11214955
Изобретение относится к машинороению и может быть использовано импульсных вариаторах и других ханизмах.
Целью изобретения является вьпление нагрузочной способности тем обеспечения равномерного на ужеш1Я всех собачек.
6 . и бач ход
по 6 в под пов лег по в р пер мих в р лес в з кол ков кол опо кра вую дае на все
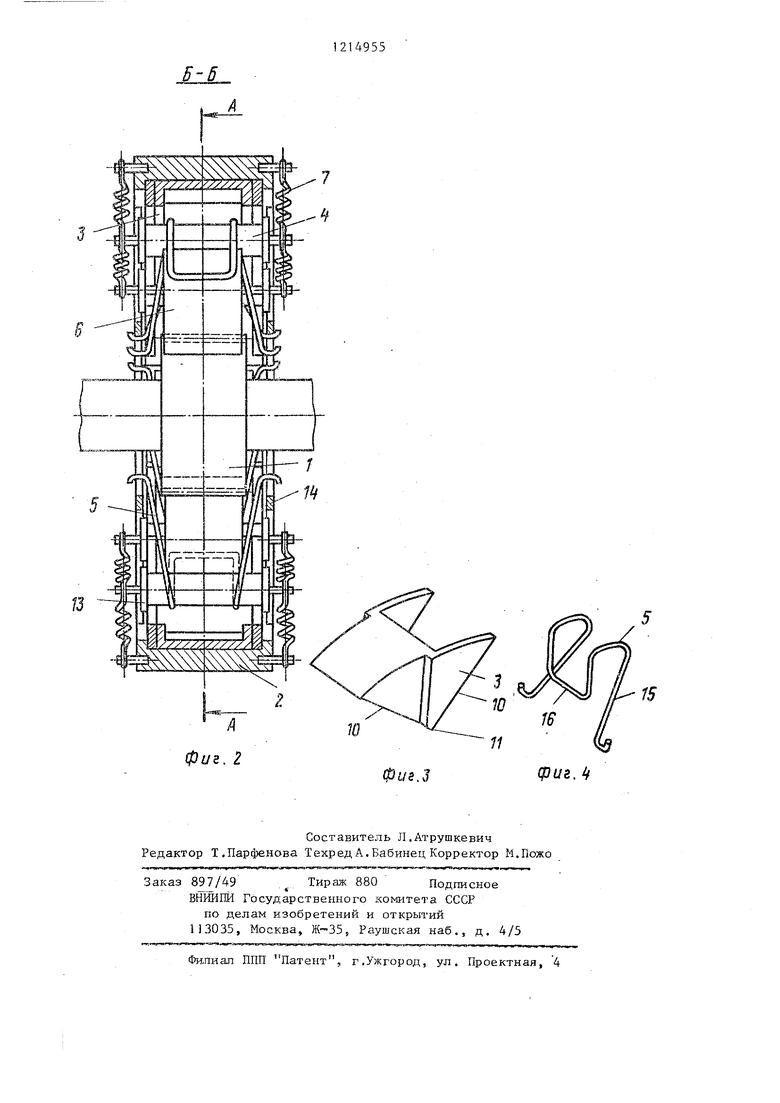
На фиг.1 изображен предлагаемый механизм (разрез А-А на фиг,2); на фиг.2 - разрез Б-Б на фиг.1; на фиг,
опора; на фиг.А г- упругий элемен осуществляющий поджим собачки к крановому колесу.
Яредпагаемый храповой механизм свободного хода содержит: храповое колесо 1, соосную с ним обойму 2, размещенные в ней равномерно по окружности опоры 3 в виде клиньев, на которых расположены оси 4, подпружи- ненных упругими элементами 5 собачек 6, взаимодействующих с храповым колесом 1, и упругие элементы 7, рас положенные между обоймой 2 и осями
4собачек 6, поджимающие оси 4 собачек 6 к опорам 3. Опоры 3 установлены
на,внутренней поверхности обоймы 2, опора 8 закреплена на обойме 2, на- пример, при помощи запресованных штифтов 9, а остальные имеют возможность перемещения вдоль окружт- ности. Боковые поверхности 10 опор 3, обращенные к соседним опорам
выполнены прямолинейными и наклонены к радиусу обоймы 2, а сами опоры установлены вершинами 11 к оси механизма. Оси 4 собачек 6 расположены в клиновых полостях 12 между соответствующими опорами 3 и Удерживаются от осевого перемещения дисками 13. На обойме закреплены два кольца 14, внутренний диаметр которых равен наружному диа- метру храпового колеса 1, а упругие элементы 5 одним концом 15 угшраются ч опоры 8, огибают оси 4 собачек
5
0
0
0 5
6 . и другим концом 16 поджимают собачки 6 к храповому колесу 1. Храповой механизм свободного хода работает следующим образом.
При вращении храпового колеса 1 по часовой стрелке одна из собачек 6 вступает в работу первой. Ее ось под действием силы со стороны храпового колеса 1 раздвигает две прилегающие опоры 3. Они перемещаются по внутренней поверхности обоймы 2 в разные стороны, вызывая тем самым перемещение осей 4 собачек и самих собачек 6, еще не вступивших в работу, навстречу храповому колесу 1. Когда все собачки 6 входят в зацепление с зубьями храпового колеса 1 и на них действуют одинаковые усилия со стороны храпового колеса 1, перемещение подвижных опор 3 относительно обоймы 2 прекращается . Крутящий момент, деист™ на храповое колесо 1, передается через собачки 6 и опору 8 на обойму 2. В работе участвуют все собачки 6,
При вращении храпового колеса 1 против часовой стрелки происходит свободный ход во время которого упругие элементы 7 возврал(ают оси 4 собачек 6 в исходное положение. Кроне того, упругие элементы 7 служат для удержания опор 3 в обойме 2, Оси 4 собачек 6 и сами собачки 6 во время работы перемещаются относительно обоймы 2, Поэтому применен поджим собачек 6 к храповому колесу 1 с помощью упругих элементов 5, усилие которых не зависит от положения осей 4 собачек 6 относи тельно обоймы 2.
Предлагаемое выполнение храпового механизма свободного хода позволяет добиться равномерного погружения всех собачек. Следствием этого является повьш1енная нагрузочная способность, надежность и долговечность механизма свободного хода.
16
11
W
fpue.j
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Храповый механизм свободного хода | 1985 |
|
SU1323786A1 |
| Храповой механизм свободного хода | 1984 |
|
SU1200029A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2221943C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| Храповой механизм свободного хода | 1987 |
|
SU1603094A1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2008542C1 |
| Механизм свободного хода | 1986 |
|
SU1318751A1 |
| ВАРИАТОР | 1997 |
|
RU2151934C1 |
| Храповой механизм свободного хода | 1983 |
|
SU1200028A1 |
| Храповой механизм свободного хода | 1989 |
|
SU1723389A1 |


Составитель Л.Атрушкевич Редактор Т.Парфенова Техред А. Бабинец Корректор М.Пожо
Заказ 897/49. Тираж 880Подписное
ВНЙЙПЙ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-355 Раушская наб., д. 4/5
Филиал ППП Патент, г.Ужгород, ул. Проектная, 4
| Электрический плавильный аппарат | 1922 |
|
SU893A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Храповой механизм свободного хода | 1979 |
|
SU836415A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
