ел
со со 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ИЗМЕНЕНИЯ НАГРУЗКИ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 1971 |
|
SU310140A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Устройство контроля системы управления источником сейсмических волн | 1983 |
|
SU1141361A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Устройство коррекции мерной длины заготовки | 1987 |
|
SU1438915A1 |
| Устройство для автоматического измерения производительности топливовпрыскивающего насоса дизеля | 1983 |
|
SU1133432A1 |
| Устройство для управления станком | 1981 |
|
SU970322A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
Изобретение относится к определению физико-механических свойств грунтов, в частности для определения деформационных характеристик грунтов при инженерно-геологических изысканиях, и позволяет повысить точность определения свойств грунтов. Устройство содержит датчик 2 деформации, блок 3 регистрации, нагрузочный механизм 4 с электроприводом, логическую схему 6 с задатчиком 7 приложения нагрузки, дешифратор 8, счетчик 9, задатчик 10 режима разгрузки, таймер 11 с задатчиком 12 выдержки нагрузки и с задатчиком 13 режима нагружения и блок 14 управления. 8 ил.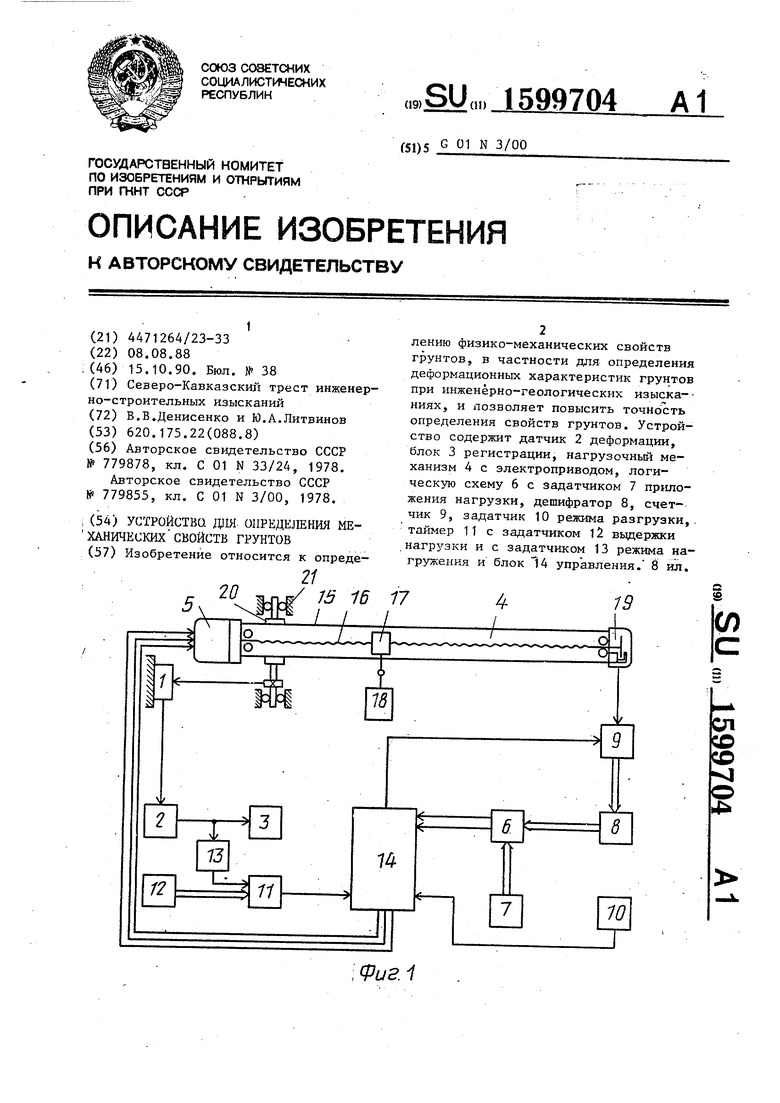
, Фиг. 1
Изобретение относится к определению физико-механических свойств грунтов, в частности к определению деформационных характеристик грунтов при инжен9.рно-геологических изысканиях.
Целью изобретения является повышение точности определения свойств грунтов.
На фиг.1 представлено предлагаемое устройство для определения механических свойств грунтов; на фиг. 2 - датчик величины нагрузки; на фиг.З - функциональная схема блока регистра- ции; на фиг.4 - логическая схе;ма; на фиг.З - задатчик приложения на- грузки; на фиг.6 - задатчик режима разгрузки; на фиг. 7 - таймер; на фиг.8 - блок управления.
Устройство содержит рабочую камеру (одометр) 1 с датчиком 2 дефорации, блок 3 регистрации, нагрузочный механизм 4 с электроприводом 5, логическую схему 6 с задатчиком 7 приложения нагрузки, дешифратор 8, счетчик 9, задатчик 10 режима разгрузки, таймер 1 Г с аадатчиком 12 выдержки нагрузки и задатчиком 13 режима на- гружения и блок 14 управления.
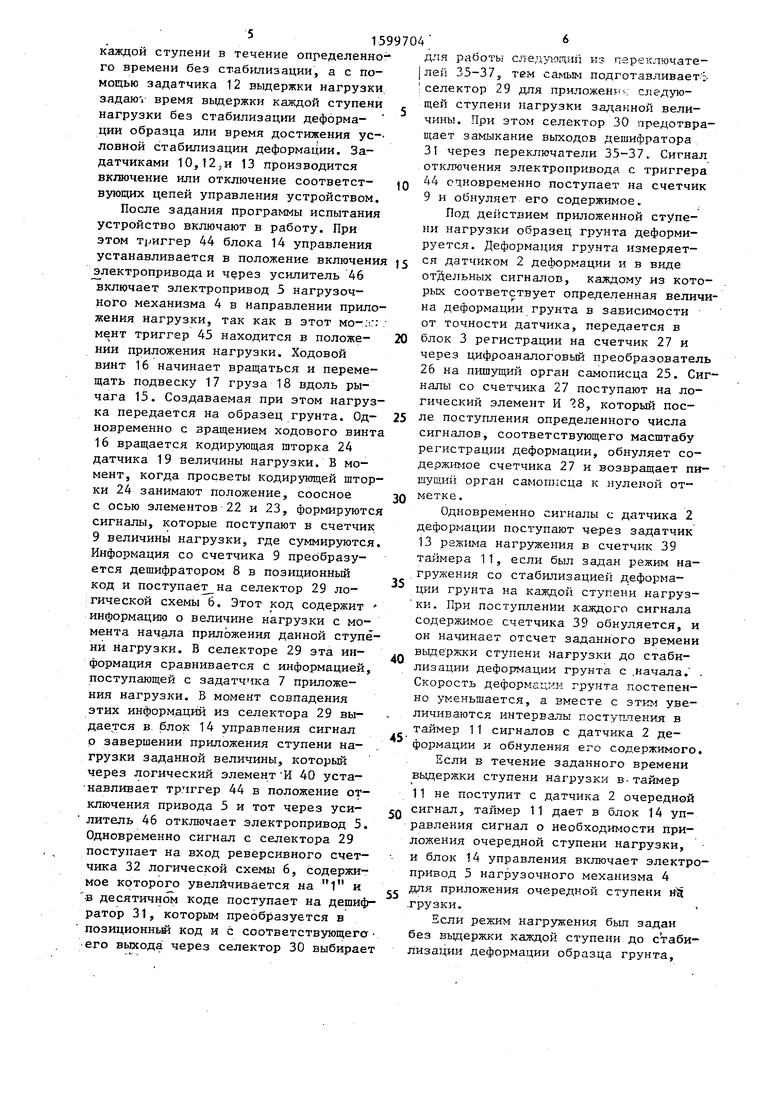
Нагрузочный механизм 4 состоит из рычага 15 с ходовым винтом 16, соединенным с электроприводом 5 и модействующим с подвеской 17 груза 18 постоянной Мс1ссы, и: датчика 19 величины нагрузки. С помощью оси- держателя 20 нагрузочный механизм 4 арнирно закреплен на столе-основании 21 .
Датчик 19 величины нагрузки выполнен в виде преобразователя перемещения в код, состоящ€;го из излучателя 22 и приемного 23 элементов, закрепленных на рычаге 15, и кодирующей шторки 24, закрепленной-на ходовом винте 16. Кодирующая шторка 24 выполнена в виде непрозрачного диска со сквозными отверстиями. Шторка размещена между элементч.ми 22 и 23. Число отверстий шторки согласовывается с шагом ходового винта так, чтобы расстояние между соседними отверстиями соответствовало минимальному интервалу перемещения подвески 17 с грузом 18 (минимальной ступени нагрузки) .
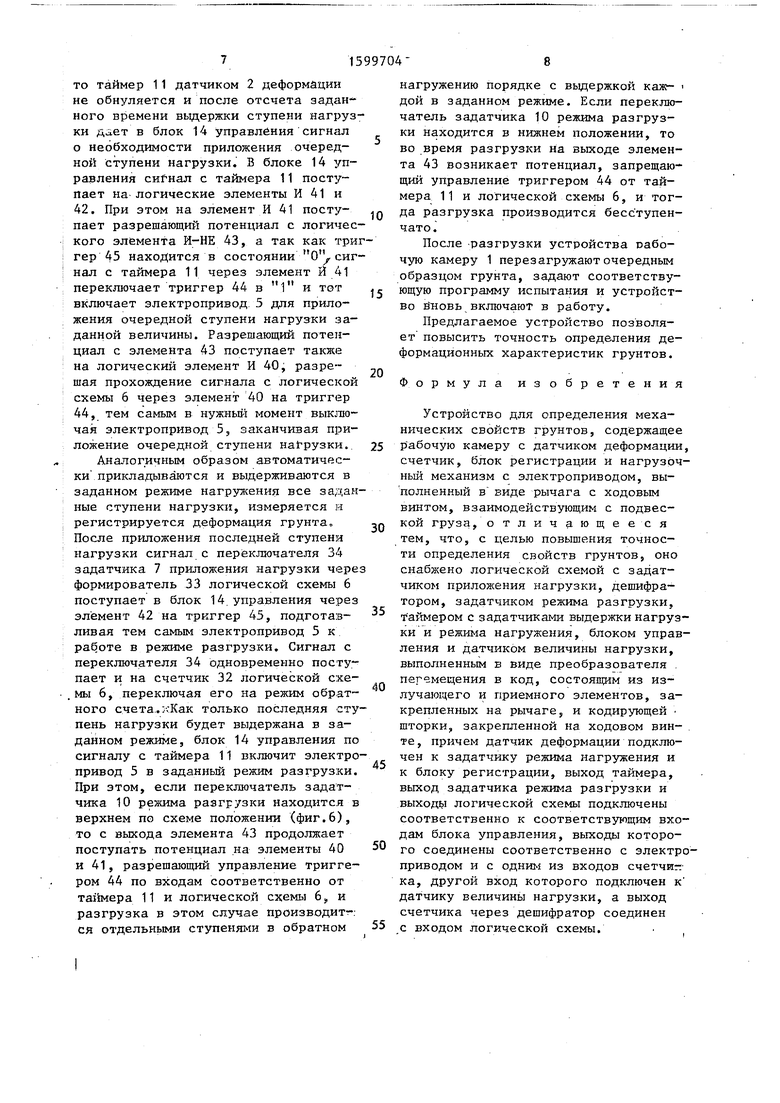
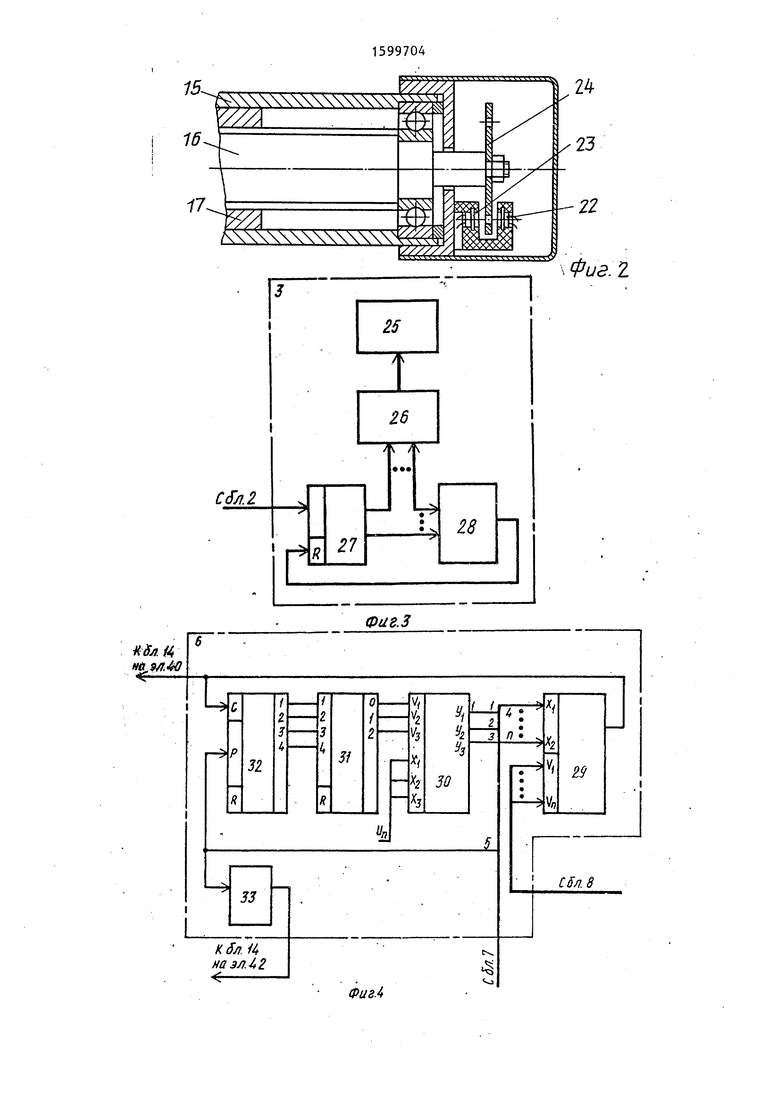
Датчик 2деформации может быть выполнен в виде фотоэлектронного (растрового) преобразователя. Блок 3 регистрации содержит самописец 25,
0
5
0
5
0
5
0
5
0
5
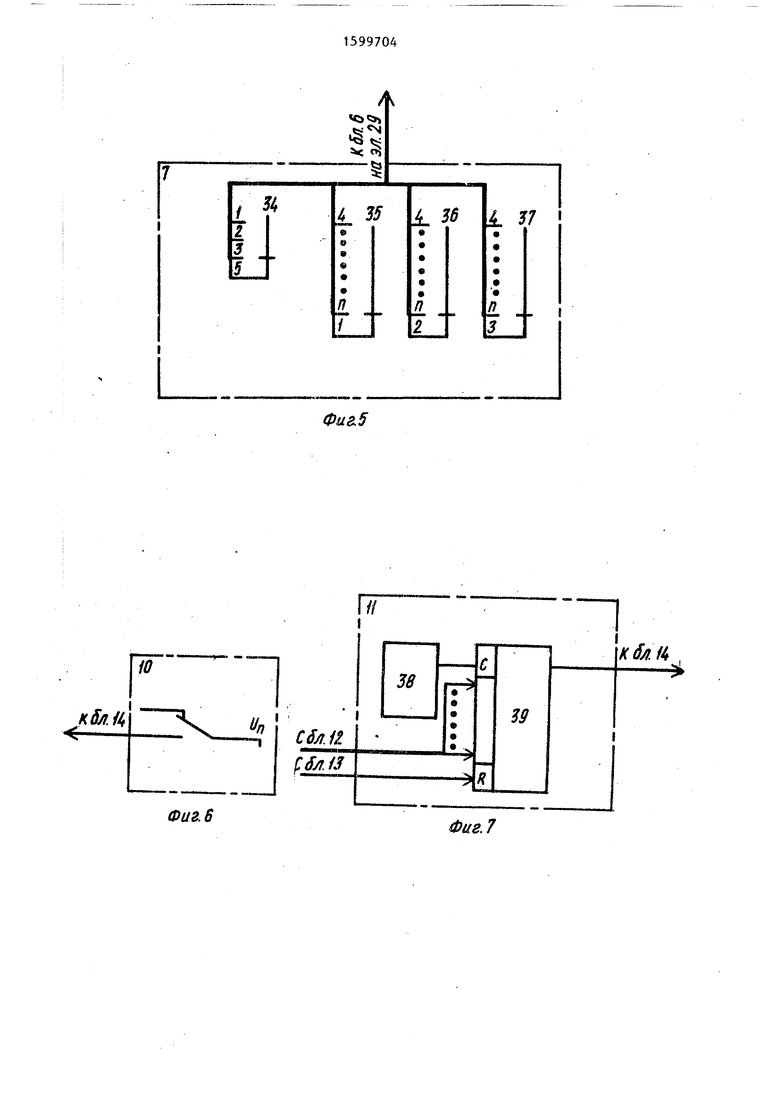
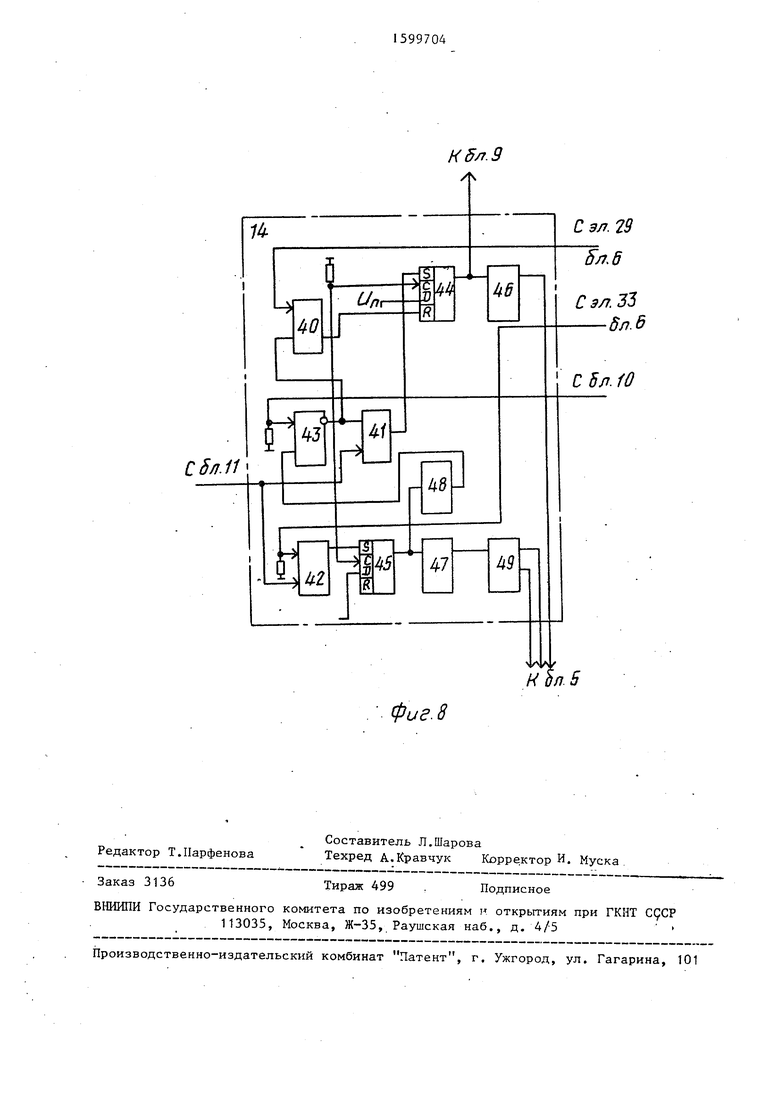
цифроаналоговый преобразователь 26, счетчик 27 и логический элемент И 28, Логическая схема 6 содержит селекторы 29 и 30, дешифратор 31, реверсивный счетчик 32 и формирователь 33. Задатчик 7 приложения нагрузки выполнен в виде нескольких многопозиционных переключателей: для задания количества ступеней нагрузки - переключатель 34, для: задания величины ступеней нагрузки - переключатели 35-37. Задатчик 10 режима разгрузки выполнен в виде двухпозиционного переключателя. Таймер 11 содержит генератор 38 непрерывной последовательности импульсов и счетчик 39 с переменным коэффициентом деления, задаваемым задачиком 12 вьщержки нагрузки, Задатчик 12 вьщержки нагрузки выполнен в виде многопозиционного переключателя. Задатчик 13 режима нагружения выполнен в виде двухпозиционного переключателя . Блок 4 управления содержит логические элементы И 40-42, логический элемент И-НЕ 43j триггера 44 и 45, усилители 46 и 47, элемент 48 задержки и блок 49 включения.
Устройство работает следующим образом.
Испытываемый образец грунта загружают в рабочую камеру (одометр) 1, которую устанавливают на стол-основа - кие 1, и подводят к ней нагрузочный механизм 4 и датчик 2 деформации. .С помощью переключателей 34-37 и за- датчика 7 приложения нагрузки задают необходимую программу приложения ступеней нагрузки. Переключателем 34 чадают число ступеней нагрузки, а переключателями 35-37 - величину этих ступеней. При этом может быть , задана любая программа приложения ступеней нагрузки с любым числом ступеней, с равномерным или неравномерным шагом по величине. В качестве первой или последней ступени нагрузки мо-- жет быть задана любая по величине нагрз зкя от нулевого до конечного значения. Переключателями 35-37 открывается соответствующий канал селектора 29 логической схемы 6. С помощью задатчика 10 режима разгрузки задают режим разгрузки - ступенча- TbDi: или бесступенчатый, с помощью задатчика 13 режима нагружения задают режим нагружения - со стабилизацией деформации образца грунта на каждой ступени нагрузки с вьщержкой
5
10
20
25
каждой ступени в течение определенного времени без стабилизации, а с помощью задатчика 12 выдержки нагрузки задаю время выдержки каждой ступени нагрузки без стабилизации деформа- ции образца или время достижения ус-, ловной стабилизации деформации, За- датчиками 10,12,и 13 производится включение или отключение соответствующих цепей управления устройством. После задания программы испытания устройство включают в работу. При этом триггер 44 блока 14 управления устанавливается в положение включения J5 электропривода и через усилитель 46 включает электропривод 3 нагрузочного механизма 4 в направлении приложения нагрузки, так как в этот мо-;::: . мент триггер 45 находится в положении приложения нагрузки. Ходовой винт 16 начинает вращаться и перемещать подвеску 17 груза 18 вдоль рычага 15. Создаваемая при этом нагрузка передается на образец грунта. Одновременно с вращением ходового винта 16 вращается кодирующая шторка 24 датчика 19 величины нагрузки. В момент, когда просветы кодирующей шторки 24 занимают положение, соосное с осью элементов 22 и 23, формируются сигналы, которые поступают в счетчик: 9 величины нагрузки, где суммируются. Информация со счетчика 9 преобразуется дешифратором 8 в позиционный код и поступаёт на селектор 29 логической схемы 6. Этот код содержит информацию о величине нагрузки с момента начала приложения данной ступени нагрузки. В селекторе 29 эта информация сравнивается с информацией, поступающей с задатччка 7 приложения нагрузки. В момент совпадения этих информ.ации из селектора 29 выдается в блок 14 управления сигнал о завершении приложения ступени нагрузки заданной величины, который через логический элемент И 40 уста- навливает триггер 44 в положение отключения привода 5 и тот через усиитель 46 отключает электропривод 5. Одновременно сигнал с селектора 29 оступает на вход реверсивного счетика 32 логической схемы 6, содержиое которого увеличивается на 1 и десятичном коде поступает на дешифатор 31, которым преобразуется в озиционньй код и с соответствующего го вькода через селектор 30 выбирает
30
35
40
45
50
55
9704
J5
10
20
25
J5
30
35
40
45
50
5
для работы следующи из переклгочате- I лей 35-37, тем самым подготавливает -- селектор 29 для пpилoжeн iv,: следующей ступени нагрузки заданной величины. При этом селектор 30 предотвращает замыкание выходов дешифратора 31 через переключатели 35-37. Сигнал отключения электропривода с триггера 44 одновременно поступает на счетчик 9 и обнуляет его содержимое.
Под действием приложенной ступени нагрузки образец грунта деформируется. Деформация грунта измеряется датчиком 2 деформации и в виде отдельных сигналов, каждому из которых соответствует определенная величина деформации грунта в зависимости от точности датчика, передается в блок 3 регистрации на счетчик 27 и через цифроаналоговый преобразователь 26 на пишущий орган самописца 25. Сигналы со счетчика 27 поступают на логический элемент И 8, который после поступления определенного числа сигналов, соответствующего масштабу регистрации деформации, обнуляет со- держшгае счетчика 27 и возвращает пишущий орган самописца к нулевой отметке.
Одновременно сигналы с датчика 2 деформации поступают через задатчик 13 режима нагрзгжения в счетчик 39 таймера 11, если был задан режим на- гружения со стабилизацией деформации грунта на каждой ступени нагруз- ки. При поступлении каждого сигнала содержимое счетчика 39 обнуляется, и он начинает отсчет заданного времени вьще ржки ступени нагрузки до стабилизации деформации грунта с .начала. Скорость деформации грунта постепенно уменьшается, а вместе с этим увеличиваются интервалы поступления в таймер 11 сигналов с датчика 2 деформации и обнуления его содержимого.
Если в течение заданного времени выдержки ступени нагрузки в-таймер 11 не поступит с датчика 2 очередной сигнал, таймер 11 дает в блок 14 управления сигнал о необходимости приложения очередной ступени нагрузки, и блок 14 управления включает электропривод 5 нагрузочного механизма 4 для приложения очередной ступени ifS .грузки.
Если режим нагружения был задан без вьщержки каждой ступени до стабилизации деформации образца грунта.
„
то таймер 11 датчиком 2 деформации не обнуляется и после отсчета заданного времени выдержки ступени нагрузки дает в блок 14 управления сигнал о необходимости приложения очередной ступени нагрузки. В блоке 14 управления cnfнал с таймера 11 поступает на логические элементы И 41 и 42. При этом на элемент И 41 поступает разрешающий потенциал с логического элемента И-НЕ 43, а так как тригер 45 находится в состоянии 0. сигнал с таймера 11 через элемент И 41 переключает триггер 44 в 1 и тот включает электропривод 5 для приложения очередной ступени нагрузки заданной величины. Разрешающий потенциал с элемента 43 поступает также на логический элемент И 40, разре шая прохождение сигнала с логической схемы 6 через элемент 40 на триггер 44, тем самым в нужньш момент выключая электропривод 5, заканчивая приложение очередной ступени нагрузки. Аналогичным образом автоматически прикладываются и вьщерживаются в заданном режиме нагружения все заданные ступени нагрузки, измеряется и регистрируется деформация грунта. После приложения последней ступени нагрузки сигнал с переключателя 34 задатчика 7 приложения нагрузки чере формирователь 33 логической схемы 6 поступает в блок 14,управления через элемент 42 на триггер 45, подготавливая тем самым электропривод 5 к работе в режиме разгрузки. Сигнал с переключателя 34 одновременно поступает и на счетчик 32 логической схе- . мы 6, переключая его на режим обратного счета.. JvKaK только последняя ступень нагрузки будет выдержана в заданном режиме, блок 14 управления по сигналу с таймера 11 включит электропривод 5 в заданньй режим разгрузки. При этом, если переключатель задатчика 10 режима разгрузки находится в верхнем по схеме положении (фиг.6), то с выхода элемента 43 продолжает поступать потенциал на элементы 40 и 41, разрешающий управление триггером 44 по входам соответственно от TaiiMepa 11 и логической схемы 6, и разгрузка в этом случае производитг-: ся отдельными ступенями в обратном
20
25
нагружению порядке с вьщержкой каж- дои в заданном режиме. Если переключатель задатчика 10 режима разгруз- ки находится в нижнем положении, то во время разгрузки на выходе элемента 43 возникает потенциал, запрещающий управление триггером 44 от таймера 11 и логической схемы 6, и да разгрузка производится бесс тупен- чато.
После разгрузки устройства сабо- чую камеру 1 перезагружают очередным образцом грунта, задают соответству 5 ющую программу испытания и устройство в новь включают в работу.
Предлагаемое устройство позволяет повысить точность определения деформационных характеристик грунтов.
Формула изобретения
Устройство для определения механических свойств грунтов, содержащее рабочую камеру с датчиком деформации, счетчик, блок регистрации и нагрузочный механизм с электроприводом, вы- полненный в виде рычага с ходовым винтом, взаимодействующим с подвес2Q кой груза, о тлич ающе еся тем, что, с целью повышения точности определения свойств грунтов, оно снабжено логической схемой с задат- чиком приложения нагрузки, дешифратором, задатчиком режима разгрузки, т аймером с задатчиками выдержки нагрузки и режима нагружения, блоком управления и датчиком величины нагрузки, выпохшенным в виде преобразователя . перемещения в код, состоящим из излучающего и приемного элементов, закрепленных на рычаге, и кодирующей шторки, закрепленной на ходовом винте, причем датчик деформации подключен к задатчику режима нагружения и к блоку регистрации, выход таймера, выход задатчика режима разгрузки и выходу логической схемы подключены соответственно к соответствзт щим входам блока управления, выходы которого соединены соответственно с электроприводом и с одним из входов счетчи- ка, другой вход которого подключен к датчику величины нагрузки, а выход счетчика через дешифратор соединен
55 с входом логической схемы.
35
40
45
50
v
17
Фиг.з
Фие.5
Фие.7
Редактор Т.Парфенова
Составитель Л.Шарова
Техред А.Кравчук Корректор И. Муска
Заказ 3136
Тираж 499
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ 113035, Москва, Ж-35, Раушская наб., д. 4/5
Н5Л.9
НЬл 5
фиг. 8
Подписное
| Устройство для испытания грунта | 1978 |
|
SU779878A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения механических свойств грунта | 1978 |
|
SU779855A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
