Изобретение относится к контрольно-измерительной технике и может найти применение для бесконтактного измерения и контроля геометрических параметров компрессорных и турбинных лопаток и других подобных изделий сложной формы.
Установление уровня техники.
На основе анализа материалов фонда патентной и другой научно-технической литературы авторами установлено, что основными конструктивными элементами оптоэлектронных устройств контроля профиля пера лопаток являются: неподвижное горизонтальное основание, вертикальные стойки, размещенные на основании, каретки, также размещенные на основании и выполненные с возможностью перемещения вдоль координаты X, Y или Z системы координат устройства, приводы для перемещения указанных кареток, соответствующие датчики линейного перемещения, оптоэлектронные головки для измерения дальности, источник и приемник светового излучения, работающие в режиме «свет-тень», средство для крепления контролируемой лопатки и персональную электронную вычислительную машину (ПЭВМ). Однако такие устройства характеризуются рядом недостатков.
Известно, например, оптоэлектронное устройство контроля профиля объекта [1], содержащее неподвижное горизонтальное основание, снабженное двумя приводами для перемещения контролируемого изделия параллельно осям координат Х и Y устройства и двумя датчиками линейных перемещений для измерения данных перемещений, оптически сопряженные источник оптического излучения, размещенный над горизонтальным основанием, и приемник оптического излучения, размещенный под горизонтальным основанием, блоки фиксации координат, информационные входы которых подключены к выходам соответствующих датчиков линейных перемещений, а управляющие входы - к выходу приемника оптического излучения, и персональную электронную вычислительную машину (ПЭВМ), первые и вторые информационные входы которой соединены с соответствующими выходами блоков фиксации координат, а первый и второй управляющие выходы подключены к указанным приводам.
Недостатком такого устройства является низкая достоверность результатов контроля размеров изделий из-за невысокой точности выделения границы «свет-тень».
Известно также оптоэлектронное устройство контроля профиля пера лопатки [2], содержащее неподвижное горизонтальное основание, на котором закреплена вертикальная стойка, первую каретку, установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Х системы координат устройства и первым датчиком линейного перемещения, вторую каретку, установленную на первой каретке и снабженную приводом перемещения вдоль координаты Y системы координат устройства и вторым датчиком линейного перемещения, измеритель дальности, закрепленный на вертикальном кронштейне и состоящий из источника узкого светового луча, например лазера, интегрального многоэлементного фотоприемника и объектива, установленного с возможностью обеспечения триангуляционной оптической связи фотоприемника с источником узкого светового луча через контролируемую поверхность пера лопатки и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам фотоприемника измерителя дальности и датчиков линейных перемещений, а выходы ПЭВМ соединены со входами приводов первой и второй кареток.
Такое устройство характеризуется низкой точностью измерений вследствие значительной деформации (прогиба) пера лопатки под действием собственного веса. Это вызвано позиционированием лопатки при измерениях в плоскости XOY системы координат устройства, при котором ее перо прогибается максимальным образом.
Известно также оптоэлектронное устройство контроля профиля пера лопатки [3], содержащее неподвижное горизонтальное основание, поворотный стол, установленный на неподвижном горизонтальном основании и снабженный приводом вращения его вокруг оси, параллельной оси Z системы координат устройства, и средством закрепления решетки с лопатками, каретку, также установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Y системы координат устройства и датчиком линейного перемещения, средство измерения, установленное на каретке и содержащее оптически сопряженные источник и приемник оптического излучения и привод узла его наклона в плоскости, параллельной плоскости XOZ системы координат устройства, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам приемника оптического излучения, датчика углового положения узла наклона и датчика линейного перемещения каретки, а выходы соединены с приводами перемещения каретки и узла наклона средства измерения.
Такое устройство также характеризуется низкой точностью измерений, которая обусловлена относительно большой деформацией (прогибом) пера лопатки под действием собственного веса в процессе измерений.
Известно также оптоэлектронное устройство контроля профиля пера лопатки, содержащее неподвижное горизонтальное основание, на котором установлена вертикальная стойка, первую каретку с прямоугольным пазом посередине, размещенную на неподвижном горизонтальном основании и снабженную приводом перемещения вдоль координаты Х системы координат устройства и первым датчиком линейного перемещения, вторую каретку с прямоугольным пазом посередине, установленную на первой каретке и снабженную приводом перемещения вдоль координаты Y системы координат устройства и вторым датчиком линейного перемещения, поворотный стол, установленный на второй каретке и снабженный приводом вращения вокруг оси, параллельной оси Y системы координат устройства, датчиком угловых перемещений и средством закрепления лопатки, измеритель дальности, закрепленный на вертикальной стойке и состоящий из источника узкого светового луча, например лазера, интегрального многоэлементного фотоприемника и объектива, установленного с возможностью обеспечения триангуляционной оптической связи фотоприемника с источником узкого светового луча через контролируемую поверхность пера лопатки, фотоэлемент, оптически сопряженный с источником узкого светового луча измерителя дальности и размещенный в углублении горизонтального основания под первой кареткой и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам интегрального многоэлементного фотоприемника измерителя дальности, фотоэлемента и датчиков линейных и углового перемещений, а выходы ПЭВМ соединены со входами приводов первой и второй кареток и поворотного стола [4].
Такое устройство также характеризуется относительно низкой точностью измерений, и, следовательно, относительно низкой достоверностью результатов контроля, что вызвано значительным прогибом пера лопатки под действием собственного веса в процессе измерений.
Наиболее близким изобретением к предлагаемому по технической сущности и схемному решению является оптоэлектронное устройство контроля профиля пера лопатки, описанное в [5].
Такое устройство, выбранное в качестве прототипа, содержит неподвижное горизонтальное основание, две вертикальные стойки, размещенные на основании по разные стороны от контролируемой лопатки, первую каретку, размещенную на неподвижном горизонтальном основании с возможностью перемещения между вертикальными стойками параллельно оси «X» системы координат устройства и снабженную первым датчиком линейных перемещений и первым приводом, вторую и третью каретки, размещенные на вертикальных стойках с возможностью перемещения параллельно оси «Z» системы координат устройства и снабженные соответственно вторым и третьим датчиками линейных перемещений и вторым и третьим приводами, оснастку для установки лопатки, размещенную на первой каретке и выполненную с возможностью обеспечения жесткого позиционирования пера лопатки в вертикальной плоскости, первую и вторую оптоэлектронные головки, размещенные соответственно на второй и третьей каретках и образованные каждая из источника узкого светового луча, например лазера, многоэлементного фотоприемника, снабженного блоком развертки и формирования кода, и объектива, причем объективы оптоэлектронных головок установлены с возможностью обеспечения триангуляционной оптической связи фотоприемников с источниками узкого светового луча через соответствующую поверхность пера контролируемой лопатки, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам датчиков линейных перемещений и многоэлементных фотоприемников оптоэлектронных головок устройства, а выходы соединены с приводами устройства.
Эксплуатация такого устройства показала, что оно характеризуется низкой достоверностью результатов контроля. Это связано с тем, что на кромке пера радиус кривизны его поверхности резко меняет свое значение. В результате отраженные (рассеянные) от данного участка пера лучи источника оптоэлектронной головки также резко меняют свое направление, искажаются. Как следствие, в памяти ПЭВМ формируются данные о ложных фрагментах контура сечения пера лопатки, что является причиной неточных измерений и, как следствие, низкой достоверности результатов контроля.
Сущность изобретения.
Изобретение направлено на обеспечение таких технических результатов как повышение достоверности результатов контроля пера лопатки путем усечения (исключения) формируемых в памяти ПЭВМ ложных участков контура пера, а также на снижение количества приводов в устройстве.
Достижение указанных технических результатов обеспечивается тем, что оптоэлектронное устройство контроля профиля пера лопатки, содержащее неподвижное горизонтальное основание, две вертикальные стойки, размещенные на основании по разные стороны от контролируемой лопатки, первую каретку, размещенную на неподвижном горизонтальном основании с возможностью перемещения между вертикальными стойками параллельно оси «X» системы координат устройства и снабженную первым датчиком линейных перемещений и первым приводом, вторую и третью каретки, размещенные на вертикальных стойках с возможностью перемещения параллельно оси «Z» системы координат устройства и снабженные соответственно вторым и третьим датчиками линейных перемещений, оснастку для установки лопатки, размещенную на первой каретке и выполненную с возможностью обеспечения жесткого позиционирования пера лопатки в вертикальной плоскости, первую и вторую оптоэлектронные головки, размещенные соответственно на второй и третьей каретках и образованные каждая из источника узкого светового луча, например лазера, многоэлементного фотоприемника, снабженного блоком развертки и формирования кода, и объектива, причем объективы оптоэлектронных головок установлены с возможностью обеспечения триангуляционной оптической связи фотоприемников с источниками узкого светового луча через соответствующую поверхность пера контролируемой лопатки, второй привод и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам датчиков линейных перемещений и многоэлементных фотоприемников оптоэлектронных головок устройства, а выходы соединены с приводами устройства, содержит также перекладину, соединяющую вертикальные стойки и образующую вместе с ними первый портал, второй портал, вертикальные стойки которого размещены по разные стороны от контролируемой лопатки, причем одна из стоек второго портала закреплена на второй каретке, оптически сопряженные источник и приемник светового излучения, снабженные соответствующими объективами и закрепленные на разных вертикальных стойках второго портала, и гибкую кинематическую связь, выполненную, например, в виде зубчатого ремня и соединяющую вторую и третью каретки, при этом второй привод размещен на перекладине первого портала и снабжен ведущим роликом, взаимодействующим с гибкой кинематической связью, а выход приемника светового излучения подключен ко входу ПЭВМ.
Кроме того, в устройстве на перекладине первого портала установлены ведомые ролики, размещенные по разные стороны от ведущего ролика и взаимодействующие с гибкой кинематической связью.
Проверка условия патентоспособности «новизна».
Проведенный, авторами анализ уровня техники, включающий поиск по патентным и другим научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах устройства, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам устройства, а выделение из перечня аналогов прототипа обеспечило выявление совокупности существенных по отношению к техническим результатам отличительных признаков заявленного устройства.
Основными признаками, отличающими заявляемое устройство от прототипа, являются:
- наличие перекладины, соединяющей вертикальные стойки и образующую вместе с ними первый портал,
- наличие второго портала, вертикальные стойки которого размещены по разные стороны от контролируемой лопатки, причем одна из стоек второго портала закреплена на второй каретке,
- наличие оптически сопряженных источника и приемника светового излучения, снабженные соответствующими объективами и закрепленные на разных вертикальных стойках второго портала,
- наличие гибкой кинематической связи, выполненной, например, в виде зубчатого ремня и соединяющую вторую и третью каретки, - размещение второго привода на перекладине первого портала и снабжение его ведущим роликом, взаимодействующим с гибкой кинематической связью,
- подключение выхода приемника светового излучения ко входу ПЭВМ.
Кроме того, установление на перекладине первого портала ведомых роликов, размещенных по разные стороны от ведущего ролика и взаимодействующих с гибкой кинематической связью.
Наличие указанных отличительных признаков обеспечивает соответствие заявляемого устройства условию патентоспособности «новизна» по действующему законодательству.
Проверка условия патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня авторами проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличными от выбранного прототипа признаками, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного авторами.
Другими словами, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях оптоэлектронной контрольно-измерительной техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое техническое решение от прототипа.
Это позволяет сделать вывод о соответствии заявляемого устройства условию патентоспособности «изобретательский уровень» по действующему законодательству.
Описание устройства в статике.
Сущность изобретения поясняется чертежами.
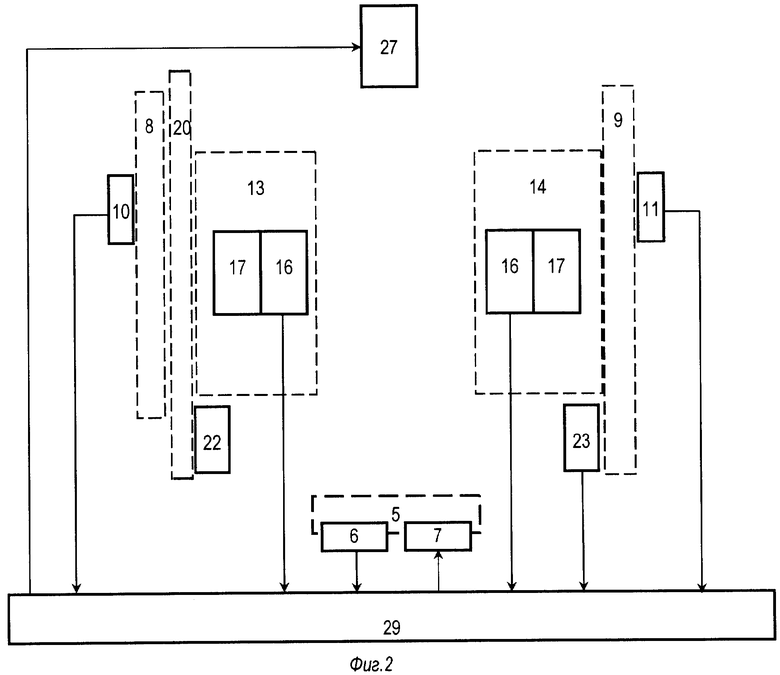
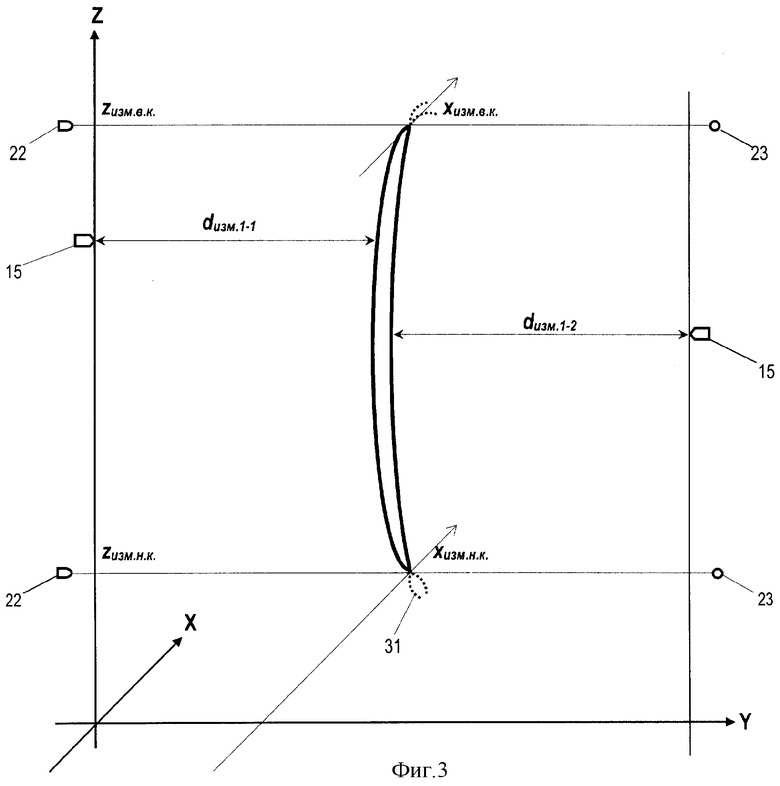
На фиг.1 приведена конструктивная схема устройства, на фиг.2 показаны электрические связи между отдельными блоками и элементами устройства, фиг.3 поясняет работу устройства.
Оптоэлектронное устройство контроля профиля пера лопатки содержит массивное неподвижное горизонтальное основание 1, вертикальные стойки 2 и 3, размещенные на основании 1 по разные стороны от контролируемой лопатки 4, первую каретку 5, размещенную на неподвижном горизонтальном основании 1 с возможностью перемещения между вертикальными стойками 2 и 3 параллельно оси «X» системы координат устройства и снабженную первым датчиком 6 линейных перемещений и первым приводом 7, вторую 8 и третью 9 каретки, размещенные соответственно на вертикальных стойках 2 и 3 с возможностью перемещения параллельно оси «Z» системы координат устройства и снабженные соответственно вторым 10 и третьим 11 датчиками линейных перемещений, оснастку 12 для установки лопатки, размещенную на первой каретке 5 и выполненную с возможностью обеспечения жесткого позиционирования пера лопатки 4 в вертикальной плоскости, первую 13 и вторую 14 оптоэлектронные головки, размещенные соответственно на второй 8 и третьей 9 каретках и образованные каждая из источника 15 узкого светового луча, например лазера, многоэлементного фотоприемника 16, снабженного блоком 17 развертки и формирования кода (фиг.2), и объектива 18, причем объективы 18 оптоэлектронных головок 13 и 14 установлены с возможностью обеспечения триангуляционной оптической связи фотоприемников 16 с источниками 15 через соответствующую поверхность пера контролируемой лопатки 4, перекладину 19, соединяющую вертикальные стойки 2 и 3 и образующую вместе с ними первый портал, второй портал, вертикальные стойки 20 и 21 которого размещены по разные стороны от контролируемой лопатки 4, причем одна из стоек 20 второго портала закреплена на второй каретке 8, оптически сопряженные источник 22 и приемник 23 светового излучения, закрепленные на разных вертикальных стойках 20 и 21 второго портала и снабженные соответствующими объективами 24 и 25, гибкую кинематическую связь 26, выполненную, например, в виде зубчатого ремня и соединяющую вторую 8 и третью 9 каретки, второй привод 27, размещенный на перекладине 19 первого портала и снабженный ведущим роликом 28, взаимодействующим с гибкой кинематической связью 26 и персональную электронную вычислительную машину (ПЭВМ) 29 (фиг.2), входы которого подключены к выходам датчиков линейных перемещений 6, 10, 11, многоэлементных фотоприемников 16 оптоэлектронных головок 13 и 14 и приемника 23 светового излучения, а выходы соединены с приводами 7 и 27 устройства.
Кроме того, на перекладине 19 первого портала могут быть установлены ведомые ролики 30, размещенные по разные стороны от ведущего ролика 28 и взаимодействующие с гибкой кинематической связью 26. Количество и расположение ведомых роликов 30 на перекладине 19 определяется конструктивными особенностями конкретного устройства контроля профиля лопаток.
Фотоприемники 16 могут быть реализованы, например, на основе выпускаемых промышленностью МДП-фотодиодных матриц (линеек). При этом блок 17 развертки и формирования кода предназначен для формирования тактовых импульсов считывания, поступающих на указанные фотодидные матрицы (линейки), выделения видеосигнала и формирования соответствующих кодов. Последние известны и их конкретные схемы описаны в литературе [5-9].
Падающие на лопатку 4 лучи источников 15 лежат в одной вертикальной плоскости, перпендикулярной оси Х системы координат устройства (фиг.1а, 3). Луч источника 22 параллелен указанной плоскости. Расстояния ΔХ и ΔZ между лучами источников 15 и 22 (фиг.1) жестко заданы, конструктивно выполнены минимальными и учитываются при измерениях.
Назначение и функции элементов устройства.
Основание 1 предназначено для размещения и крепления на нем вертикальных стоек 2 и 3, а также установки каретки 5.
Вертикальные стойки 2 и 3 предназначены для размещения на них кареток 8 и 9 и перекладины 19.
Перекладина 19 предназначена для размещения на ней привода 27 с роликом 28 и роликов 30 с гибкой связью 26.
Привод 7 предназначен для перемещения каретки 5 с оснасткой 12 и контролируемой лопаткой 4 параллельно координатной оси «X» системы координат устройства.
Привод 27 предназначен для перемещения кареток 8 и 9 параллельно координатной оси «Z» системы координат устройства.
Датчики 6, 10 и 11 линейных перемещений предназначены для формирования сигналов о координатах положения соответственно кареток 5, 8 и 9.
Оптоэлектронные головки 13 и 14 предназначены для измерения дальности до точек поверхности пера лопатки 4 путем реализации триангуляционного оптического метода считывания информации. При этом источники 15 с объективами 18 предназначены для формирования узкого светового луча в направлении поверхности пера лопатки 4, а фотоприемники 16 совместно с блоком 17 - для формирования сигнала о положении отраженного светового пятна на их поверхности.
Источник 22 и приемник 23 светового излучения с соответствующими объективами 24 и 25 предназначены для реализации теневого оптического метода измерений и фиксации координат точек кромки пера лопатки 4.
ПЭВМ 29 предназначен для реализации программы контроля пера лопатки 4 и координации работы всех элементов и блоков устройства,
Принцип работы устройства основан на совмещении триангуляционного и теневого оптических методов измерений.
Описание устройства в динамике.
Перо контролируемой лопатки 4 представляется в виде множества л контуров его сечений вертикальными плоскостями, параллельными плоскости «YOZ» устройства. Для этого пред началом измерений на основе чертежей и другой конструкторской документации строится математический «образ» пера эталонной («идеальной») лопатки 4 в виде координат (хэm, уэm, zэm) точек контуров его сечений, информация о которых вводится в память ПЭВМ 29.
Также в память ПЭВМ 29 вводятся программа контроля (измерений) и необходимые исходные данные, в том числе допуски на геометрические параметры лопатки 4.
Программа контроля основана на сопоставлении эталонных значений координат (хэm, уэm, zэm) точек контуров сечений пера лопатки 4 с измеренными значениями координат (xизм, yизм, zизм) данных точек.
С помощью оснастки 12 производится позиционирование (ориентация) измеряемой (контролируемой) лопатки 4 в вертикальной плоскости. По управляющему сигналу с выхода ПЭВМ 29 включается привод 7, который перемещает каретку 5, а вместе с ней и оснастку 12 с контролируемой лопаткой 4 вдоль координаты «X» устройства (перпендикулярно чертежу на фиг.1а) до заданной программой измерений координаты xизм1. При этом положение каретки 5 контролируется датчиком 6 линейных перемещений.
После этого по управляющему сигналу с выхода ПЭВМ 29 включается привод 27, вращающий ведущий ролик 28, взаимодействующий с гибкой связью 26. В результате вращение ролика 28 преобразуется во встречно-поступательное и относительно медленное перемещение кареток 8 и 9, а равно и оптоэлектронных головок 13 и 14 вдоль оси координат «Z» устройства.
Дальнейшая работа устройства основана на измерении дальности dизм до поверхности пера лопатки 4 путем реализации метода оптической триангуляции. Световые лучи источников 15 обеих оптоэлектронных головок 13 и 14 попадают на противоположные участки контура сечения пера лопатки 4. При этом рассеянное (диффузное) излучение данных источников 15 с поверхностей пера фокусируются объективами 18 на соответствующие фотолинейки 16 в виде световых марок.
Одновременно на одну из поверхностей пера лопатки 4 попадает луч света с источника 22. Однако он не достигает приемника 23, так как перекрыт пером лопатки 4. При этом, так как ΔХ и ΔZ не равны нулю, луч света источника 22 «перемещается» по поверхности пера по «своему» контуру, что учитывается в дальнейшем при обработке полученных данных.
Соответствующие блоки 17 формируют тактовые импульсы, обеспечивающие оптоэлектронное преобразование изображений световых марок на фотолинейках 16. Указанное преобразование осуществляется таким образом, что изменения координат указанных световых марок на фотолинейках 16 пропорциональны изменениям профиля пера лопатки 4. Изображения световых марок вызывают изменения уровней напряжений в отдельных ячейках фотолинеек 16, вследствие чего распределение выходных сигналов фотодиодных ячеек во времени при считывании пропорциональны пространственному распределению интенсивности света по сечениям световых марок на фотоприемных линейках 16.
Информационные сигналы о дальности dизм1-1 и dизм1-2 (см. фиг.3) до точек пера лопатки 4 (фактически представляющие собой соответственно координаты уизм1-1 и уизм1-2) с выходов фотолинеек 16 поступают на входы ПЭВМ 29. Одновременно в память ПЭВМ 29 с датчиков 6, 10 и 11 линейных перемещений заносятся соответствующие им коды значений координат xизм1 zизм1-1 и xизм1, zизм1-2 точек контура сечения пера лопатки 4 (координаты xизм1 у них одинаковы).
Такие измерения дальности dизм до точек контура первого сечения пера, а также определение соответствующих им кодов значений координат xизм, zизм производятся по всему контуру.
Одновременно в процессе таких измерений по сигналу с приемника 23, который формируется в момент попадания на него луча источника 15, в ПЭВМ 29 фиксируются значения координат xизм.н.к., zизм.н.к. точки нижней кромки пера, получаемых в виде сигналов с датчиков 6, 10 и 11. Аналогичным образом фиксируются значения координат xизм.в.к., zизм.в.к. точки верхней кромки пера (фиг.3).
По завершении измерений для всех точек контура первого сечения привод 27 останавливается.
В следующий момент по сигналу с соответствующего выхода ПЭВМ 29 вновь включается привод 7, перемещающий каретку 5, а вместе с ней и оснастку 12 с контролируемой лопаткой 4 вдоль оси координат «X» устройства до заданной программой измерений координаты Хизм2.
После этого по управляющему сигналу с выхода ПЭВМ 28 вновь включается привод 27, вращающий ведущий ролик 28, взаимодействующий с гибкой связью 26. Вращение ролика 28 преобразуется в перемещение кареток 8 и 9, а следовательно, и оптоэлектронных головок 13 и 14 вдоль оси координат «Z» устройства. Оптоэлектронные головки 13 и 14 осуществляют измерение дальности dизм. (координаты уизм.) до поверхности пера лопатки 4. Информационные сигналы, соответствующие уизм2-1 и уизм1-2, с выходов оптоэлектронных головок вновь записываются в память ПЭВМ 29.
Одновременно в память ПЭВМ 29 с датчиков 6, 10 и 11 линейных перемещений заносятся соответствующие им коды значений координат xизм2, zизм2-1 и zизм2-2 точек контура сечения пера лопатки 4.
Такие измерения дальности dизм до точек контура второго сечения пера осуществляются по всему контуру.
По сигналу с приемника 23, который формируется в момент попадания на него луча источника 15, в ПЭВМ 29 вновь фиксируются значения координат xизм.н.к., zизм.н.к., xизм.в.к., zизм.в.к. новых точек нижней и верхней кромок пера.
Аналогично описанному выше измеряются координаты точек контуров всех n сечений пера лопатки 4.
В дальнейшем в ПЭВМ 29 производится программная обработка полученных данных, которая основана на следующем.
Контур сечения пера лопатки 4 характеризуется той особенностью, что он в районе кромки пера резко меняет радиус кривизны, в результате чего отраженные от нее лучи источников 15 искажаются. В итоге в ПЭВМ 29 формируются ложные участки («хвосты») 31 контура сечения пера (фиг.3), что приводит к грубым ошибкам измерений и снижает достоверность результатов контроля.
Чтобы исключить эти ошибки производится следующее. Полученные значения координат xизм.н.к., zизм.н.к. и xизм.в.к., zизм.в.к. для каждого контура принимаются за его «граничные» значения и в дальнейшем используются для программного «отсечения» его ложных участков 31. Для этого все точки, значения координат которых «меньше», чем xизм.н.к., zизм.н.к. и «больше», чем xизм.в.к., zизм.в.к., исключаются из совокупности полученных данных в процессе измерений.
Результаты всех измерений накапливаются в памяти ПЭВМ 29. При этом скорость измерения координат точек в устройстве намного превышает скорость перемещения кареток 8 и 9. В итоге в памяти ПЭВМ 29 формируется относительно большое число значений координат точек (так называемое «облако» результатов измерений). Программным путем производится их усреднение и далее сопоставление с эталонными значениями координат. Если результаты сопоставления не выходят за пределы допусков, лопатка 4 считается находящейся в допуске, если нет - лопатка отбраковывается.
Таким образом, предложенная совокупность существенных признаков устройства позволяет отсечь ложные участки контура сечений пера лопатки, формируемые в процессе измерений, существенно повысить тем самым точность измерений и достоверность результатов контроля. Кроме того, в устройстве достигнуто уменьшение количества приводов, необходимых для его функционирования.
Проверка условия патентоспособности «промышленная применимость».
Предлагаемое оптоэлектронное устройство контроля профиля пера лопатки не вызывает затруднений при изготовлении и может быть промышленно освоено. Опытный образец устройства испытан заявителем в течение месяца в эксплуатации.
Вышеизложенные сведения свидетельствуют для заявленного устройства, как оно охарактеризовано в формуле изобретения, о возможности реализации его с помощью известных и предложенных методов и средств. Следовательно, заявленное изобретение соответствует условию патентоспособности «промышленная применимость» по действующему законодательству.
Источники информации
1. Патент РФ №2117240 на изобретение «Устройство для контроля размеров изделий с продольной осью симметрии». Публ. 10.08.1998 г.
2. Свидетельство РФ №4601 на полезную модель «Оптоэлектронная система измерения пера лопаток и оснастка для установки лопаток при измерениях». Публ. 16.07.1997 г.
3. Патент РФ №2176071 на изобретение «Устройство для контроля геометрических параметров лопаток лопаточной решетки машины». Публ. 20.11.2001 г.
4. Патент РФ №2243503 на изобретение «Способ измерения геометрических параметров поверхностей сложнопрофилированных объектов и устройство для его осуществления». Публ.27.12.2004 г.
5. Патент РФ №2254555 на изобретение «Оптоэлектронное устройство контроля геометрических параметров лопаток». Публ. 20.06.2005 г. (прототип).
6. Системы технического зрения: Справочник / В.И.Сырямкин, В.С.Титов, Ю.Г.Якушенков, Р.М.Галиулин и др. // Под общ. ред. В.И.Сырямкина, В.С.Титова. - Томск: МГП «РАСКО», 1962, с.249-253,
7. Госьков П.И., Титов B.C. Оптоэлектронные развертывающие полупроводниковые преобразователи. Томск: ТПИ, 1980. - 94 с.
8. Кругликов С.В., Наймарк С.И. Интегральные МДП-фотодиодные устройства и их применение. Часть I. Интегральные МДП-фотодиодные элементы, линейки и матрицы. - Обзор по электронной технике, сер.3 - «Микроэлектроника», вып.2 (743). - М.: ЦНИИ «Электроника», 1980.
9. Авт.св. СССР №1647249. Фотоэлектрическое устройство для измерения профиля и толщины изделий сложной формы. Публ. 07.05.1991 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ ЛИСТОВОГО ПРОКАТА | 2010 |
|
RU2458318C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ С ВНУТРЕННЕЙ РЕЗЬБОЙ | 2007 |
|
RU2357204C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК | 2003 |
|
RU2254555C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377494C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ РЕЗЬБЫ ТРУБНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2342632C2 |
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
Оптоэлектронное устройство контроля профиля пера лопатки содержит неподвижное горизонтальное основание, две вертикальные стойки, размещенные на основании по разные стороны от контролируемой лопатки, первую каретку, размещенную на неподвижном горизонтальном основании с возможностью перемещения между вертикальными стойками параллельно оси «X» и снабженную первым датчиком линейных перемещений и первым приводом. Также вторую и третью каретки, размещенные на вертикальных стойках с возможностью перемещения параллельно оси «Z» и снабженные соответственно вторым и третьим датчиками линейных перемещений, оснастку для установки лопатки, размещенную на первой каретке, которая обеспечивает жесткое позиционирование пера лопатки в вертикальной плоскости. Первая и вторая оптоэлектронные головки, размещенные на второй и третьей каретках и образованные каждая из источника узкого светового луча, многоэлементного фотоприемника, снабженного блоком развертки и формирования кода, и объектива. Объективы оптоэлектронных головок установлены с возможностью обеспечения триангуляционной оптической связи фотоприемников с источниками узкого светового луча через соответствующую поверхность пера контролируемой лопатки. Также содержит второй привод и ПЭВМ, входы которой подключены к выходам датчиков линейных перемещений и многоэлементных фотоприемников, а выходы соединены с приводами устройства, перекладину, соединяющую вертикальные стойки и образующую вместе с ними первый портал, второй портал, вертикальные стойки которого размещены по разные стороны от контролируемой лопатки. Одна из стоек второго портала закреплена на второй каретке. Оптически сопряженные источник и приемник светового излучения снабжены соответствующими объективами и закреплены на разных вертикальных стойках второго портала. Гибкая кинематическая связь соединяет вторую и третью каретки. Второй привод размещен на перекладине первого портала и снабжен ведущим роликом, взаимодействующим с гибкой кинематической связью, а выход приемника светового излучения подключен ко входу ПЭВМ. Технический результат - повышение достоверности результатов контроля пера лопатки путем усечения (исключения) формируемых в памяти ПЭВМ ложных участков контура пера, а также снижение количества приводов в устройстве. 1 з.п. ф-лы, 3 ил.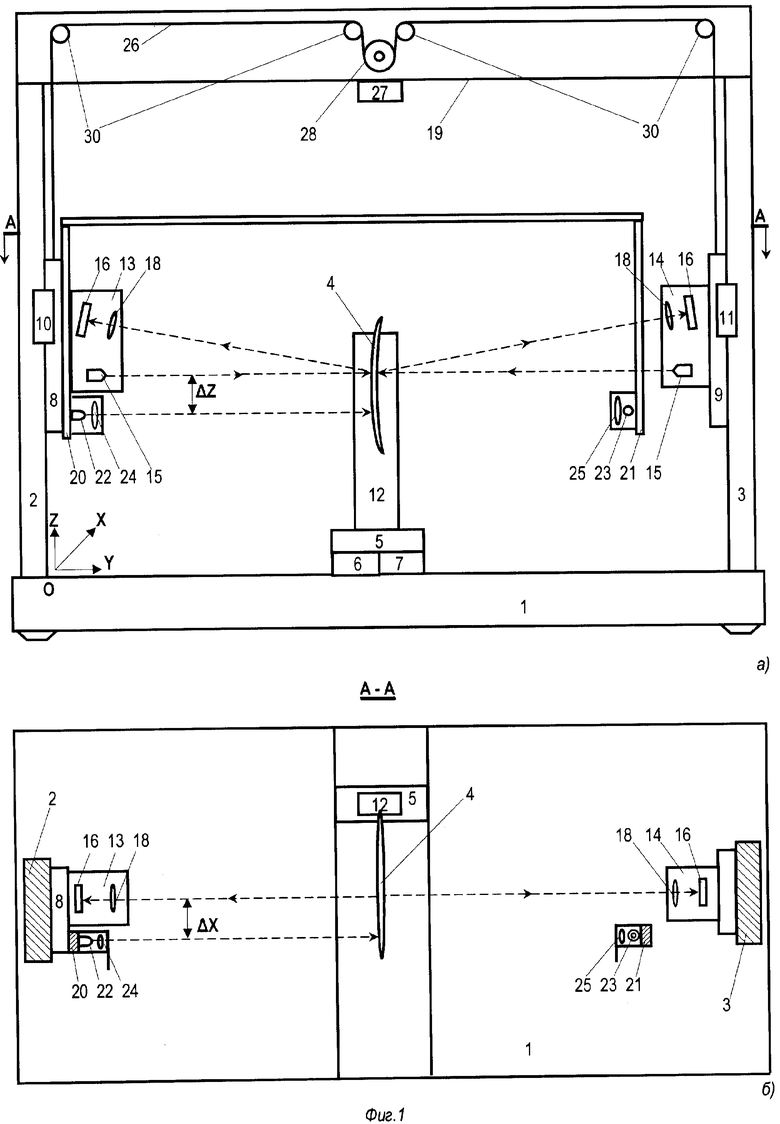
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК | 2003 |
|
RU2254555C2 |
| Способ очищения креозота | 1923 |
|
SU2144A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| Устройство для автоматического измерения температуры хлеба в процессе выпечки | 1977 |
|
SU737794A1 |
| WO 9940390 A, 12.08.1999. | |||

