Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватньм устройствам, .
Цель изобретения - обеспечение автоматического захвата и освобождения груза.
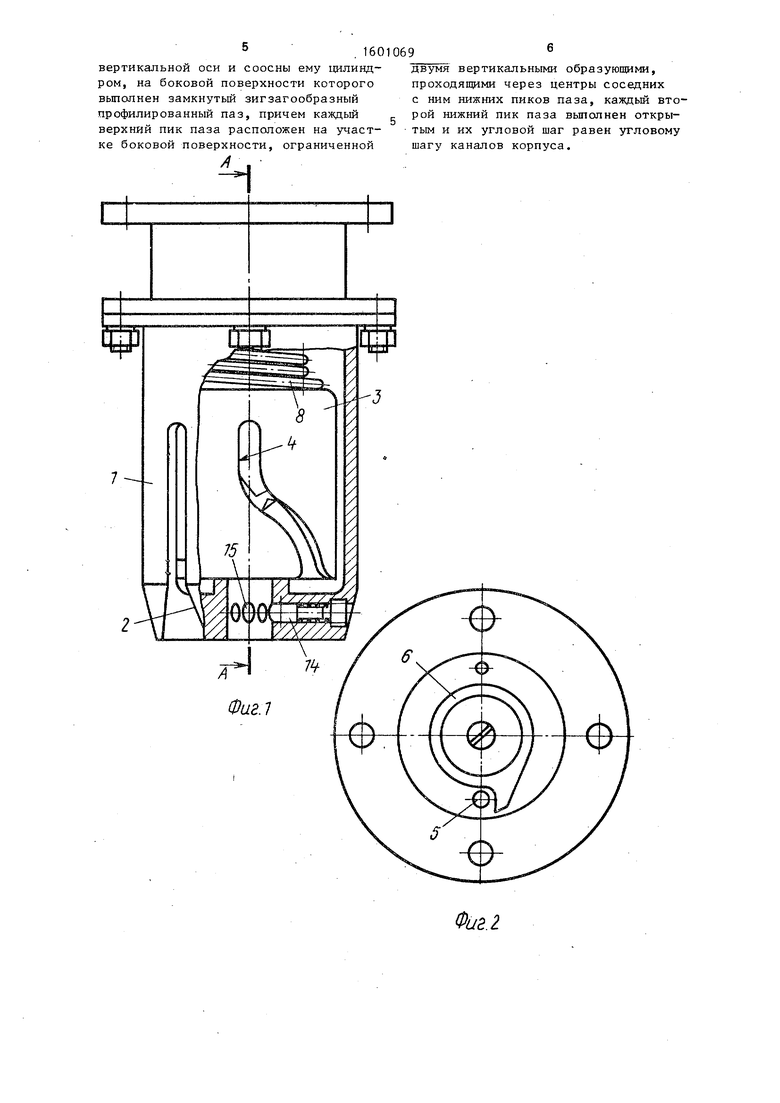
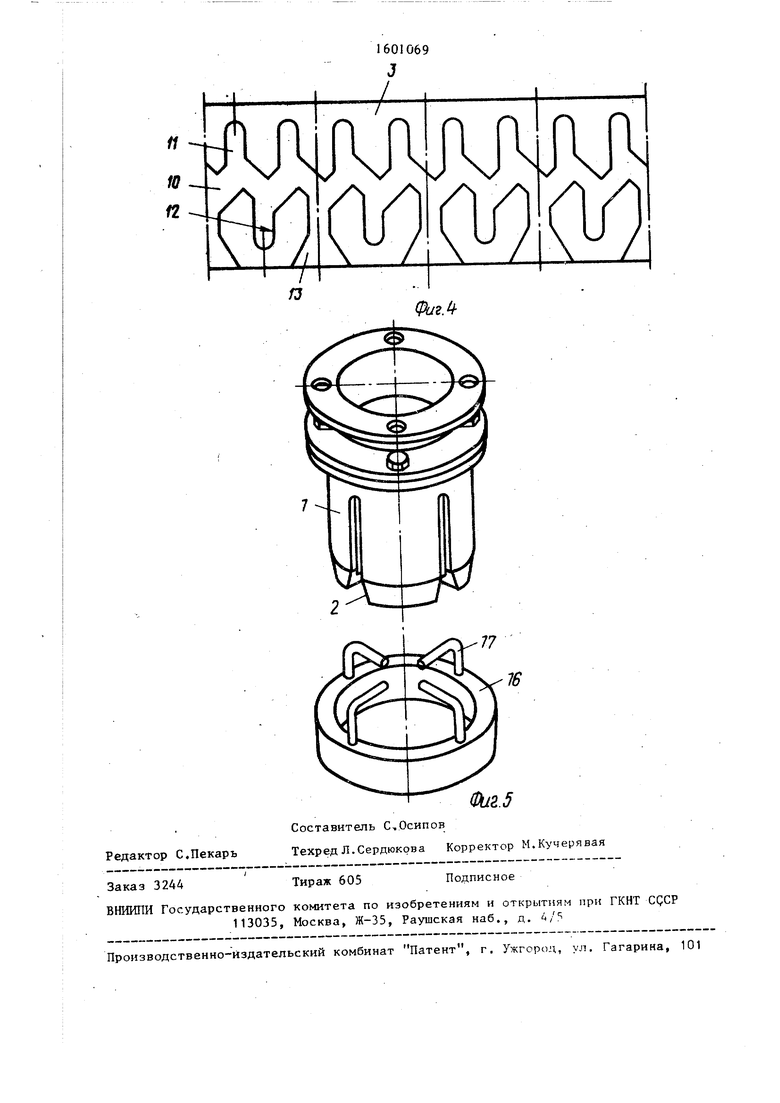
. На фиг.1 изображен захват, общий ВИД1 на .фиг.2 - то же, вид сверху; на фиГоЗ - разрез А-А на фиг.1; на иг,4 -- развертка боковой поверхности цилиндрической защепки; на фиг.5- устройство перед захватом груза.
Захват содержит корпус 1 с вертикальными сквозными каналами 2. Внутри корпуса 1 размещен цилиндр 3, на стенках которого вьпшлнены накэтонные каналы 4,. Цилиндр 3 имеет возможность ограниченного поворота относительно вертикальной оси захвата. Огра шчение поворота тдалиндра 3 достигается взаимодействием упора 5, ус- тановленнот о на корпусе 1 , и выступа шайбы 6, жестко закрепленной на цапфе 7 цилиндра 3, Прижатие выступа шайбы б к упору 5, а также возврат цилиндра 3 в исходное положение после его поворота обеспечивается пружиной 8, Во внутренней полости цилиндра 3 размещена с возможностью поворо- та относительно вертикальной оси цилиндрическая защелка 9, на боковой поверхности которой выполнен замкнутый зигзагообразный пр-офилированньй паз 10, причем каткдый из верхних пиков 1.1 паза 10 расположен на площадке боковой поверхности защелки 9, ограниченной двумя вертикальными образующими.боковой поверхности, про- ходящи1 1И через центры соседних с ним няжних пиков 12 и 13 паза 10 а каждый второй нижний пик 13 вьшолнен открытым снизу. Для фиксации цилиндрической защелки 9 в определенньш по..шшх на захвате установлен подпр- 7киненньш стопор 14, который взаимодействует с лунками 15, Шаги размеП(ения каналов 2 и 4, а также открытых снизу нижних пиков 13 паза 10, исчисленных в угловом выраженииj доллснг:: быть одинаковыми
Зацеплеш-Ес груз
ч А
о. wf 1
снабженного
горизонтальньа-ш стержняг-и 17j осу- Е1естш1яется следующим образом.
Захват при взаимной распохшжении цилиндра 3 и защелки 9 относит&аьно .корпуса 1 в исходном положении при котором совпадают каналы 2 я 4 и пик 13 паза 10, подводится к грузу 16
5
0
5
0
5
0
5
0
5
таким образом, чтобы стержни 17 вощ- ли в каналы 2 корпуса 1. При дальнейшем опускании захвата стержни 17 входят в каналы 4 и в паз 10, При этом происходит поворот цилиндра 3 и защелки 9 от воздействия стержней 17 на контактирующие с ними поверхности канала 4 и паза 10. По достижении стержнями 17 верхнего положения в пазу 10 опускание захвата прекращается. Защелка 9 зафиксирована при этом стопором 14. При последующем подъеме захвата стержни 17 размещаются в нижней точке пика 12 паза 10, что препятствует выходу стержней 17 из захвата, а цилиндр 3 под действием пружины 8 поворачивается на некоторый угол, определиемьш углом наклона каналов 4, В этом положении элементов захвата каналы 2 и 4 не совпадают, чем обеспечивается надежная и безопасная транспортировка груза 16.
По окончании транспортировки груза 16 при опускании захвата стержни 17 перемещаются в следующий верхний пик 11 паза 10, чем обеспечивается поворот защелки 9 до совпадения открытого участка паза 10 с входом в канал 2. При последующем поднятии захвата происходит, поворот и цилиндра 3 до совпадения входа в канал 4 с входом в канал 2, что позволяет беспрепятственно снять захват с груза. При этом все элементы захвата занимают исходное положение, т.е. захват готов к последующей работе.
Формула изобретения
Захват для грузов, содержащий корпус с вертикальными сквозными каналами, размещенный внутри корпуса соос- но ему с возможностью ограниченного поворота относитетьно вертикальной оси патый цилиндр с крьшкой на верхней его части и со сквозными каналами, выполненными с шагом, равным шагу каналов корпуса, и ограничитель угла поворота цилиндра, отличаЕО- щ и и с я тем, что, с целью повышения удобства и эксплуатации, каналы корпуса выполнены открытыми с расширением в нижней части, а каналы цилиндра открытыми снизу и наклонными, при этом захват снабжен размещенным внутри полого HiiJiHivlpa с возможностью фиксированного поворота относительно
. 1601069
вертикальной оси и соосны ему цилиндром, на боковой поверхности которого выполнен замкнутый зигзагообразный профилированный паз, причем каждый верхний пик паза расположен на участке боковой поверхности, ограниченной
/)
двумя вертикальными образующими, проходящими через центры соседних с ним нижних пиков паза, каждьй второй нижний пик паза выполнен открытым и их угловой шаг равен угловому шагу каналов корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1984 |
|
SU1196224A1 |
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛЛОННЫЙ ПИСТОЛЕТ | 2000 |
|
RU2172459C1 |
| Складной стоечный поддон | 1990 |
|
SU1781140A1 |
| Автономный пробоотборник | 1990 |
|
SU1786384A1 |
| Механизм фиксации захватного органа грузозахватного устройства | 1983 |
|
SU1237600A1 |
| Захватное устройство для изделий | 1988 |
|
SU1532515A1 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2013 |
|
RU2513859C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ БАНКНОТ | 2001 |
|
RU2275686C2 |
Изобретение относится к подъемно-транспортному оборудованию, в частности - к грузозахватным устройствам. Целью изобретения является обеспечение автоматического захвата и освобождение груза. Устройство работает следующим образом. Захват опускают на груз, снабженный стержнями. Стержни входят в каналы и открытый пик 13 паза 10. Цилиндр 3 и защелка 9 от усилия стержней поворачиваются. При опущенном захвате стержни размещены в пиках 11 паза 10. При последующем подъеме захвата стержни перемещаются в пики 12 паза 10, а цилиндр 3 перекрывает входы каналов. Производится транспортировка груза. После установки груза на место при опускании захвата стержни перемещаются в пики 11 паза 10. При этом происходит еще одна фаза поворота защелки 9. Открытые пики 13 паза 10 совмещаются. При последующем подъеме захвата происходит возврат цилиндра 3 в исходное положение и стержни беспрепятственно выходят из захвата. Захват готов к последующей работе. 5 ил.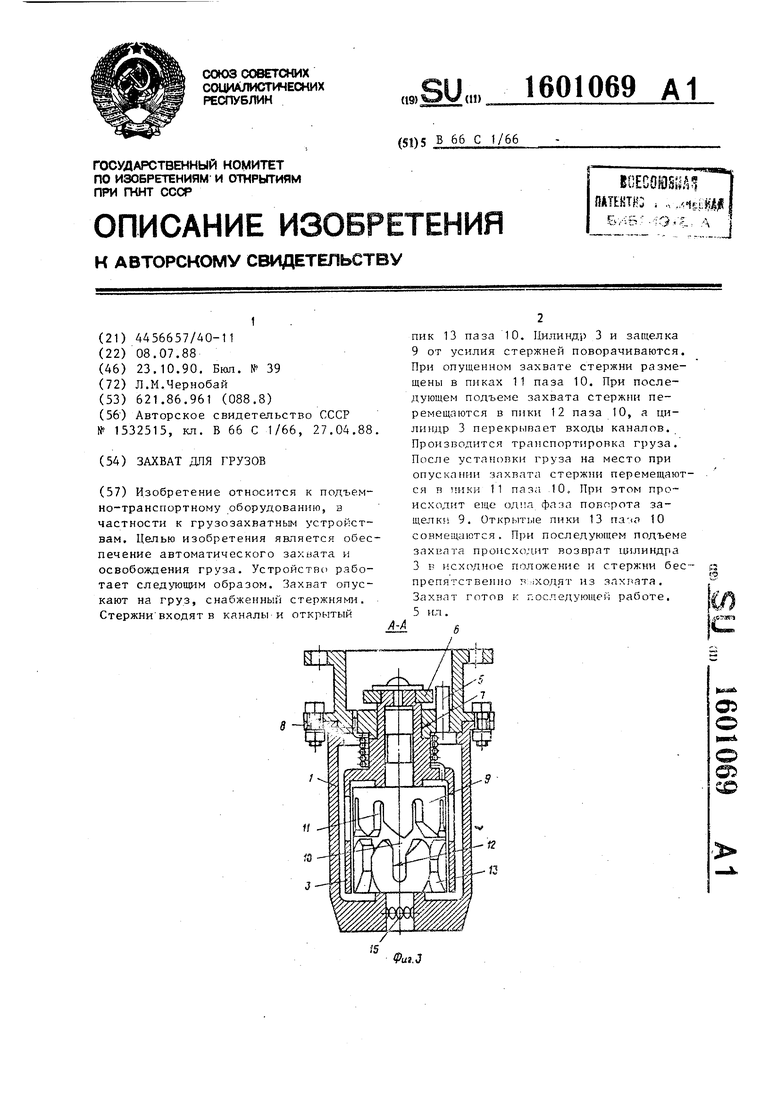
%г2
Редактор С.Пекарь
Составитель С,Осипов
Техред Л.Сердюкова Корректор М.Кучерявая
Заказ 3244
Тираж 605
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ CQCP 113035, Москва, Ж-35, Раушская наб., д. А/
Пройз водствённо-йздательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
а/2.
Подписное
| Захватное устройство для изделий | 1988 |
|
SU1532515A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
