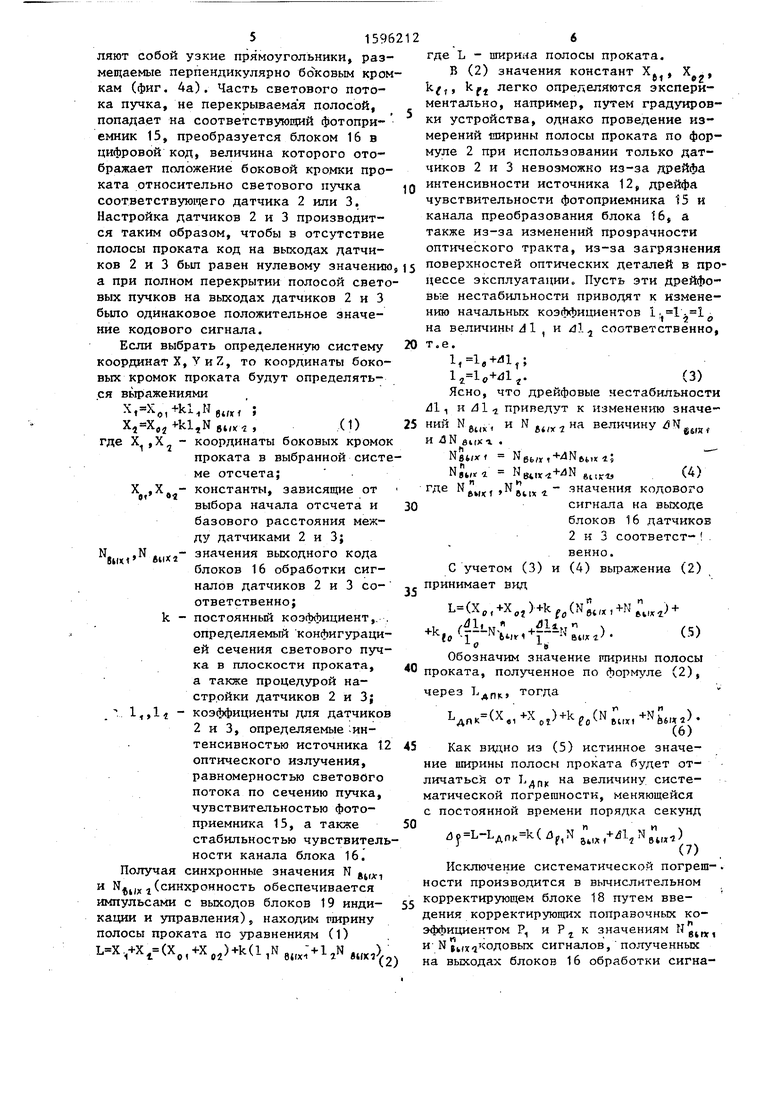
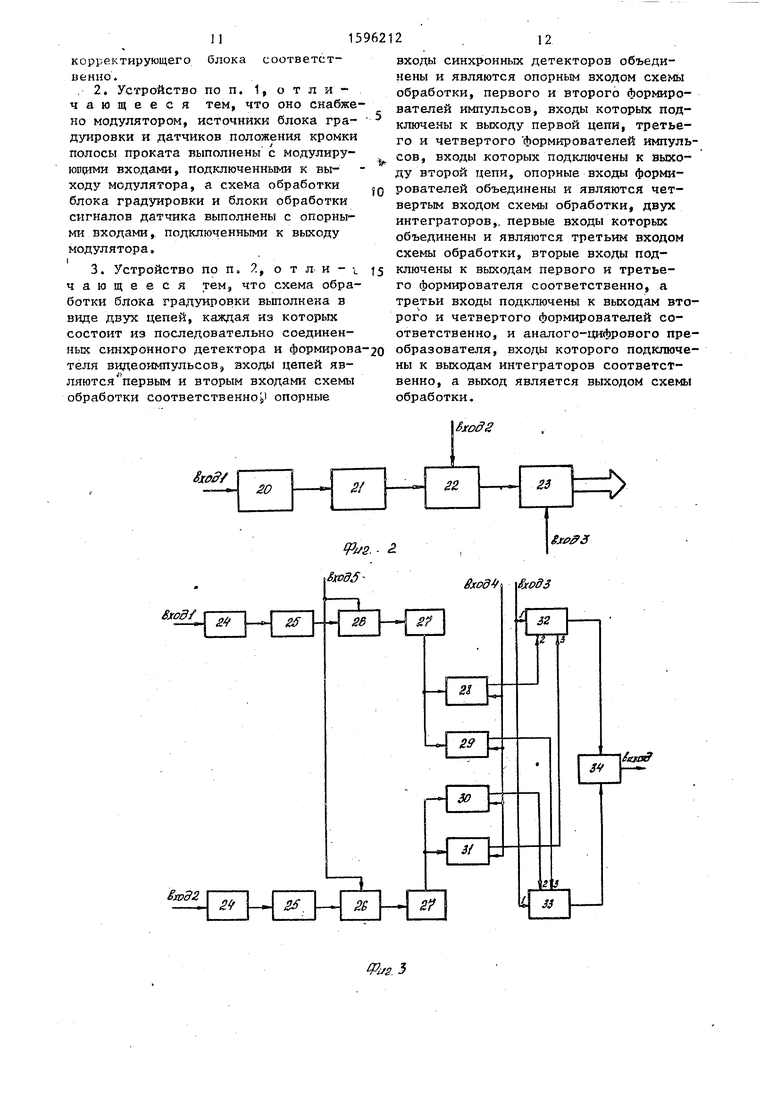
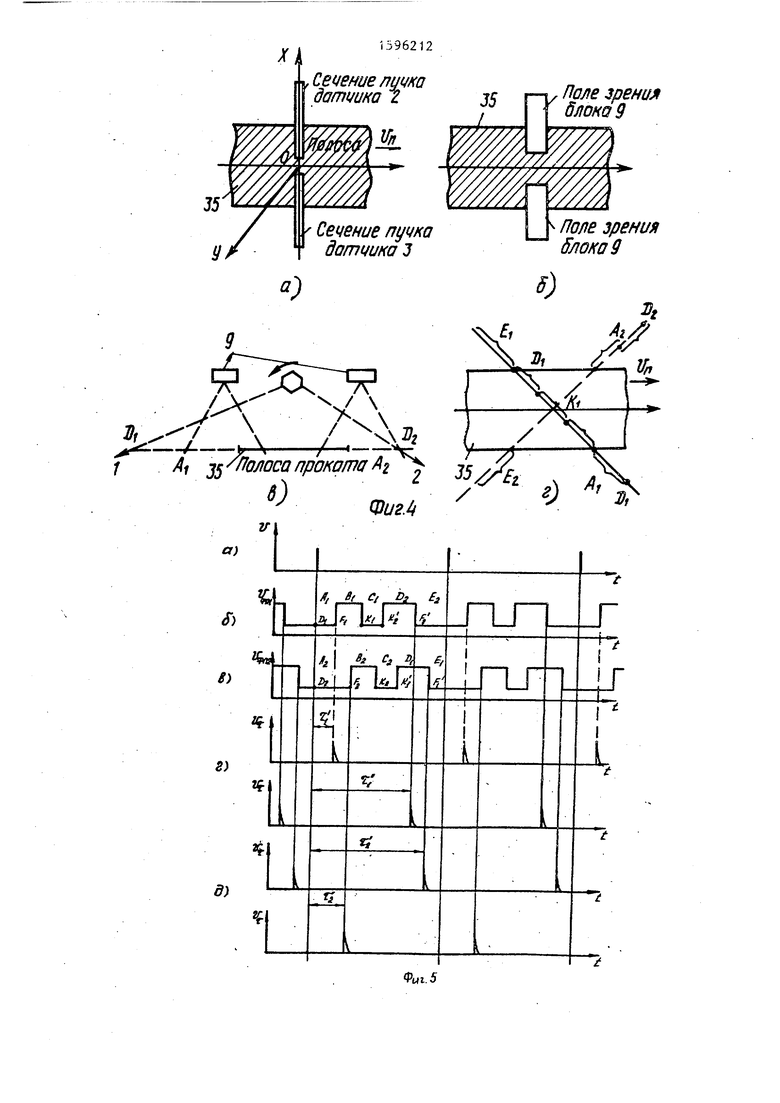
Изобретение относится к контрольно измерительной технике и может быть использовано для измерения ширины листовых материалов. Цель изобретения повышение точности и быстродействия за счет применения датчиков положения боковой кром ки без дискретного сканирования, Ма фиг. 1 представлена блок-схема npe; yiaraeMoro устройства; на фиг.2 блок-схема блока обработки датчика положения кромки; на фиг. 3 - то же, блока обработки блока градуировки; на фиг. 4 - расположение фотоприемников относительно .измеряемой полосы проката; на фиг. 5 - временные диаграммы работы блоков устройства. Устройство состоит из блока 1 градуировки и двух одинаковых датчиков 2 и 3 положения, предназначенных для оптической связи с противоположными кромками полосы проката, блок 1 градуировки состоит из оптически связанных источника 4 оптического излучения, расщепителя 5 и развертывающего блока б с датчиком 7 угловой скорости, оптически связанных приемной оптической системой 8, предназначенной для оптической -связи с блоком 6 через полосу проката, и фотоприемного блока 9, состоящего из фотоэлементов, сх мы 10 обработки, первый и второй вхо ды которого под1 лючены к выходам фотоприемного блока, а третий вход под ключен к выходу датчика 7 и схемы 11 синхронизации, вход которой подключе к синхронизирующему выходу блока 6, а первый выход подключен к четвертому входу схемы 10. Каждый из датчиков 2 и 3 состоит из оптически связанных источника 12 оптического излу чения и лередаюп ей оптической систем 13,, оптически связанных приемной оптической системы 14, предназначенной для оптической связи с системой 13 через полосу проката, и фотоприемника 15, и блока 16 обработки, первый вход которого подключен к выходу фот приемника 15, а второй вход объедине с управляющим входом источника 12 и представляет собоймодулируюрдий вход датчиков 2 и 3. Устройство также состо ит из модулятора 17, выход которого подключен к модулируюрщм входам датч ков 2 и 3, управляющему входу источн ка 4 и пятому входу схемы 10, вычислительного корректирующего блока 18, первьгй и второй входы которого подключены к выходам блоков 16, датчиков 2 и 3 соответственно, третий вход подключен к второму выходу схемы 11 синхронизации, а четвертый выход подключен к выходу схемы 10, и блока 19 индикации и управления, вход которого подключен к выходу блока 18, а первый, второй и третий выходы подключены к третьим входам блока 16, датчиков 2 и 3 и пятому входу блока 18. Блок 16 обработки состоит из последовательно соединенных схемы 20 сглаживания, вход которой является входом блока 16, схемы 21 нормирования, синхронного детектора 22, опорный вход которого является вторым входом блока 16, и аналого-цифрового преобразователя 23, вход запуска которого является третьим входом блока 16, а выход является выходом блока 16. Схема 10 обработки состоит из двух идентичных цепей, каждая из которых состоит из последовательно соединенных согласующего каскада24, узкополосного усилителя 25,. синхронного детектора 26 и (усилителя) формирователя 27 видоимпульсов, входы цепей являются первым и вторым входами схемы 10, опорные входы детекторов 26 объединены и являются пятьтм входом схемы 10, формирователей 28 и 29 импульсов, входы которых подключены к выходу первой цепи, формирователей 30 и 31 импульсов, входы которых подключены к выходу второй цепи, опорные входыформирователей 28 - 31 импульсов объединены и являются четвертым входом схемы 10, интеграторов 32и 33, первые входы которых объединены и являются третьим входом схемы 10, вторые входы подключены к выходам формирователей 28 и 30 соответственно, а третьи входы подключены к выходам формирователей 29 и 31 со- . ответственно и аналого-цифрового преобразователя 34, входы которого подключены к выходам интеграторов 32 и 33соответственно, а выход является выходом схемы 10. Устройство работает следующим образом. Оптические системы 13 датчиков 2 и 3 формируют оптическое модулированное излучение источников 12 таким образом, что сечения световых пучков в плоскости полосы проката представ5159ляют собой узкие прямоугольники, раз мещаемые перпендикулярно боковым кро кам (фиг. 4а). Часть светового потока пучка, не перекрываемая полосой, попадает на соответствующий фотоприемник 15, преобразуется блоком 16 в цифровой код, величина которого отображает положение боковой кромки про ката относительно светового пучка соответствующего датчика 2 или 3. Настройка датчиков 2 и 3 производится таким образом, чтобы в отсутствие полосы проката код на выходах датчиков 2 и 3 был равен нулевому значени а при полном перекрытии полосой свет вых пучков на выходах датчиков 2 и 3 было одинаковое положительное значение кодового сигнала. Если выбрать определенную систему координат X, У иZ, то координаты боко вых кромок проката будут определяться вьфажениями X,X,+kl,Ng,,, ; X.,X,j,+kl,Nei.-i, (1) где X ,X - координаты боковых кромо проката в выбранной сист ме отсчета; X ,Х - константы, зависящие от выбора начала отсчета и базового расстояния между датчиками 2 и 3; N. ,N ....- значения выходного кода В11« . ,- - блоков 16 обработки сигналов датчиков 2 и 3 соответственно;k - постоянный коэффициент,, определяемый конфигураци ей сечения светового пуч ка в плоскости проката, а также процедурой настройки датчиков 2 и 3; . 1 , 14 - коэффициенты для датчико 2 и 3, определяемые интенсивностью источника 1 оптического излучения, равномерностью светового потока по сечению пучка, чувствительностью фотоприемника 15, а также стабильностью чувствител ности канала блока 16. Получая синхронные значения N jj,;, и , J (синхронность обеспечивается импульсами с выходов блоков 19 индикации и управления), находим гаирину полосы проката по уравнениям (1) ./x(x,4-x,)-.k(i,N в,„;-ы,н ,,,,,) где L - ширина полосы проката. В (2) значения констант X. , X ., k,, kfj легко определяются экспериментально, например, путем градуировки устройства, однако проведение измерений ширины полосы проката по формуле 2 при использовании только датчиков 2 и 3 невозможно из-за дрейфа интенсивности источника 12, дрейфа чувствительности фотоприемника 15 и канала преобразования блока 16, а также из-за изменений прозрачности оптического тракта, из-за загрязнения поверхностей оптических деталей в процессе эксплуатации. Пусть эти дрейфовые нестабильности приводят к изменению начальных коэффициентов l. на величины d 1 и /л1 соответственно, т.е. 1,1,,; . Ясно, что дрейфовые нестабильности /111 и /31 7 приведут к изменению значений Ng,., и t,,nл величину Ng,, и ЛН вкха . Nei/x-f Нвь,г,+лКбиг ; Nenti Ne4,y,j+4N gj;. значения кодового I 61IX 4 сигнала на выходе блоков 16 датчиков 2 и 3 соответст- . венно. (4) выражение (2) С учетом (3) и принимает вид L(X,,-bX,)H-kf(Ne +, r-il-M to-Л Ьчм+т ВИХ4-ООбозначим значение гаирины полосы проката, полученное по формуле (2), через тогда ...). АПК(Х Как ВН1ЩО из (5) истинное значение ширины полосы проката будет отличаться от Т.дп на величину систематической погрешности, меняющейся с постоянной времени порядка секунд dy L-LAnK k(p,N 1,,, Исключение систематической погрет- ности производится в вычислительном корректирующем блоке 18 путем введения корректирующих поправочных; коэффициентом Р, и PJ к значениям Ng, и- N iij кодовых сигналов, полученных на выходах блоков 16 обработки сигналов датчиков 2 и 3 в соответствии с формулой, получаемой на основе ана лиза выражения (5) L(X,,,p4-k J(uf-4N;,,,+()N 1 кихг -о Значения поправочных коэффициентов Р, и Р определяются после нахож дения значений N д,,, и N gt, градуировки по формулам, полученным из (4), (5), (8). лп N 1.1. р Нв(НГ2. dl N™ гГ 17 Выражение (8) с учетом обозначений (9) принимает вид (10) +Р N Л-Ч- 5 5(,lXt Нахождение значений Р. и Р осуществляется при каждом измеритель ном цикле блока 1 градуировки. Измерение значений N ац, euif 2 A о ределения коэффициентов Р и Р по формулам (9) происходит следующим образом. Выходное синусоидальное напряжени модулятора 17 модулирует интенсивность оптического излучения источника 4 о Модулированный световой луч расщепляется расщепителем 5 на два световьк луча, которые после прохождения развертывающего блока 6 совершают поперечные сканирующие перемещения по отногаению к полосе проката в пределах измерительной зоны, при этом траектории световых пятен на прокатываемой движутдейся полосе 35 от этих лучей будут наклонены под не которым углом, зависярцгм от скорости движения полосы, к направлению движения полосы. В момент входа лучей в измеритель ную зону развертывающий блок 6 гене рирует опорные импульсы, которые по ступают на схему 11 синхронизации и служат для обработки сигналов, полу5 чаемьпс от блока 9, Обозначим точки, в которых перес кают плоскость проката первый и вто рой лучи в момент прихода опорного импульса, через D и D соответстве но (фиг. 4), Совершая поперечные ск нирующие перемещения, лучи входят в измерительнзто зону и перемещаются в областях А и А., При этом на блоке 9, в апертуре которого находятся изображения обла ти кромок полосы проката (фиг.4б), выходной сигнал отсутствует (фиг. 56 и в) поскольку лучи проходят за пределами полосы проката и не отражаются от ее поверхности (фиг. 4в). Пусть первый и второй лучи достигают первых боковых кромке проката в точках F и F,2 (фиг. 4г) и соответственно (фиг. 56 и в). Перемещаясь далее, они попадают на поверхность полосы, отражаются от поверхности полосы и регистрируются фотоэлементами блока 9, перемещаясь в областях В и В,. В некоторой точке К первьй луч Kj второй луч выйдут из ПОЛЯ и зрения (части плоскости, в которой находится прокатываемая полоса, ограниченной угловой апертурой блока 9) фотоэлементов блока 9 и в областях С и С. выходного фотосигнала не будет. В точке первый луч и точке второй луч снова попадут в поле зрения, но уже других фотоэлементов блока 9 (области D и Dj). Когда лучи достигнут в точках F J и F вторых кромок прокатываемой полосы, выходные сигналы на выходе блока 9 пропадут (области Е и F-) так как лучи будут перемещаться вне полосы. Схема 10 обработки производит измерение временных интервалов, содержащих информацию о положениях первой и второй боковых кромок полосы, т.е. значениях , и N 8,;. Выявление необходимой информации производится следуюпщм образом. Поскольку второй и первый лучи развертываются одним устройством с жесткими постоянными связями, то мгновенные значения угловых скоростей их перемещения одинаковы tu, 00 tU Поэтому угловое положение первой боковой кромки будет при измерении первым лyчo, 1 жения первой боковой кромки полосы; Чсг .- угловые положения первого и второго лучей соответственно в момент прихода опорного импульса. Определение fj и Г ясно из гра фика на фиг. 5г. Совершенно аналогич но для углового положения второй боковой кромки при измерении первым лу чом г V 1 при измерении вторым лучом /1 t I . при нахождении среднего из (14) и i±. . IJ dt, (16 где Q , , tf - значения углового положения второй бо ковой кромки полосы определение f и ясно из фиг.5д. . А ,V1 Ucf+ fei Положим, что значение нулю, соответствуюп ий луч пересекает плоскость полосы в точке О началу координатной оси ОХ (фиг. 4а), а ось развертьшающего устройства проходит через точку оси OY с координатой, ра ной. Т. В случае , t, fi 1,- i I wdt; (/ r Ja)dt. (17) x1 - L Соответственно ширина полосы про- ката будет InI Г| (ctgr UJ dt+ctgr ) codt). ( . Сравнение вьфажения (18) с выражением (2) дает уравнения для нахождения и N gH; искомых значений N Tctgrj W .,,N i-t t X -bkj/,,,,. (19) Параметры Т, X(,,% -o определяются при проведении операции начальной настройки устройства, а также по известным размерам его конструкции. Таким образом, схема 10 обработки производит измерение угловых положеНИИ Ц), и боковых кромок полосы в соответствии с формулами (17) и передает эти значения в вычислительной корректирующий блок 18, в котором по 159 (15 формулам (19) и (9) вычисляются значения поправочных коэффициентов F, и Pj и до окончания следующего измерительного цикла блока 1 градуировки найденные значения Р, и Р остаются неизменньп ш и используются для корректировки значений ширины полосы, находимь.гх по показаниям по показаниям датчиков 2 и 3 по формуле (10). Формула изобретения 1. Устройство для измерения ширины полосы проката, содержащее два датчика положения кромки полосы проката, каждый из которых состоит из источника излучения и фотсприемника, предназначенного для оптической связи с соответствующей кромкой полосы проката, и блок управления, отличающееся тем, чтор с целью повышения точности и быстродействия, оно снабжено блоком градуировки, выполненным в виде: оптически связанных источника излучения, расщепителя и развертывающего блока с датчиком угловой скорости, и оптически связанных приемной оптической системы, предназначенной для оптической связи с развертываюш м блоком через полосу проката, и фотоприемного блока, схемы обработки блока градуировки, первые два входа которой подключены к выходам фотоприемного блока, третий вход подключен к выходу датчика угловой скорости, и схемы синхронизации, вход которой подключен к синхронизирующему выходу развертывающего блока, а первый выход подключен к четвертому входу схемы обработки блока градуировки, вычислительным корректирующим блоком, информационные входы Которого подключены к выходам датчиков положения кромки полосы проката и вькоду схемы обработки блока градуировки, а синхронизирующий вход подключен к второму выходу схемы синхронизации, каждый датчик положения кромки полосы проката снабжен оптической системой формирования узкой световой полосы, оптически связанной с источником излучения, и блоком обработки сигналов датчика, вход которого подключен к выходу фотоприемника, а выход является выходом датчика, блок управления выполнен с тремя выходами, подключенными к управляющим входам блоков обработки сигналов датчиков и вьмислительного корректирующего Олока соответственно. , 2, Устройство по п. 1, отличающееся тем, что оно снабже но модулятором, источники блока градуировки и датчиков положения кромки полосы проката выполнены с модулируюп(ими входами. Подключенными к выходу модулятора, а схема обработки блока градуировки и блоки обработки сигналов датчика выполнены с опорными входами, подключенными к выходу модулятора. 3. Устройство по п. ., о т л и чающееся тем, что схема обра ботки блока градуировки выполнена в виде двух цепей, каждая из которых состоит из последовательно соединенных синхронного детектора и формиров теля видеоимпульсов, входы цепей являются первым и вторым входами схемы обработки соответственно , опорные
Ixoff/ 8ход/ 1
2 . 12 входы синхронных детекторов объединены и являются опорным входом схемы обработки, первого и второго формирователей импульсов, входы которых подключены к выходу первой цепи, третьего и четвертого формирователей импульсов, входы которых подключены к выходу второй цепи, опорные входы формирователей объединены и являются четвертым входом схемы обработки, двух интеграторов,, первые входы которых объединены и являются третьим входом схемы обработки, вторые входы подключены к выходам первого и третьего формирователя соответственно, а третьи входы подключены к выходам второго и четвертого формирователей соответственно, и аналого-цифрового преобразователя, входы которого подключены к выходам интеграторов соответственно, а выход является выходом схемы обработки. Uxo02 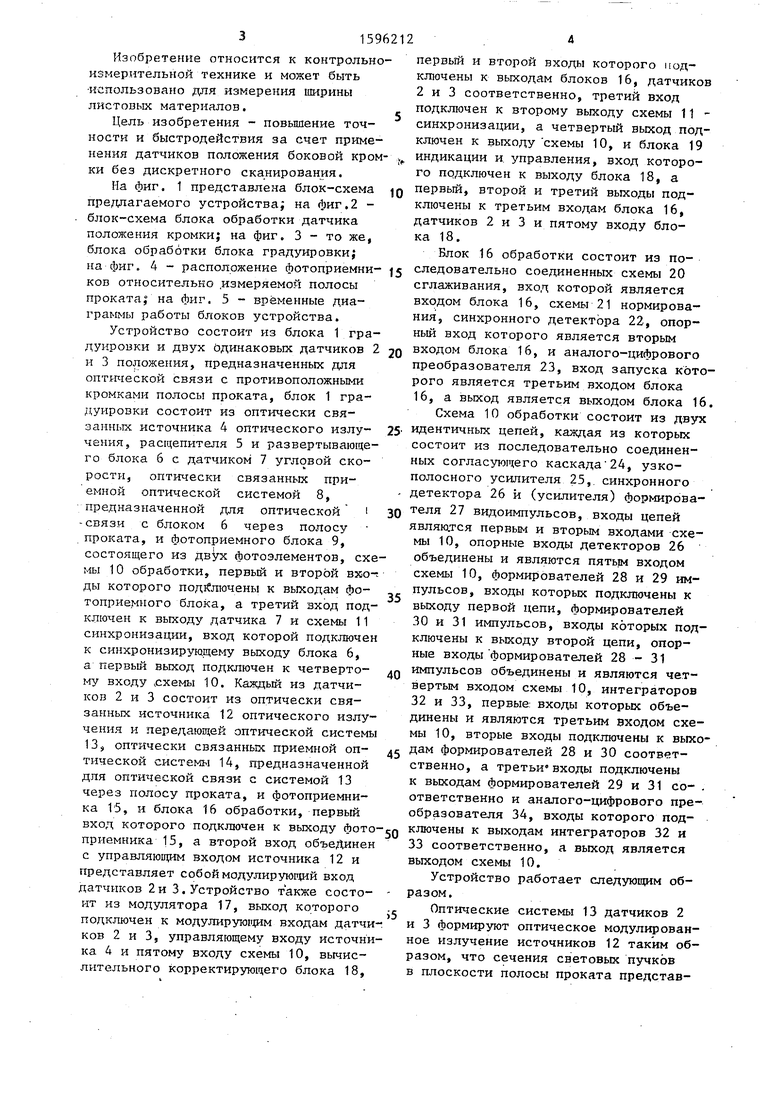
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ НЕПЛОСКОСТНОСТИ ЛИСТОВЫХ ИЗДЕЛИЙ И СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2254556C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ И ФОРМЫ МЕТАЛЛУРГИЧЕСКИХ ИЗДЕЛИЙ | 1995 |
|
RU2098755C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| Механический дефлектор | 1985 |
|
SU1314297A1 |
| Устройство для определения положения и ориентации объекта | 1988 |
|
SU1536204A1 |
| УСТРОЙСТВО ДЛЯ ГРАДУИРОВКИ СРЕДСТВ ИЗМЕРЕНИЙ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2010236C1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |
| Устройство для центрирования полосы относительно оси прокатки на непрерывном широкополосном прокатном стане | 1981 |
|
SU975129A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышение точности и быстродействия за счет применения датчиков положения боковой кромки без дискретного сканирования. Устройство состоит из блока 1 градуировки и датчиков 2 и 3 положения, предназначенных для оптической связи с противоположными кромками полосы проката, и корректирующего вычислительного блока 18, электрически связанного с блоком 1 и датчиком 2 и 3. Положение кромок полосы проката непрерывно измеряется датчиками 2 и 3, сигнал с выхода которых периодически корректируется в блоке 18 по сигналам от блока градуировки. 2 з.п.ф-лы, 5 ил.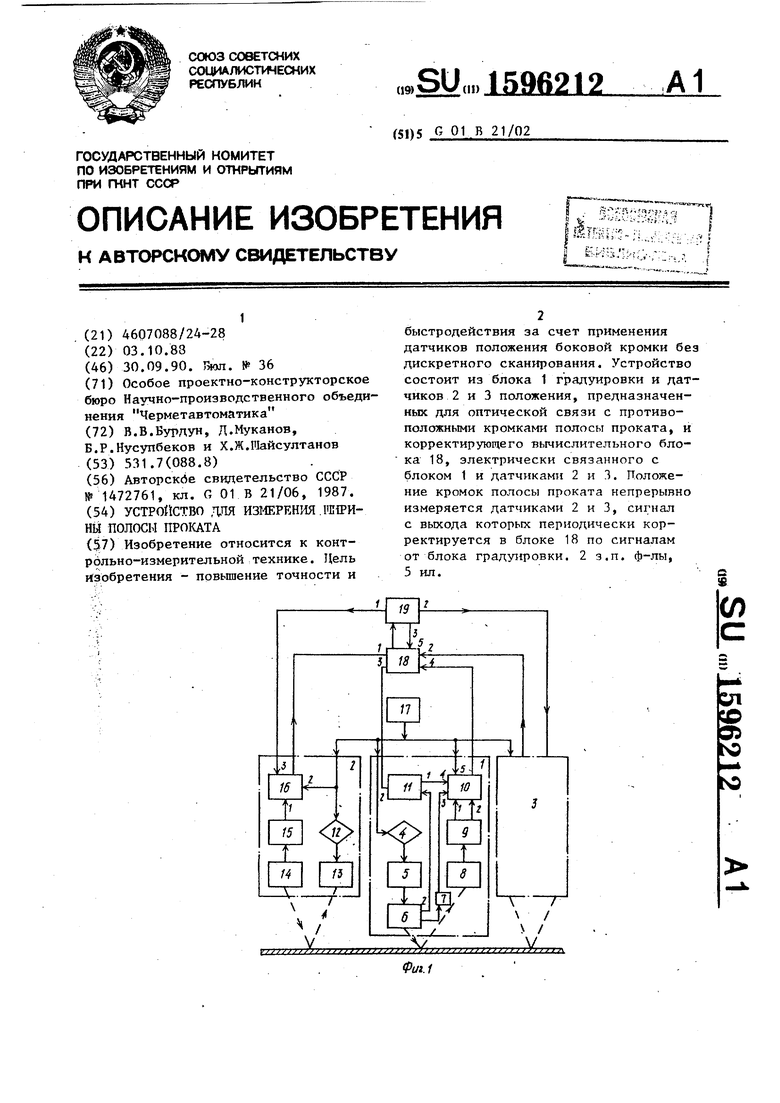
| Устройство для измерения размеров движущихся материалов | 1987 |
|
SU1472761A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
