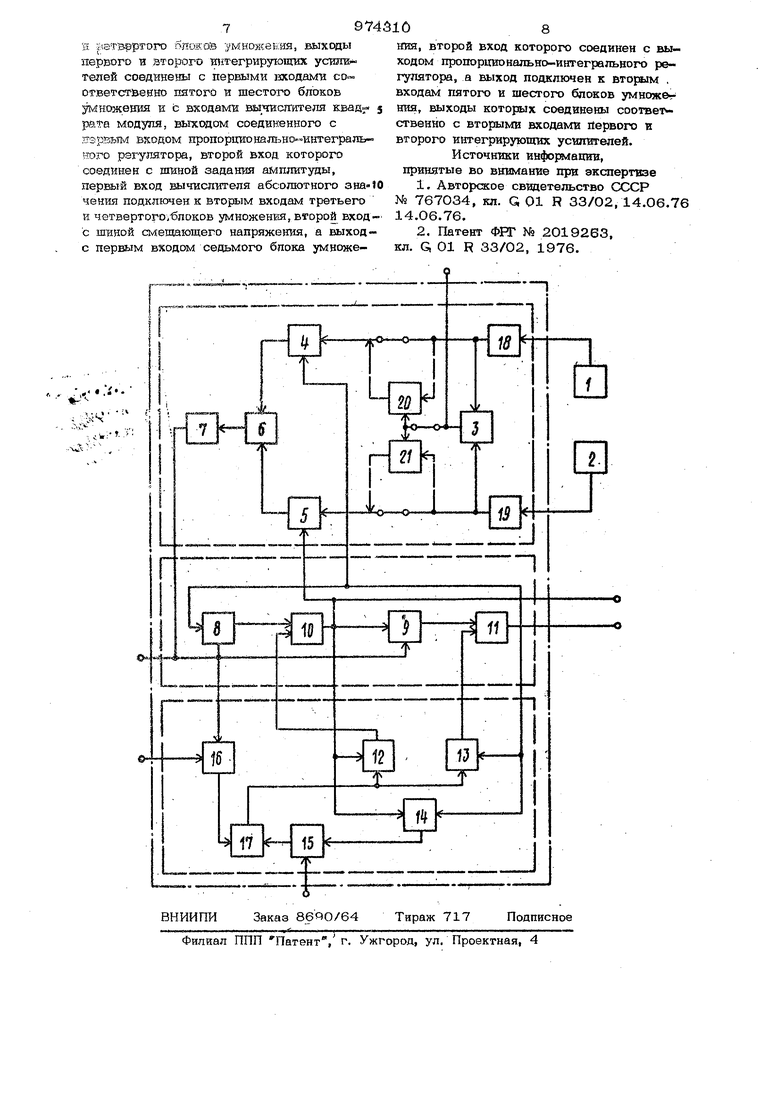
, второй блоки умн15жения, регулятор, греши к четвертый блоки умножения, №1ходы которых соединены с первыми входами соответственно первого и второго интегрирующих усилителей, выходы которых подключе яы к второй и третьей 1зьгход(Еым шинам и соединены с первыми зходами четвертого и третьего блоков умножения соответственно и с первыми входами первого и второго блоков умножения, введены первый и второй операционные усилители, апериодический усил тель, вычислитель квадрата модуля, проаорпионально-интегральный регулятор, , пятый, шестой и седьмой блоки умножеВИЯ и вычислитель абсолютного значения, причем выходы датчиков соедине-; с входами первого и второго операгщонных усилителей, выходы которых сое- дииены с -входами вычислителя модуля и с вторыми входами первого и второго бл ков умножения, выходы которых соединены с входами регулятора, выходом подключенного через апериодический усилитель к. вторым входам третьего и четверо того блоков умножения, выходы первого и второго интегрирующих усилителей соединены с первыми входами соответственно пятого и шестого блоков умшэжения и с входами вычислителя квадрата модуля, выходом соединенного с первым входом пропорционально интегрально)го регулятора, второй вход которого соединен с шиной задатш амплитуды, первый вход вычислителя абсолютного значешга подключен к вторым входам третьего и четвертого блоков умножения, второй вход - с шиной смещающего напряжения, а выход с первым входом седьмого блока умножетш, второй вход которого соединен с вы ходом пропорционально интегрального регулятора, а выход подключен к вторым входам пятого и шестого блоков умножеШ1Я, выходы которых соединены соответственно с вторыми входами первого и второго интегрирующих усилителей.. На чертеже представлена уст ройства для измерения модуля и напра&гшющих косинусов вектора главного потокосцепления в машгинах переменногю тока. Устройство содержит датчшси Холла 1 и 2, вычислитель 3 модуля, первый и второй блоки 4 и 5; умножения, регулятор 6, апериодическ-ий усилитель 7, тр&Titir, и четвертый блоки 8 и 9, умножешга интегрирующие усилители 10 и 11, пяты и шестой блоки 12 и 13 умножения, вычислтнтель 14 квадрата модуття, пропорционально-интегральный (ПИ) регулятор 15, вычислитель 16 абсолютного значения седьмой блок 17 умножения, операционные усилителя 18 и 19, блоки 20 и 21 деления. Устройство работает следующим образом. Вращающееся поле электрической машины наводит в датчиках Холла 1 и 2 ЭДС, имеющие первые гармоники е |Чо|со5Ч 6(5 |4p)sin Ч , сдвинутые на J7/2 рад, амплитуды которых пропорциональны величине магнитного потока машины. Эти сигналы, содержащие высшие гармоники,определяющиеся технической реализацией машины и источника напряжения переменной частоты (например, ветильного преобразователя частоты), поступают на входы блоков умножения 4 и 5 и вычислителя 3 модуля. Блоки умножения 4 и 5 перемножают входные значения si , созЧ с текущими значениями cos i бпЧ частоты и фазы сигналов на выходах интегрирующих усилтггелей 10 и 11. (В силу закона частотного регулирования машины, модуль главного потокосиепления постоянен). Разность сигналов блоков перемножения S-in4 -cos4 - s , или cosV -зшЧ -sintf -cosW в зависимости от порядка чередования фаз) через регулятор 6 и апериодический усилитель 7 попадает на входы третьего и четвертого блоков 8 и 9 умножения. При этом регулятор 6 обеспечивает оптимальное качество фазирования, а апериодический усилитель 7 участвует в фильтрации высших гармоник и формировании динам ики. Сигнал, поступающий с апериодического усилителя 7 на шину регулирования частоты своей абсолютной величиной определяет коэффициент усиления в контуре, образованном блоком 8 умножения, интегрирующим усилителем 10, блоком 9 умножения и интегрирующим усилителем 11, и частоту генерируемых колебаний, а поляр.ность сигнала на шине регулирования частоты определяет последовательность чередования фаз двухфазной системы выходных сигналов. Сигналы с интегрирующих усилителей 10 и 11 поступают на входы вычислителя 14 квадрата модуля, а с его выхода на вход ПИ регулятора 15, .настроенного по оптимальному качеству стабилизации для данного уровня амплитуды 5Э колебаний, задаваемого сигналом, поступающим на второй вход Г1И регулятора 15 с шины задания амплитудьк Сигнал ошибки по амплитуде с выхода ПИ регулятора 15 поступает на первый вход бло ка умножения 17, коэффициент передачи которого пропорционален сигналу с выхода вычислителя абсолютного значения. 16, на один вход которого подается сир нал, пропорциональный заданной частоте шины регулирования частоты, а на другой вход - напряжение с шины смешвющего напряжения. Напряжение с выхода блока 17 умножения поступает на вторы входы блоков 12 и 13 умножения, которые реализуют при подаче на их первые входы напряжений с выходов интегрирующих усилителей 1О и 11 коэффициенты обратных связей. При этом знак обратных связей, независимо от полярности сигнала на шине регулирования частоты, определяется по знаку ошибки амплитуды если заданная амплитуда больше действительной, обратные связи положительны, в противном случае - отрицательны, а при их равенстве коэффициенты обратных связей равны нуло. Коэффициент обратных связей определяется не только ошиб кой по амплитуде, но и абсолютной величиной заданной частоты, в результате чего качество переходных процессов стабилизации не зависит от частоты колебаний и порядка чередования фаз (полярности сигнала на шине регулирования частоты. Сигнал смещения на шине смешающег напряжения обеспечивает необходимый ко эффициент стабилизирующих обратных свя зей при частотах близких к нулю. В результате на выходах интегрирующих усилителей 10 и 11 получаются сигналы стабильной амплитуды, синфазные первым гармоникам входной системы сигналов (с сильно подавленными высшими гармониками) . Для обеспечения унификации блоков умножения по коэффициенту передачи (К 0,1 -) и полного использования их динамического диапазона сигналы с выходов датчиков Холла 1 и 2, п ступают на входы операционных усилителей 18 и 19 (коэффициент их усиления зависит от типа датчиков), а с их выходов - на входы вычислителя О модуля и блоков умножения 4 и 5. Кроме того, для обеспечетм оптитлальных режимов ра боты блоков умножения 4 и 5 и ПИ регулятора 6 в системах с широким диа- 10 пазоном изменения амплитуды потока возможно применение .блоков деления 2О и 21, при этом сигналы с выходов yciniivтелей 18 и 19 поступают на входы блоков деления 2О и 21, на другие входы которых поступает сигнал с выхода вычислителя 3 модуля, в результате чего выходные сигналы датчиков Холла нормируются и на входы блоков 4 и 5 умножения с выходов блоков 20,21 деления поступают суггналы постоянной амшппуды. Предложенное устройство для измерения модуля и направляющих конусов вектора главного потокосцеш1е гия в машинах переменного тока характеризуется широким динамическим диапазоном и высокой точностью за счет введения опера- .ционных усилителей, апериодического усилителя, вычислителя квадрата модуля, ПИ регулятора, трех блоков умножения и вычислителя абсолютного значения. Формула изобретени Устройство для измерения модуля и , направляющих косинусов вектора главного потокосцепления в машинах переменного тока, содержащее два датчика Холла, вычислитель модуля, выход которого соединен с первой выходной шиной, первый и второй блоки умножения, регулятор, третий, и четвертый блоки умножения, выходы которых соединены-.с первыми входами соответственно первого и второго интег рирующих усилителей, выходы которых подключены к второй и третьей выходным шинам и соединены с первыми входами четвертого и третьего блоков умножения соответственно и с первыми входами первого и второго блоков умножения, отличающееся тем, что, с цепью расширения динамического диапазона и повышения точности, в него введены первый и второй операционные усилители, апериодический усилитель, вычислитель квадрата модуля, пропорционально-интегралр..ный регулятор, пятый, шестой и седьмой блоки умножения и вычислитель абсолютного значения, причем выходы датчиков Холла соединены с входами первого и второго операционных уошителей, выходы которых соединены с входами вь-тчислителя МОДУ71Я и с вторлми входами первого и BTopoix) блоков умножения, выходы которых соединены с входами регулятора, выходом подключенного через апериодический усилитель к вторым входам третьего и йетврруого блож;о& ;умножеЕия, выходы первого и второго т1т-егрируюпшх устшв тепей соединены с первыми 1жодами соответственно пятого и шестого блоков ножения и с входами вычиотителя квац« рата модуля, выходом соедиванного с iispBbnvi входом пропортгонал1эно-интеграль ного рэгупятора, второй вход которого соединен с шиной задания амплитуды, первый вход вычислителя абсолютного значения подключен к вторым входам третьего и четвертого;€лаков умножения, второй вход- с жиной смещающего напряжения, а выходс первым входом седьмого блока умножения, второй вход которого соединен с выходом пропорвдгонально-интегрального регулятора, а выход подключен к вторым . входам пятого и шестого блоков умножвгг ния, выходы которых соединены соответственно с вторыми входами Первого и второго интегрируюпгах уситггелей. Источники информатга, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 767034, кл. Q 01 R 33/02, 14.06,76 14.06.76. 2. Патент ФРГ № 2019263, кл. G, 01 R 33/02, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока | 1987 |
|
SU1594464A1 |
| Управляемый генератор гармоноческих сигналов | 1980 |
|
SU858010A1 |
| Управляемый генератор гармонических сигналов | 1988 |
|
SU1624485A1 |
| Управляемый генератор гармонических сигналов | 1978 |
|
SU769563A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Управляемый генератор гармонических сигналов | 1976 |
|
SU642724A1 |
| Система автоматического регулирования загрузки мельницы | 1982 |
|
SU1255207A1 |
| Устройство для определения параметров главного потокосцепления машины переменного тока | 1985 |
|
SU1319219A1 |
