фиг.1
11
Изобретение относится к электротехнике, а именно к элементам систем управления электроприводами, и может .быть использовано в системах вектор- .ного управления машинами переменного тока для получения сигналов, пропорциональных модулю главного потоко- сцепления и направляющих косинусов системы координат с опорным вектором главного потокосцепления„
Цель изобретения - повьшюние точности за ёчет непрерывной коррекции по основной гармонике входной систем сигналов.
На фиг. 1 представлена функциональная схема устройства для определения параметров главного потокосцеп ления машины переменного тока; на фиг, 2 - схема регулятора частоты; на фиг. 3 - схема управляемого гене- ,paTopaj на фиг. 4 - схема вычислителя векторной производной выходной системы двухфазных напряжений.
Устройство для определения параметров главного потокосцепления машины переменного тока содержит две измерительные обмотки 1 и 2 (фиг.. 1), уложенные в расточку статора машины переменного тока, управляемый генератор 3 с двумя вспомогательными и двумя основными выходами, образующими первые два выхода устройства для определения параметров главного потоко сцепления машшгы переменного тока, и интегратор 4. В устройство для определения параметров главного по токосцепления машины переменного тока введены преобразователь 5 координат с двумя управляющими и двумя опорными входами, регз лятор 6 частоты с корректирующим входом, два фильтра 7 и 8 четыре сумматора 9-12 и вычислитель 13 векторной производной, выполненньй с шестью входами 14-19.
Выход первой измерительной обмот. - ки 1 подключен к первым входам пер вого и второго сумматоров 9 и 10, выход второй измерительной обмотки 2 подключен к первым входам третьего и четвертого сумматоров 11 и 1-2. ВЫХОДЫ первого и третьего -сумматоров 9 и 11 соединены с соответствующими управляющими входами преобразователя 5 координат, опорные входы которого объединены соответственно с первым и вторым входами 14 и 15 вычислителя векторной производной 13 и подключены к основным выходам управ92192
ляемого генератора 3, вспомогательные выходы которого соединены.соответственно с третьим и четвертым входами 16 и 17 вычислителя 13 век5 торной производной.
Первый выход преобразователя 5 координат соединен с входом регулятора 6 частоты, корректирующий вход которого объединен с пятым входом 18
О вычислителя 13 векторной производной,, подключен к выходу интегратора 4 и образует третий выход устройства для определения параметров главного пото- косцепления машины переменного тока,
5 второй выход преобразов ателя 5 координат подключен к шестому входу 19 вычислителя 13 векторной производной и к входу интегратора 4. Выходы вычислителя 13 векторной производной
0 подключены к вторым входам второго и четвертого сумматоров 10 и 12, соединенных выходами через соответствующие фильтры 7 и В с вторыми входами первого и третьего сумматоров 9 и 11.
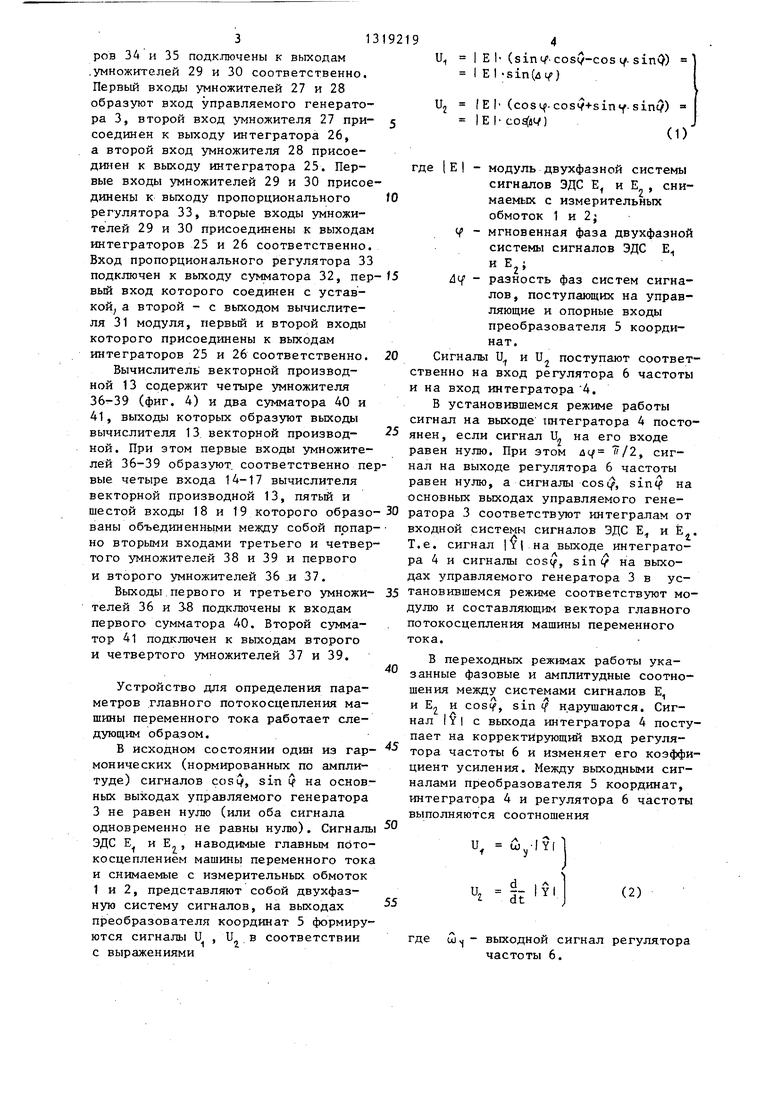
5 Регулятор 6 частоты содержит интегратор 20 (фиг. 2), апериодический фильтр 21, первый суммирующий усили- тель 22, умножитель 23, второй суммирующий усилитель 24. Выход суммирую0 щего усилителя 24 присоединен к вхо-, дам интегратора 20 и апериодического фильтра 21, выходы которых присоединены к первому и второму входам суммирующего усилителя 22 соответствен35 но, выход которого является выходом регулятора б частоты, присоединенный к первому входу умножителя 23, второй вход которого является корректирующим входом регулятора 6 частоты.
0 Выход умножителя 23 присоединен к втором входу суммирующего усилителя 24, первый вход которого является входом регулятора 6 частоты.
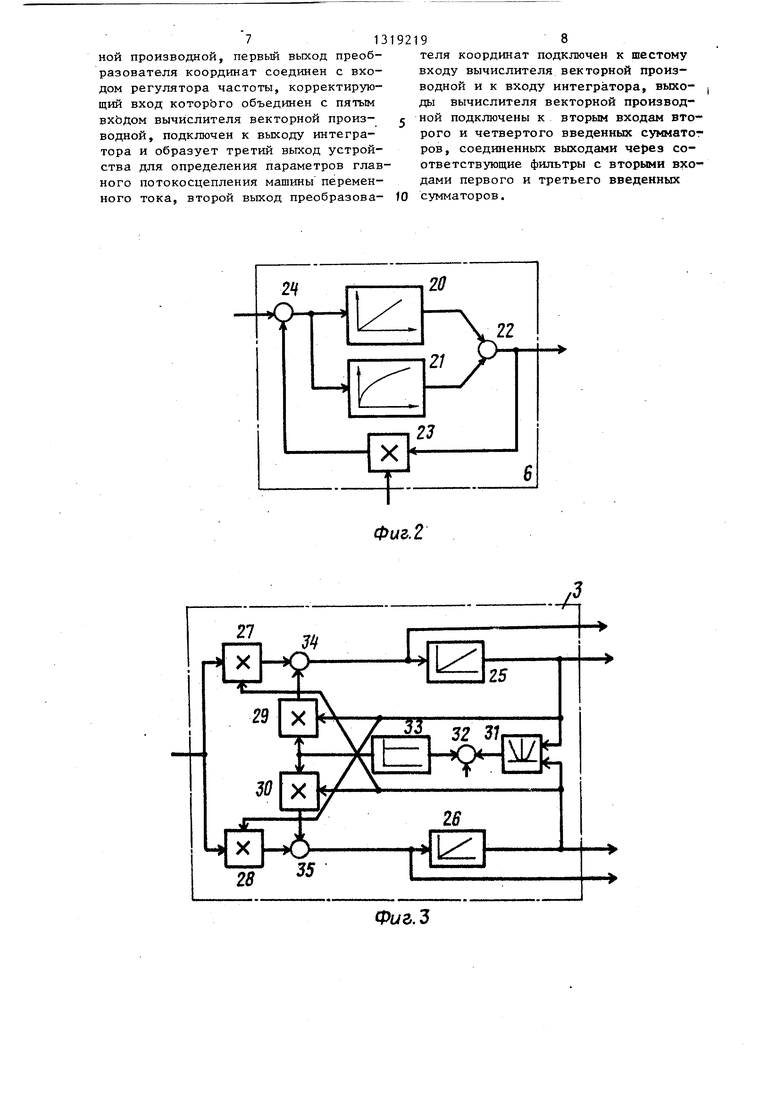
Управляемый генератор 3 содержит
4S интеграторы 25 и 26 (фиг, 3), умножители 27-30, вычислитель 31 модуля, cyMiviaTop 32, пропорциональный регулятор 33. Выходы интеграторов 25 и 26 являются основньми выходами управляе0 мого генератора 3 двухфазной системы напряжений соответственно. Входы интеграторов 25 и 26 присоединены к выходам сумматоров 34 и 35 соответственно, выходы сумматоров 34 и 35
5 являются вспомогательными выходами управляемого генератора 3, Первые входы сумматоров 34 и 35 присоединены к выходам умножителей 27 и 28 со-1 ответственно. Вторые входы суммато-
313
ров 34 и 35 подк.пючены к выходам .умножителей 29 и 30 соответственно. Первый входы умножителей 27 и 28 образуют вход управляемого генератора 3, второй вход умножителя 27 при- соединен к выходу интегратора 26, а второй вход умножителя 28 присоединен к выходу интегратора 25. Первые входы умножителей 29 и 30 присоединены к выходу пропорционального регулятора 33, в.торые входы умножителей 29 и 30 присоединены к выходам интеграторов 25 и 26 соответственно. Вход пропорционального регулятора 33 подключен к выходу сумматора 32, первый вход которого соединен с уставкой, а второй - с выходом вычислите 1ля 31 модуля, первый и второй входы
которого присоединены к выходам интеграторов 25 и 26 соответственно.
Вычислитель векторной производной 13 содержит четыре умножителя 36-39 (фиг. 4) и два сумматора 40 и 41, выходы которых образуют выходы вычислителя 13 векторной производ- ной. При этом первые входы умножителей 36-39 образуют, соответственно первые четыре входа 14-17 вычислителя векторной производной 13, пятый и шестой входы 18 и 19 которого образо- ваны объединенными между собой прпарно вторыми входами третьего и четвертого умножителей 38 и 39 и первого
и второго умножителей 36 .и 37.
Выходы первого и третьего умножи- телей 36 и S8 подключены к входам первого сумматора 40. Второй сумматор 41 подключен к выходам второго
и четвертого умножителей 37 и 39.
Устройство для определения параметров главного потокосцепления машины переменного тока работает следующим образом.
В исходном состоянии один из гар- монических (нормированных по амплитуде) сигналов со si), sin О на основных выходах управляемого генератора 3 не равен нулю (или оба сигнала одновременно не равны нулю). Сигналы ЭДС Е и Е, наводимые главным пото- косцеплением машины переменного тока и снимаемые с измерительных обмоток 1 и 2, представляют собой двухфазную систему сигналов, на выходах преобразователя координат 5 формиру
ются сигналы U с выражениями
и в соответствии
и., I Е 1- (sini/ cosO-cos I/. sinQ) I Е I s in (и )
(Eh (со8ц. cosy+siny-sint/)
lEI C0 4t/)
(1)
где 1E I - модуль двухфазной системы сигналов ЭДС Е и Е , снимаемых с измерительных обмоток 1 и 2;
V мгновенная фаза двухфазной системы сигналов ЭДС Е., и
Л разность фаз систем сигналов , поступающих на управляющие и опорные входы преобразователя 5 координат.
Сигналы и и и, поступают соответственно на вход регулятора 6 частоты и на вход интегратора 4.
В установившемся режиме работы сигнал на выходе тштегратора 4 постоянен , если сигнал U, на его входе равен нулю. При этом й /2, сигнал на выходе регулятора 6 частоты равен нулю, а сигналы со si/, на основных выходах управляемого генератора 3 соответствуют интегра.пам от входной системы сигналов ЭДС Е и Ё
сигнал
на выходе интеграто- 4 и сигналы cos(, sin if на выхоТ.е.
Р
дах управляемого генератора 3 в установившемся режиме соответствуют модулю и составляющим вектора главного потокосцепления машины переменного тока.
В переходных режимах работы указанные фазовые и амплитудные соотношения между системами сигналов Е., и Е2 и costf, sin If нарушаются. Сигнал IYI с выхода интегратора 4 поступает на корректирующий вход регулятора частоты 6 и изменяет его коэффициент усиления. Между выходньми сигналами преобразователя 5 координат, интегратора 4 и регулятора 6 частоты выполняются соотношения
и,
. I-.
YI
(2)
где UJ.( - выходной сигнал регулятора частоты 6.
513
Указанный сигнал la является управляющим для генератора 3, который корректирует фазу выходной системы сигналов cos ( , sin t/ устройства. При этом сигнал U- на входе интегратора 4 .сводился к нулю, а выходная система сигналов cost/, sin i/ соответствует интегралам от входной системы сигналов Е и Е .
Интегратор 20 и апериодический фильтр 21 в регуляторе 6 частоты обеспечивают переходный процесс установления фазы выходной системы сигналов, близкий к оптимальному.
В устройстве осуществляется непрерывная коррекция по основной гармонике входной системь сигналов благодаря введенному вычислителю 13 векторной производной. На его выходах формируются сигналы
, costf -lYr - Wy lYlsinQ
EJ sinM- -lYl +w,,|YlcosQ
,(3)
где (-tu,,sinQ), (cOyCosi/) - сигналы на входах 16 и 17 соответственно вычислителя 13 векторной производной., поступающие с вспомогательных выходов генератора 3.
Сигналы cos i , sin Ч поступают на входы 14 и 15, а сигналы |Y|,
т- |Y( - на входы 18 и 19 вычислителя 13 векторной производной. Полученная система сигналов Е , 2 сравнивается на входах сумматоров 10 и 12 с входной системой сигналов Е , Е,. Результаты сравнения через фильтры 7 и 8 поступают на входы сумматоров 9 и 11, благодаря чему осуществляется обратная связь по сигналам входной двухфазной системы и корректируются выходные сигналы устройства.
Таким образом, введение преобразователя координат, регулятора частоты, фильтров, сумматоро вычислителя векторной производной обеспечивает заданный характер переходных процессов при изменениях амплитуды и частоты входной двухфазной системы сигналовj обеспечивает подавление дрейфа интегратора и определяет возможность непрерывной коррекции по основной гармонике входной системы сигналов, благодаря чему в сравнении
92196
с известным устройством повышается точность определения модуля и составляющих вектора главного потокосцеп- ления машины переменного тока.
Формула изобретения
10
5
0
5
0
35
40
45
50
55
Устройство для определения параметров главного потокосцепления машины переменного тока, содержащее две измерительные обмотки, предназначенные для укладки в расточке статора машины переменного тока, управляемый генератор с двумя вспомогательными и двумя основными выходами, образующими первые два выхода устройства для определения параметров главного потокосцепления машины переменного тока, и интегратор, отличающееся тем , ЧТО, с целью повьш1ения точности за счет непрерывной коррекции по основной гармонике входной системы сигналов, введены преобразователь координат с двумя управляющими и двумя опорными входами, регулятор частоты с корректирующим входом, два фильтра, четыре сумматора и вычислитель векторной производной, выполненный с четырьмя ум- ножителями и двумя сумматорами, выходы которых образуют выходы вычислителя векторной производной, пятый и шестой входы которого образованы объединенными меящу собой попарно вторыми входами третьего и четвертого умножителей, первого и второго умножителей, выходы первого и третьего умножителей подключены к входам . первого сумматора вычислителя векторной производной, второй сумматор которого подключен к выходам второго и четвертого умножителей, вьпсод первой измерительной обмотки подключен к первым входам первого и второго введенных сумматоров, выход второй измерительной обмотки подключен к первым входам третьего и четвертого введенных сумматоров, выходы первого и третьего введенных сумматоров соединены с соответствующими управляющими входами преобразователя координат, опорные входы которого объединены соответственно с первым и вторым входами вычислителя векторной производной и подключены к основным выходам управляемого генератора, вспомогательные выходы которого соединены соответственно с третьим и четвертым входами вычислителя вектор713
ной производной, первый выход преобразователя координат соединен с входом регулятора частоты, корректирующий вход которЬго объединен с пятым входом вычислителя векторной производной, подключен к выходу интегратора и образует третий выход устройства для определения параметров главного потокосцепления машины переменного тока, второй выход преобразова192198
теля координат подключен к шестому входу вычислителя векторной производной и к входу интегратора, выходы вычислителя векторной производ- с ной подключены к вторым входам второго и четвертого введенных сумматог ров, соединенных выходами через соответствующие фильтры с вторыми входами первого и третьего введенных 10 сумматоров.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1138916A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1987 |
|
SU1594464A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |

Изобретение относится к электротехнике. Целью изобретения является повышение точности. Указанная цель достигается введением в устройство для определения параметров главного потокосцепления машины переменного тока преобразователя 5 координат, регулятора 6 частоты, фильтров 7 и 8, сумматоров 9-12 и вычислителя 13 векторной производной. В результате обеспечивается заданный характер переходных процессов при изменениях амплитуды и частоты входной двухфазной системы сигналов, подавление дрейфа интегратора 4, включенного , на входы 18 и 19 вычислителя 13, и непрерьшная коррекция по основной гармонике входной двухфазной системы сигналов. 4 ил. (Л V 00 СО ю со
--О
Фиг. 2
Фб/а.З
Редактор А.Сабо
Составитель А.Жилин Техред Б.Кадар
Заказ 2526/53Тираж 660Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигЛ
Корректор Т.Колб
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1976 |
|
SU767034A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
