно, качество переходных процессов 64 4 табилизации становится не зависимым от устаовочного значения модуля. Наличие двух стаияизлрующнх обратных связей, реализующихся вумя блоками 8 и 9 умножения, позволяет более точно поддерживать динамические характеристики интеграто ров 2 и 3 независимо друг от руга. Описьшаемый генератор позволяет повысить точносп. гамерения мгновенного пространственного положения обобщенных векторов электромагнитньк величин и обеспечивает расширение частотного диапазона работы. Формула изобретения Управляемый генератор гармонических сигналов, содержащий бло1си умножения и блок задания начальных условий, отличающийся тем, что, с целью расширения частотного диапазона работы генератора, в него введеш 1 интеграторы, блок вычисления модуля, блок деления и Пи-регулятор, вход которого подкшочен к выходу блока вычисления модуля, соединенного с первым входом блока деления, второй вход которого подключен к выходу Пи-регулятора, а выход блокп деления соещшсн с первыми входами первого и второго- блоков умножения, второй вход первого блока умножения объещшен с первым входом блока вычнсле1Шя модуля и подключен к первого интегратора, входы которого соединены с выходами первого и третьего блоков умножения и первым выходом блока задания начальных условий, второй вьрсод которого подключен к одному из входов второго интегратора, другие входы которого соеди 1ены с выходами второго и четвертого блоков умножения, выход второго интегратора подключен ко входу третьего блока умножения и ко вторым входам Второго блока умножения и блока .вы. числения модуля. Источники информации, пршитые во внима-г пне при экспертизе 1.Патент США №3849720, кл. 322/96, 1974. 2. Проектирование и примене ше операционных усилителей Под ред. Дж. Грэма. М., Мир, «тл - . 1974, с. 433,
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый генератор гармонических сигналов | 1978 |
|
SU769563A1 |
| Управляемый генератор гармонических сигналов | 1988 |
|
SU1624485A1 |
| Управляемый генератор гармоноческих сигналов | 1980 |
|
SU858010A1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1981 |
|
SU974310A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ С БЛОКОМ ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2000 |
|
RU2200871C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА | 2003 |
|
RU2268392C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1987 |
|
SU1594464A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |