Изобретение относится к транснорту, в частности к устройствам для фиксации грузов на транспортных средствах или в крупнотоннажных контейнерах.
Цель изобретения - повышение надежности и ускорение крепления груза.
На фиг. 1 схематически изображено предлагаемое устройство, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3 (в положении, при котором 10 винт зафиксирован); на фиг. 5 - разрез Г-Г на фиг. 4 (в положении, при котором винт свободен).
Устройство содержит закрепленные на платформе ограждения кузова 1 с возмож- ..g ностью поворота в поперечной вертикальной плоскости рычаги 2, на верхнем конце которых свободно посажен прижим 3. К прижиму 3 и рычагу 2 шарнирно присоединен винт 4 с резьбой. Винт 4 размеКогда рычаг управления 10 наход ится в начальной точке А участка 11 паза, обойма 7 находится в таком положении, при котором цилиндрические поверхности 17 полугаек 8 контактируют с цилиндрическими поверхностями 15 корпуса 6, а полугайки 8 под действием пружин 9 разведены одна относительно другой, в результате чего винт 4 свободен. Прижим 3 вручную за рукоятку 19 подводят в требуемое положение, определяемое по меткам 20 на винте 4, перемещающегося в механизме 5 фиксации, который при этом поворачивается на цапфах 13 в подшипниках 14. После этого при переводе управляющего рычага 10 в точку Б участка 11 паза обойма 7 с поиту- гайками 8 перемещается вдоль корпуса 6. Конические поверхности 18 полугаек 8 при этом взаимодействуют с коническими поверхностями 16 корпуса 6, а полугайки 8 перемещаются к оси винта 4 и резьба полущен в механизме 5 фиксации, шарнирно за- 20 гаек вводится в зацепление с резьбой вин- крепленном на боковом ограждении кузова 1.та 4, фиксируя винт. Затем управляю10. заводится на участок 12
Механизм 5 фиксации винта 4 включает в себя корпус 6, обойму 7 с двумя полугайками 8, размещенными в окнах обоймы 7 для совместного продольного перемещения. Между полугайками 8 установлены пружины 9. Управляющий рычаг 10, закрепленный в обойме 7, размещен в пазу, выполненном в корпусе 6. Паз имеет два участка: участок 11, расположенный вдоль оси
щии рычаг Ш. заводится на участок паза. После загрузки грузов 22 с их другой стороны подводится соответствующий противоположный прижим. Фиксация винта противоположного прижима осуществляется аналогично указанному путем перемещения управляющего рычага 10 по участку 11 паза из точки А в точку Б. При дальнейшем перемещении рычага 10 по участку 12
винта 4 и направленный в сторону при- зо паза происходит вращение обоймы 7 и полужима, и участок 12, расположенный поперекгаек 8, в результате чего винт 4 перемещается в сторону груза до плотного прижима в него. При этом выбираются зазоры, имевшиеся между прижимом 3 и грузом 22, а также другие зазоры в уст- ложную нарезке винта сторону для допол- 35 ройстве. В результате обеспечивается надеж- нительного поджатия прижима при фикса- ная фиксация груза, что повышает его сохран- ции винта 4 механизмом 5. Фор.ма и длина участка 1 1 паза могут быть различными
оси винта.
Участок паза совмещен с концом участка II, расположен в по11ереч}юй плоскости винта 4 и направлен в противопо(винтовой, S-образной или др.) в зависимости от шага резьбы и других факторов. Различной может быть также длина участка 12 паза.
На корпусе 6 имеются цапфы 13, установленные в подшипниках 14 на боковых ограждениях кузова. На внутренней поверхности корпуса 6 выполнены цилиндрические поверхности 15 и конические поверхности 16. На наружной поверхности полугаек 8 также выполнены ответные поверхности 17 и конические поверхности 18. Для перемещения такелажника при погрузке и разгрузке деталей предусмотрены трапы. Перемещение прижима 3 с рычагом 2 осуществля- ют рукояткой 19. На винте 4 имеются метки 20, используемые для установки винта 4 с прижимом 3 в требуемое положение. На прижиме 3 закреплены упругие прокладки 21.
Загрузка и фиксация груза осуществляется следующим образом.
40
ность, а также исключает ударные нагрузки на винт и механизм фиксации со стороны груза, которые .могут возникать в движении при наличии указанных зазоров.
Формула изобретения
Устройстводля крепления штучного груза на транспортном средстве, содержашее крепленные на платформе с возможностью поворота в вертикальной поперечной плоскости рычаги, шарнирно закрепленные на их верхних концах прижимы, взаимодействующие с грузом, и привод, поворота каждого рычага, выполненный в виде винтовой
50 пары, один конец винта которой щарнир- но закреплен на верхнем конце рычага с возможностью поворота в плоскости поворота этого рычага, а гайка - на кузове транспортного средства, отличающееся тем, что, с целью повышения надежности и ус55 корения крепления груза, оно снабжено механизмом фиксации винта, включающим в себя шарнирно закрепленный на кузове с возможностью поворота в указанной плоскости
Когда рычаг управления 10 наход ится в начальной точке А участка 11 паза, обойма 7 находится в таком положении, при котором цилиндрические поверхности 17 полугаек 8 контактируют с цилиндрическими поверхностями 15 корпуса 6, а полугайки 8 под действием пружин 9 разведены одна относительно другой, в результате чего винт 4 свободен. Прижим 3 вручную за рукоятку 19 подводят в требуемое положение, определяемое по меткам 20 на винте 4, перемещающегося в механизме 5 фиксации, который при этом поворачивается на цапфах 13 в подшипниках 14. После этого при переводе управляющего рычага 10 в точку Б участка 11 паза обойма 7 с поиту- гайками 8 перемещается вдоль корпуса 6. Конические поверхности 18 полугаек 8 при этом взаимодействуют с коническими поверхностями 16 корпуса 6, а полугайки 8 перемещаются к оси винта 4 и резьба полугаек вводится в зацепление с резьбой вин- та 4, фиксируя винт. Затем управляю10. заводится на участок 12
щии рычаг Ш. заводится на участок паза. После загрузки грузов 22 с их другой стороны подводится соответствующий противоположный прижим. Фиксация винта противоположного прижима осуществляется аналогично указанному путем перемещения управляющего рычага 10 по участку 11 паза из точки А в точку Б. При дальнейшем перемещении рычага 10 по участку 12
паза происходит вращение обоймы 7 и полугаек 8, в результате чего винт 4 перемещается в сторону груза до плотного прижима в него. При этом выбираются зазоры, имевшиеся между прижимом 3 и грузом 22, а также другие зазоры в уст- ройстве. В результате обеспечивается надеж- ная фиксация груза, что повышает его сохран-
паза происходит вращение обоймы 7 и полугаек 8, в результате чего винт 4 перемещается в сторону груза до плотного прижима в него. При этом выбираются зазоры, имевшиеся между прижимом 3 и грузом 22, а также другие зазоры в уст- ройстве. В результате обеспечивается надеж- ная фиксация груза, что повышает его сохран-
ность, а также исключает ударные нагрузки на винт и механизм фиксации со стороны груза, которые .могут возникать в движении при наличии указанных зазоров.
Формула изобретения
Устройстводля крепления штучного груза на транспортном средстве, содержашее закрепленные на платформе с возможностью поворота в вертикальной поперечной плоскости рычаги, шарнирно закрепленные на их верхних концах прижимы, взаимодействующие с грузом, и привод, поворота каждого рычага, выполненный в виде винтовой
пары, один конец винта которой щарнир- но закреплен на верхнем конце рычага с возможностью поворота в плоскости поворота этого рычага, а гайка - на кузове транспортного средства, отличающееся тем, что, с целью повышения надежности и ускорения крепления груза, оно снабжено механизмом фиксации винта, включающим в себя шарнирно закрепленный на кузове с возможностью поворота в указанной плоскости
корпус с внутренними коническими и цилиндрическими поверхностями и установленную в корпусе с возможностью ограниченного продольного перемещения и поворота вокруг своей оси обойму с рычагом управ-, ления, гайка выполнена разрезной из двух подпружиненных одна относительно другой полугаек с наружными цилиндрическими ,и коническими поверхностями, взаимодействующими с соответствуй щи ми поверхностями корпуса, причем полугайки размещены в
0
выполненных в обойме окнах для совместного перемещения с нею, а для размещения рычага управления в корпусе выполнен фигурный паз, один участок которого расположен вдоль оси винта, и его конец, направленный в сторону прижима, совмещен с другим, расположенным в поперечной плоскости винта и направленным в противоположную его нарезке сторону для .дополнительного поджатия прижима при перемеще- НИИ обоймы с гайкой в корпусе.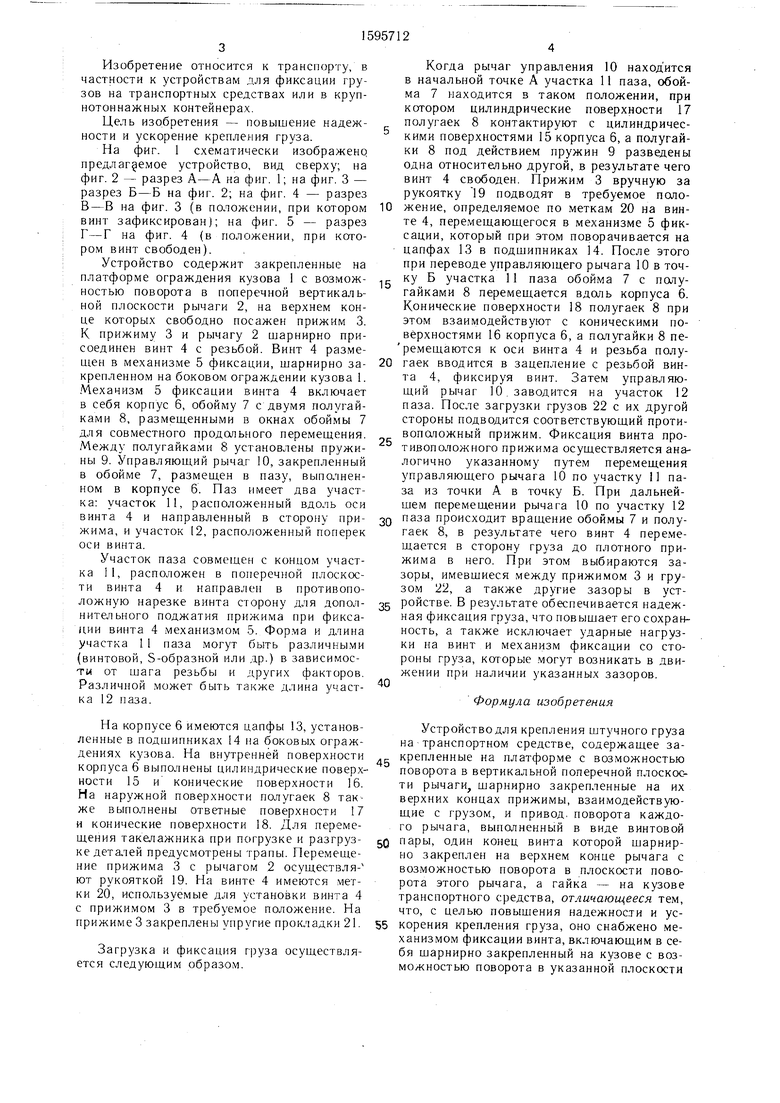
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ | 1993 |
|
RU2090792C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ЭЛАСТИЧНЫЙ ВИНТОВОЙ МЕХАНИЗМ | 1995 |
|
RU2140591C1 |
| Прецизионные тиски | 1988 |
|
SU1551531A1 |
| Устройство для укладки проволоки | 1981 |
|
SU1005975A1 |
| Шариковый винтовой механизм | 1985 |
|
SU1263947A1 |
| Планетарная передача винт-гайка качения | 1986 |
|
SU1395883A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЛОПАСТИ | 2020 |
|
RU2742357C1 |
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА | 2002 |
|
RU2204070C1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| Устройство для разметки | 1982 |
|
SU1130455A1 |


Изобретение относится к транспорту. Цель изобретения - повышение надежности и ускорение крепления груза. Устройство содержит закрепленные на платформе с возможностью поворота в вертикальной поперечной плоскости рычаги 2, на их верхних концах шарнирно закреплены взаимодействующие с грузом прижимы 3 привода поворота каждого рычага. Привод поворота рычага выполнен в виде винтовой пары, конец винта 4 которой шарнирно закреплен на верхнем конце рычага. Гайка выполнена из двух подпружиненных одна относительно другой полугаек, установленных в обойме механизма 5 фиксации. Механизм фиксации позволяет быстро подводить и отводить от груза прижимы 3 и надежно фиксировать их в рабочем положении, поджимая прижим к грузу. 5 ил.
Фи.1
Фиг.З
Фиг.
В - в
18 7
Прйдольный
)(0а pbtwsa /
г - г
Фиг. 5
| Устройство для перевозки в вертикальном положении крупноразмерных строительных деталей в пакетах | 1958 |
|
SU116521A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
