Изобретение относится к под1)е.мно-тран- спортному оборудованию, а именно к механизмам фиксации захватного органа.
Цель изобретения - новышение удобства в эксплуатации нутем исключения всно- могательных операций.
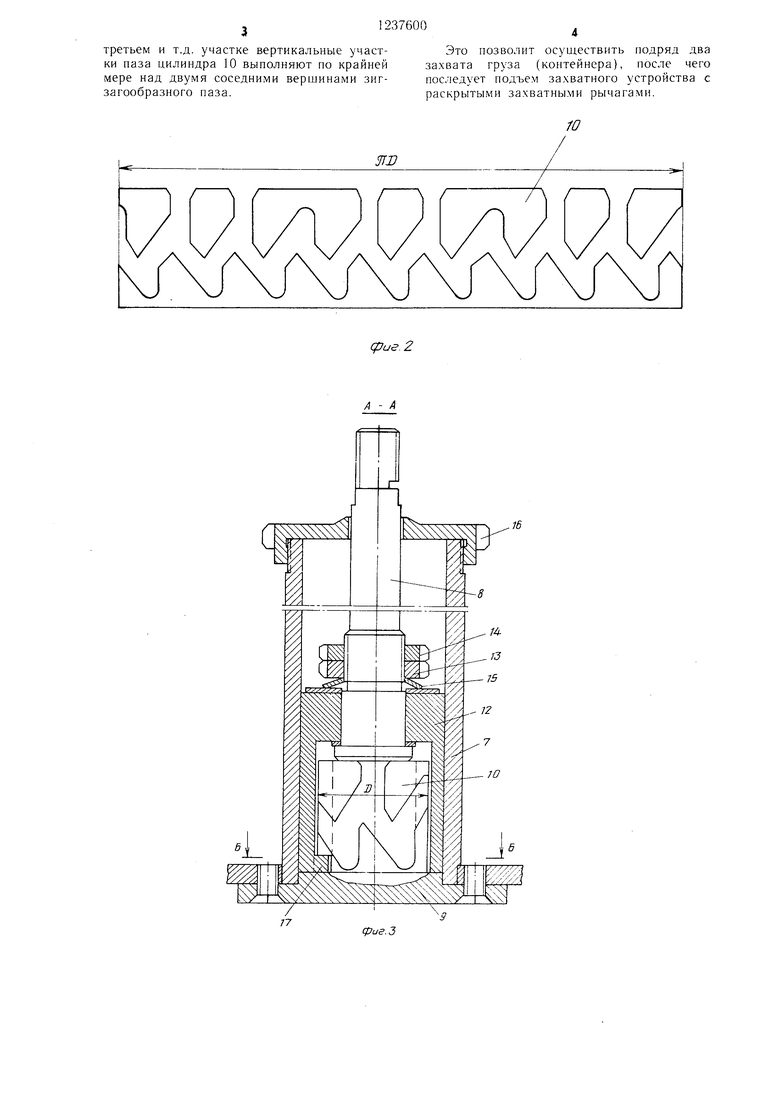
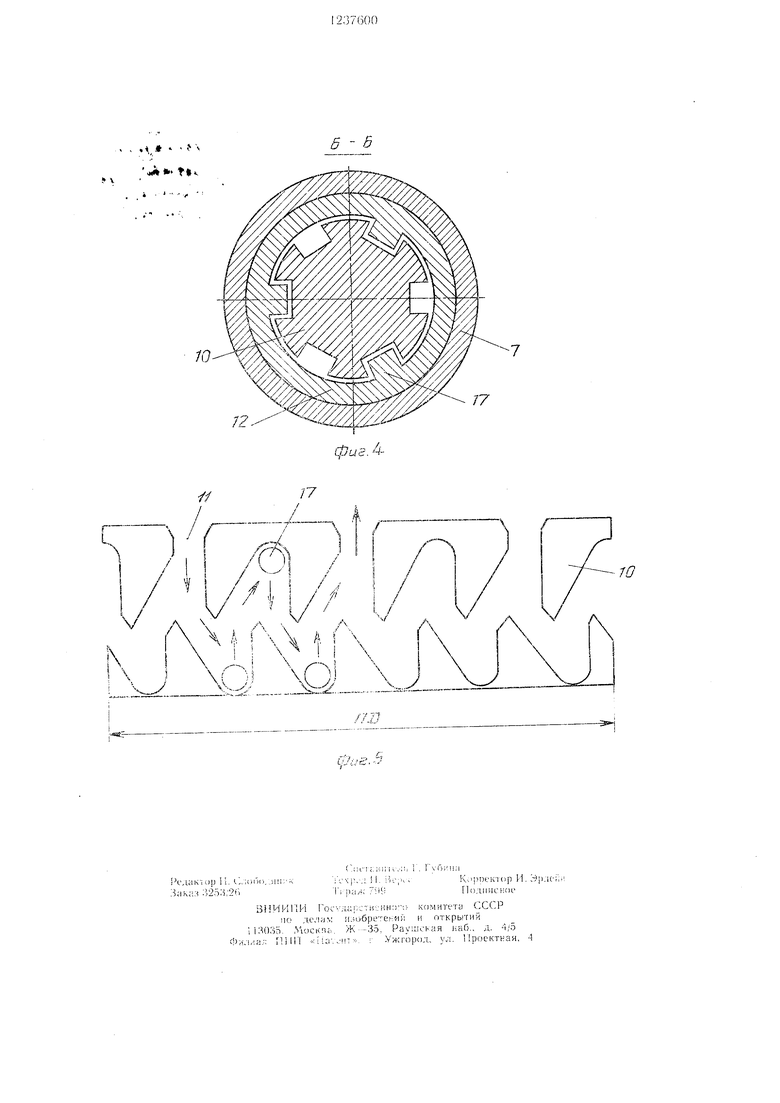
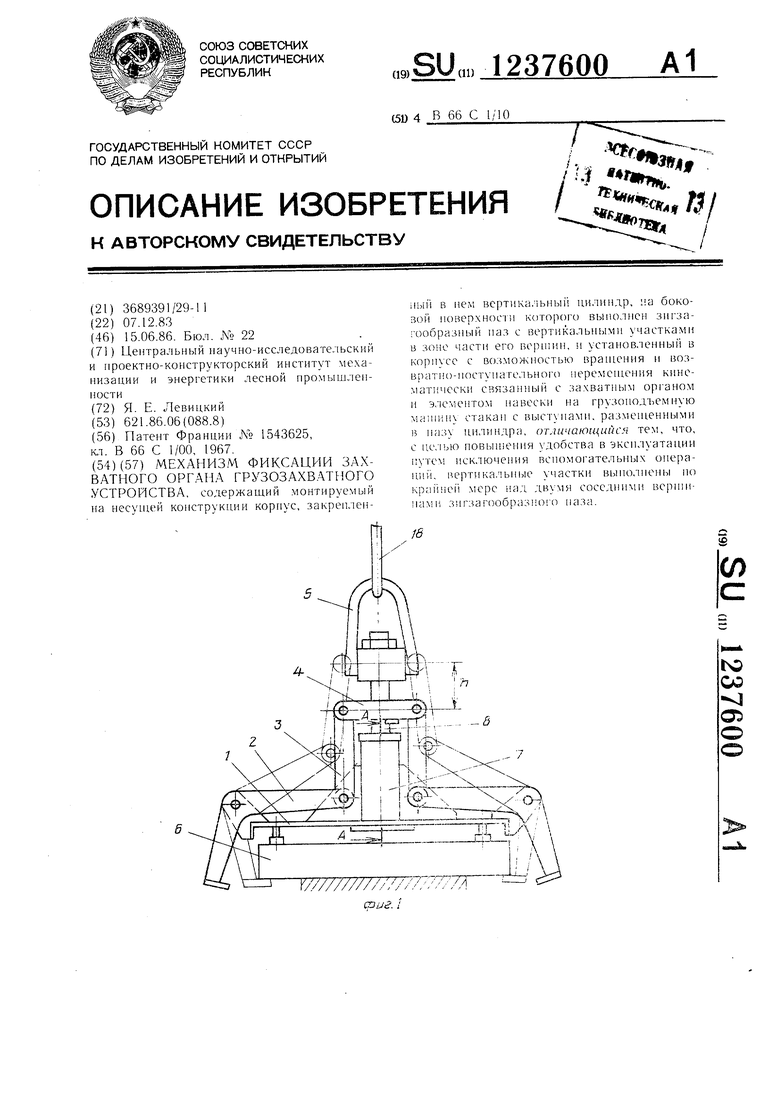
На фиг. 1 изображен нодвесной захватный орган устройства, общий вид; на фиг. 2 - развертка зигзагообразного паза вертикального цилиндра; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3; па фиг. 5 - схема перемещения выступов стакана в пазу цилиндра.
Механизм фиксации захватного органа монтируется на захватном устройстве, которое состоит из несущей конструкции (ра- мы) , на которой смонтированы захватнь е органы - рычаги 2, шарнирпо соединенные с нижними концами тяг 3, а верхние концы тяг 3 П1арнирно соединены с подвижной тра- ве)сой 4, которая соединена с элементом навески на грузоподъемную машину 5. Не- суп1.ая копструкция 1 устанавливается на груз 6, подлежащий подъему. К несущей конструкции 1 жестко прикреплен корпус 7, а к траверсе 4 - шток 8.
пVк
Полость корпуса 7 закрыта снизу фланцем 9. к которому прикреплен вертикальный цилиндр 10, на боковой поверхности которого секционпо выполнен зигзагообразный наз с вертикальными участками 11 в зоне ei o Bcpninu.
На фиг. 2 показано, что на конце штока 8 vcTaHoii. ien стакан 12, прижимаемь й к rojiOBi ce игрока 8 гайками 13 и 14 через нежесткую пружипу 15, которая препятствует произпольпо.му повороту стакана 12 относительно niTOKa 8.
Гайка 16, навинченная на корпус 7, ограничивает вертикальные перемещения стакана 12 внутри корпуса 7 в феделах вели- h. Стакан 12 снабжен тремя выступами 17, которые входят в паз циошндра И).
Устройство работает следующим обра- зол;.
Несупизя консгрукция (ра.ма) 1 устанавливается на груз 6. Когда траверса 4 поднимается на высоту h, рычаги 2,л1оворачи- ваясь, захватывают груз (на фиг. 1 показано тоики.мп линиями).
Под ьемпь1с двпжения траверсы 4 на высоту h, в|11зываю1дие захват груза, возможны, если HiTOK 8 выходит из кориуса 7 в осевом направлении. Если цилиндр препятствует этому осевому перемещению, то захватное устройство поднимается с захватными рычагами 2, зафиксированными в раскрытом состоянии. Ко1 да рама 1 опирается на груз 6, грузовой канат 18 ослабляется. Нод действием веса траверсы 4, рычагов 2, тяг 3 и штока 8 последний вместе со стаканом 12 опускается впиз, а выступы 17 стакана входят в вертикальные участки 11 паза цилиндра 10, что заранее отрегулировано при сборке. Выступы 17, опускаясь вниз, скользят по наклонным поверхностям паза до упора во внадину зи загообразного паза, заставляя стакан 12 повернуться относительно штока 8. Как видно на фиг. 4, подъем каната 18 вызовет неремещение выступов 17 до упора в верхпюю впадину паза.
При это.м выступы 17 также скользят по наклонным участкам паза цилиндра 10. заставляя стакан 12 повернутьея относительно штока 8 в том же направлении, что и раньше, а в итоге стакан 12 поверпется относительно штока 8 на 1/6 часть окружности. Дальнейщий подъем грузового каната 18 вызывает подъем захватного устройства с раскрытыми рычагами 2.
В этом положении захватное устройство подготовлено к постоянной, цикличной работе.
Далее опускают устройство на груз 6 до ослабления капата 18. Под действием веса траверсы 4, тяг 3, рычагов 2 и Н1тока 8 выступы 17 стакана 12 из верхних впадин паза опускаются вниз до упора в после. 1у1о- щую нижнюю впадину. Затем осуществляют подъем захватного устройства. Выступы 17 стакана 12, поднимаясь вверх и взаимодействуя с пазами цилиндра 10, ювора- чивают стакап 12 еще на 1/6 часть окружности вокруг оси inTOKa 8 и, пройдя по вертикальному участку паза, позволяют штоку 8 совершить путь h отпосительпо корпуса 7. При этом поднимаются траверса 4 и тяги 3 относительно рамы 1, а рычаги 2, поворачиваясь, захватывают груз 6, который затем перемещается захватным устройством на требуемое место.
Для освобождения захватного стоой- ства от груза необходимо последний хмо/кить в гптабель с ослаблением грч зового каната. При этом траверса 4, тяги ./ и шток 8 сонер- шают путь па величину h нпиз относите: ; ;
рамы I. При этом ВЫСТу 17 В.ХОДЯТ ()ИТЬ
в вертикальные участки до унора . поворачивая при этом стакап 12. Пос; едую- пщй подъем грузового каната заставит выступы 17 подняться до в верхнюю впадину паза. При этом 8 ме может совершать хода па величину h, оскольк) он будет жестко связан с рамой. Дал1)Ней. иодъе.м грузового каната вызовет пол ьем захватного устройства с раскрытыми р1.ча- гами 2.
После этого цикл захвата и освобождения захватного устройства от груза повторяется.
При необходимости поднять коптейпер со .м рузо.м (кирпич) 4acTJ 4 io раз- 1 рузить его па о.апом участке, вы.чо, п ить окончательную разгрузку на втором или
третьем и т.д. участке вертикальные участки паза цилиндра 10 выполняют по крайней мере над дву.мя соседними вершинами зигзагообразного паза.
Это позволит осуществить подряд два захвата груза (контейнера), после чего последует подъем захватного устройства с раскрытыми захватными рычагами.
q:}ue.2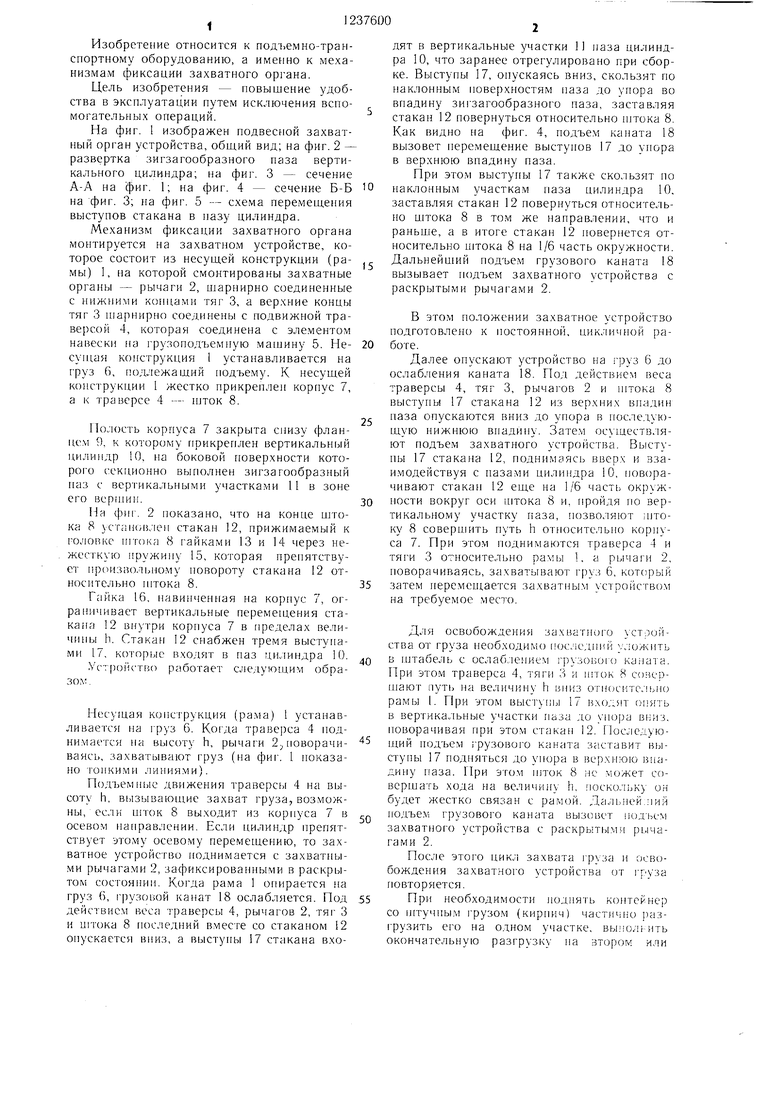
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| Захватное устройство для контейнеров | 1989 |
|
SU1726356A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захватное устройство | 1982 |
|
SU1197980A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1985 |
|
SU1324983A1 |
| Захватное устройство для изделий с отверстием | 1985 |
|
SU1364593A1 |
сриг.З
V
77
//
/7
фиг. 4
) 7б
/
V/
у
/ f
VAl
4;j
.-Si
| Патент Франции № 1543625, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
