Изобретение относится к машиностроению и может быть использовано в роботизированных комплексах для загрузки металлообрабатывающегооборудованиятрудноориентируемыми заготовками, например фланцевыми валами, вал-шестернями, фланцевыми деталями со ступицами и без них и т. д.I
Цель изобретения - повышение надежности работы устройства путем обеспечения точности позиционирования.
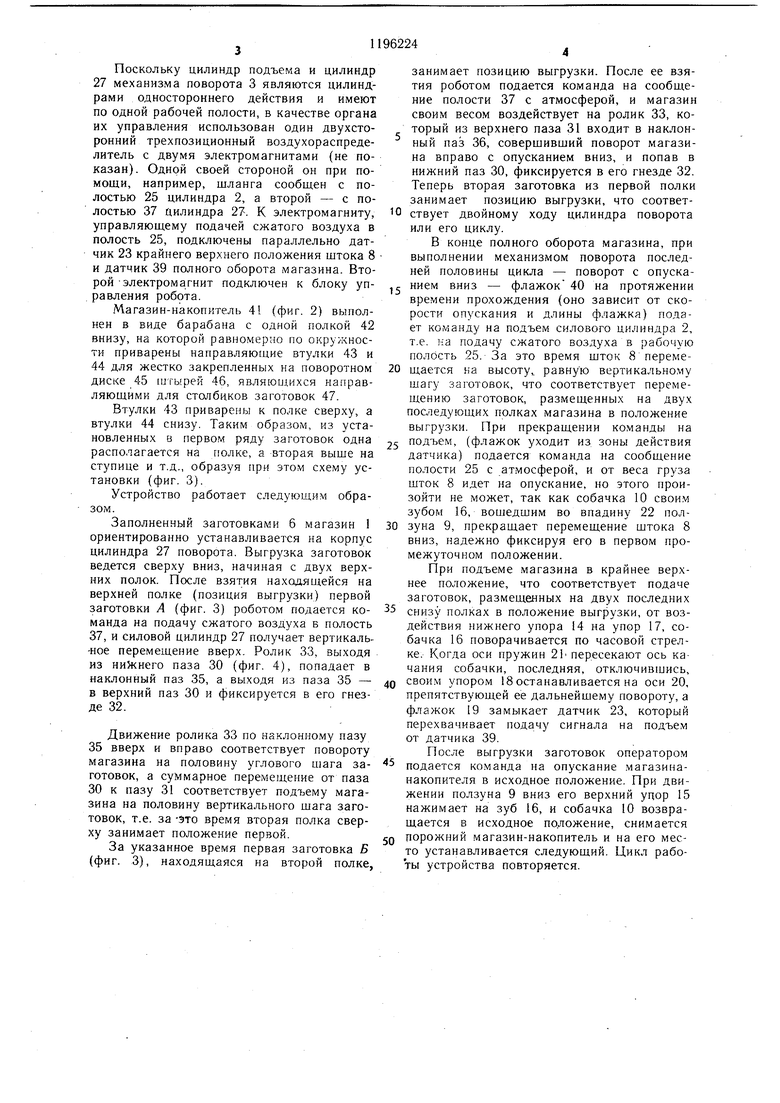
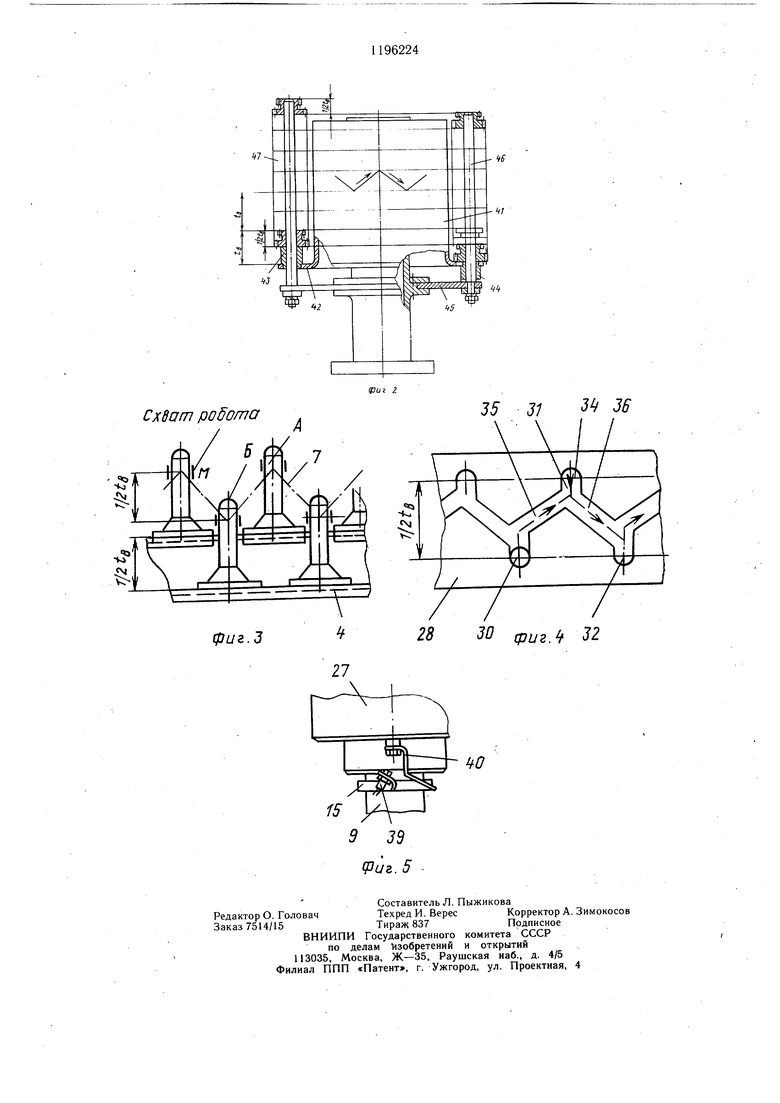
На фиг. 1 изображено устройство с магазином-накопителем для заготовок типа валов с фланцами, общий вид; на фиг. 2 - то же, для заготовок типа блоков-шестерен, шестерен со ступицами и т. д. на фиг. 3 - схема расположения заготовок на двух соседних полках; на фиг. 4 - развертка зигзагообразного копира; на фиг. 5 - флажок и датчик полного оборота магазинанакопителя.
Устройство содержит магазин 1, силовой цилиндр 2 прерывистого подъема и механизм 3 прерывистого поворота магазина 1.
Магазин выполнен в виде многополочного барабана, на кольцевых полках 4 которого равномерно по окружности расположены ложементы 5 для ориентированной установки заготовок 6.
Для максимального использования объема магазина заготовки каждой последующей полки размещены в промежутках между заготовками предыдущих полок, что позволяет при одних и тех же размерах магазина значительно (почти вдвое) увеличить количество одновременно загружаемых заготовок.
Таким образом, заготовки на последующих полках по отношению к предыдущим расположены с перекрытием высоты, т. е. со смещением на половину углового шага.
Если одноименные точки М (фиг. 3) заготовок, расположенных на двух соседних полках, последовательно соединить, получаем зигзагообразную линию 7, которую необходимо получать при вращении магазина относительно какой-либо неподвижной точки, например,схвата робота.
Для осуществления прерывистого поступательного перемещения магазина снизу вверх силовой цилиндр 2 подъема снабжен механизмом фиксации промежуточных положений штока 8, выполненным в виде храповой пары, ползун 9 которой, подобно шпонке на валу, закреплен на штоке 8, а двухпозиционная подпружиненная собачка 10 размещена в пазу 11 на оси 12 крыщки 13. На штоке 8 размещены нижний 14 и верхний 15 упоры, управляющие положением собачки 10, которая состоит из зуба 16, упоров 17 и 18, флажка 19 и оси 20. Аналогичная ось установлена и на крыщке 13.
Оси 20 размещены по обе стороны оси 12 качания собачки 10 и связаны между собой пружинами 21.
В процессе работы собачка взаимодействует своим зубом 16 с впадинами 22 ползуна 9, упором 17 с нижним упором 14, флажком 19 с датчиком 23 верхнего положения штока 8, закрепленным на кронштейне 24 корпуса цилиндра, тыльной стороной зуба 16 с верхним упором 15, а упорами 18 с осью 20 крышки 13.
Храповая рейка проходит через паз 11 и выполняет функцию шпонки, препятствуя повороту штока 8 в крыщке 13.
Расстояние между впадинами 22 ползуна 9 равно вертикальному шагу заготовок.
Подача сжатого воздуха в рабочую полость 25 цилиндра подъема осуществляется через канал 26.
Механизм 3 прерывистого поворота магазина выполнен в виде силового цилиндра 27 одностороннего действия и копира 28, представляющего собой барабан, на боковой поверхности которого выполнен зигзагообразный паз 29 одностороннего направления. Корпус цилиндра 27 и копир 28 установлены на выступающем конце штока 8, при этом корпус закреплен свободно, а копир жестко.
Зигзагообразный паз 29 состоит из вертикально расположенных нижних 30 и верхних 31 пазов. В конце этих пазов имеются гнезда 32, надежно фиксирующие ролики 33, закрепленные на оси 34, а вместе с ними корпус цилиндра 27 и установленный на нем магазин. Пазы 30 и 31 сообщены между собой наклонными пазами 35
Угловой шаг между соседними пазами 35 и 36 соответствует половине углового шага заготовок, а расстоние между центрами их гнезд (замеренное по вертикали) - половине вертикального шага заготовок,
т.е. расстоянию между соседними полками 4.
Перемещение роликов в одном направлении обеспечивается конструкцией копирного паза, которьгй составлен из нескольких
д пазов (участков). Так ролик 33, выходя из нижнего вертикального паза 30, не может попасть в соседний слева наклонный паз 36, так как это движение блокируется соседним справа пазом 35, перемещаясь по которому ролик 33 не может попасть и в расположенный по ходу справа наклонный паз 36, так как попадание в него блокируется верхним вертикальным пазом 30, попав в который ролик 33 фиксируется в его гнезде 32 и т. д. Подача сжатого воздуха в рабочую полость 37 цилиндра 27 осуществляется через
канал 38.
На верхнем упоре 15 закреплен датчик 39 взаимодействующий с приходным флажком 40, закрепленным на корпусе цилиндра 27..
Поскольку цилиндр подъема и цилиндр 27 механизма поворота 3 являются цилиндрами одностороннего действия и имеют по одной рабочей полости, в качестве органа их управления использован один двухсторонний трехпозиционный воздухораспределитель с двумя электромагнитами (не показан). Одной своей стороной он при помощи, например, шланга сообщен с полостью 25 цилиндра 2, а второй - с полостью 37 Цилиндра 27. К электромагниту, управляющему подачей сжатого воздуха в полость 25, подключены параллельно датчик 23 крайнего верхнего положения щтока 8 и датчик 39 полного оборота .магазина. Второй -электромагнит подключен к блоку управления робота.
Магазин-накопитель 4 (фиг. 2) выполнен в виде барабана с одной полкой 42 внизу, на которой равномерно по окружности приварены направляющие втулки 43 и 44 для жестко закрепленных на поворотном диске 45 штырей 46, являющихся направляющими для столбиков заготовок 47.
Втулки 43 приварены к полке сверху, а втулки 44 снизу. Таким образом, из установленных а первом ряду заготовок одна располагается на полке, а вторая выще на ступице и т.д., образуя при этом схему установки (фиг. 3).
Устройство работает следующим образом.
Заполненный заготовками б магазин 1 ориентированно устанавливается на корпус цилиндра 27 поворота. Выгрузка заготовок ведется сверху вниз, начиная с двух верхних полок. После взятия находяп ейся на верхней полке (позиция выгрузки) первой заготовки А (фиг. 3) роботом подается команда на подачу сжатого воздуха в полость 37, и силовой цилиндр 27 получает вертикальное перемещение вверх. Ролик 33, выходя из нижнего паза 30 (фиг. 4), попадает в наклонный паз 35, а выходя из паза 35 - в верхний паз 30 и фиксируется в его гнезде 32.
Движение ролика 33 по наклонному пазу 35 вверх и вправо соответствует повороту магазина на половину углового тага заготовок, а суммарное перемещение от паза 30 к пазу 31 соответствует подъему магазина на половину вертикального щага заготовок, т.е. за -это время вторая полка сверху занимает положение первой.
За указанное время первая заготовка Б (фиг. 3), находящаяся на второй полке,
занимает позицию выгрузки. После ее взятия роботом подается команда на сообщение полости 37 с атмосферой, и магазин своим весом воздействует на ролик 33, который из верхнего паза 31 входит в наклонный паз 36, соверщивщий поворот магазина вправо с опусканием вниз, и попав в нижний паз 30, фиксируется в его гнезде 32. Теперь вторая заготовка из первой полки занимает позицию выгрузки, что соответствует двойному ходу цилиндра поворота или его циклу.
В конце полного оборота магазина, при выполнении механизмом поворота последней половины цикла - поворот с опускаг нием вниз - флажок 40 на протяжении времени прохождения (оно зависит от скорости опускания и длины флажка) подает команду на подъем силового цилиндра 2, т.е. на подачу сжатого воздуха в рабочую полость 25. За это время щток 8 переме0 ц;ается ка высоту,, равную вертикальному щагу заготовок, что соответствует перемещению заготовок, размещенных на двух последующих полках магазина в положение выгрузки. При прекращении команды на
5 подъем, (флажок уходит из зоны действия датчика) подается команда на сообщение полости 25 с ат.мосферой, и от веса груза щток 8 идет на опускание, но этого произойти не может, так как собачка 10 своим зубом 16, вощедщим во впадину 22 ползуна 9, прекращает перемещение щтока 8 вниз, надежно фиксируя его в первом промежуточном положении.
При подъеме магазина в крайнее верхнее положение, что соответствует подаче заготовок, размещенных на двух последних
снизу полках в положение выгрузки, от воздействия нижнего упора 14 на упор 17, собачка 16 поворачивается по часовой стрелке. Когда оси пружин 2Ь пересекают ось качания собачки, последняя, отключившись,
Q своим упоро.м 18 останавливается на оси 20, препятствующей ее дальнейщему повороту, а флажок 19 замыкает датчик 23, который перехвачивает подачу сигнала на подъем от датчика 39.
После выгрузки заготовок оператором
5 подается команда на опускание .магазинанакопителя в исходное положение. При движении ползуна 9 вниз его верхний упор 15 нажимает на зуб 16, и собачка 10 возвращается в исходное положение, снимается
0 порожний магазин-накопитель и на его место устанавливается следующий. Цикл работы устройства повторяется.
Я
и
п46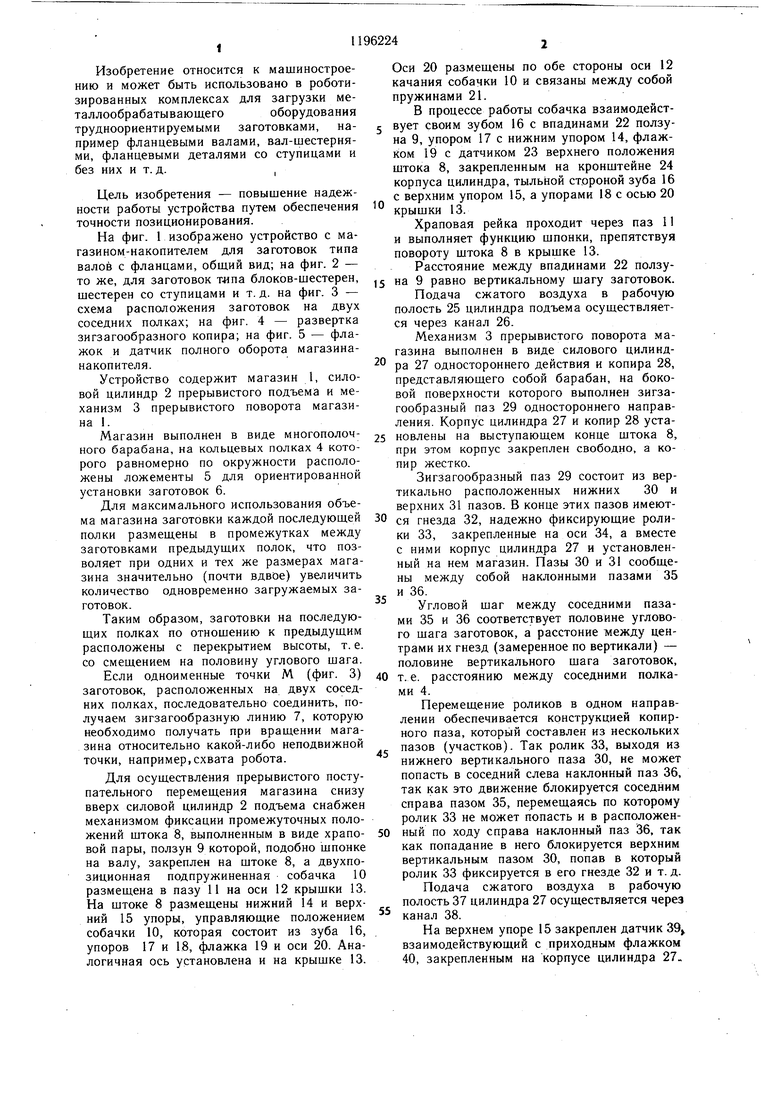
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-поворотное устройство для укладки изделий | 1980 |
|
SU963681A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Штамп для рубки листового материала | 1983 |
|
SU1181792A1 |
| Устройство для контроля уровня материала | 1986 |
|
SU1368083A1 |
| Цепной привод шаговой подачи заготовок в рабочую зону обрабатывающей машины | 1985 |
|
SU1268255A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Трубогибочный станок | 1976 |
|
SU662196A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
| Автоматизированный комплекс для изготовления деталей из плоского материала | 1986 |
|
SU1349847A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК, содержащее многопозиционный магазин, механизм поворота магазина с приводом от силового цилиндра, .механизм подъема, выполненный в виде силового цилиндра, и-датчики, от личающееся тем, что, с целью повышения надежности работы устройства, механизм поворота выполнен в виде кулачка, установленного на конце штока силового цилиндра и связанного с его корпусом посредством дополнительно введенного в устройство пальца, жестко закрепленного на корпусе, установленного с возможностью возвратно-поступательного перемещения относительно штока, при этом магазин установлен на корпусе силового цилиндра механизма поворота, шток которого жестко закреплен со штоком силового цилиндра механизма подъема, снабженного механизмом шагового перемещения. (Л О) ю ю 4
J
t
tf
liS
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
