VU2.J
.31603350
Изобретение относится к автоматике и. может Применяться в агрегатах различного назначения, в которых в зависимости от услоёий работы необходимо либо поддерживать постоянное давление газа, либо изменять это давление на заданную величину,
Цель изобретения - повьтение точности-регулирования.
Способ регулирования давления газа заключается в том, что изменяют расход газа, проходящего между двумя, рабочими поверхностями, путем созда10
ватель 2 может быть выполнен в виде пластинчатого (фиго1), дискового (фиг.2 ) или цилиндрического (фиГсЗ) пьезокерамического элемента, имеющего на поверхностях -электроды для соединения с генератором электрических сигналово .Для увеличения амплиту ды колебаний пьзокерамический преобразователь 2 может быть снабжен механическим виброусилителем Гне пок.а- зан. Опорный элемент 3 установлен в корпусе 1 с возможностью перемещения в направлении по нормали к своей рания вйбропленки между рабочими поверх- з бочей поверхности ностями изменением частоты и ампли- Устройство дпя реализации способа туды колебаний одной из рабочих по- регулирования давления газа работает верхностей, а также в том, что изменяют угол наклона одной из рабочих по
верхностей и частоту колебаний другой рабочей поверхности с обеспечением сохранения постоянным коэффициента подсасывания,.
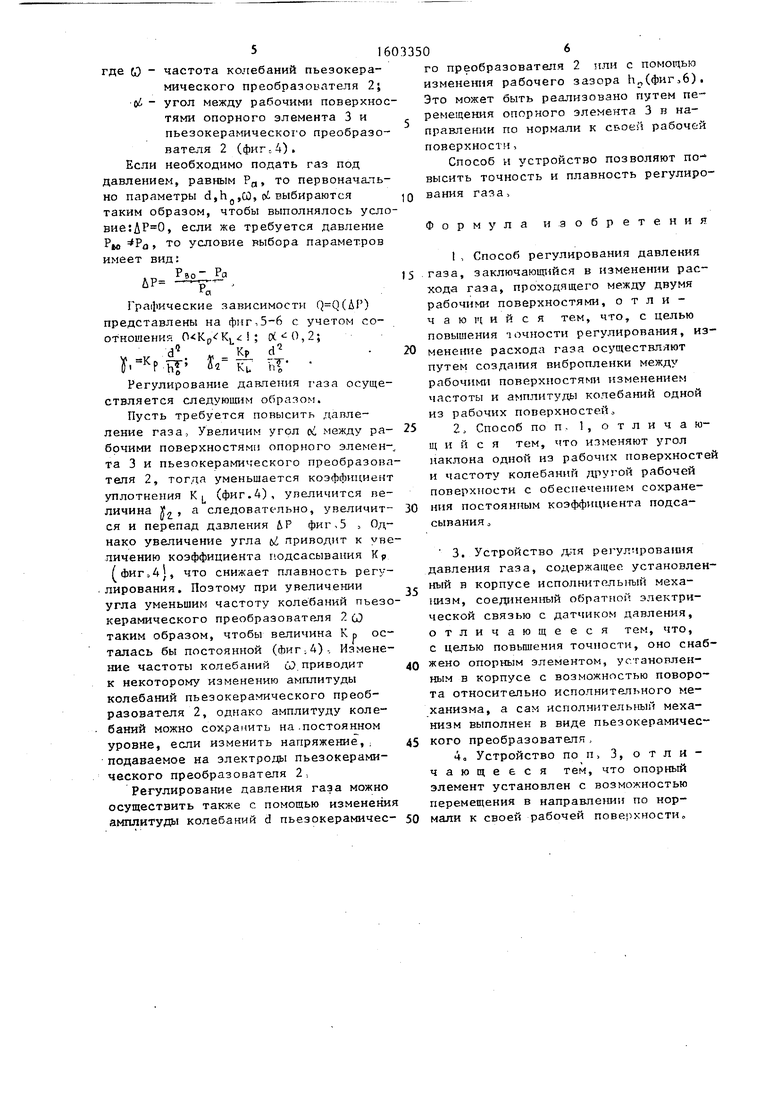
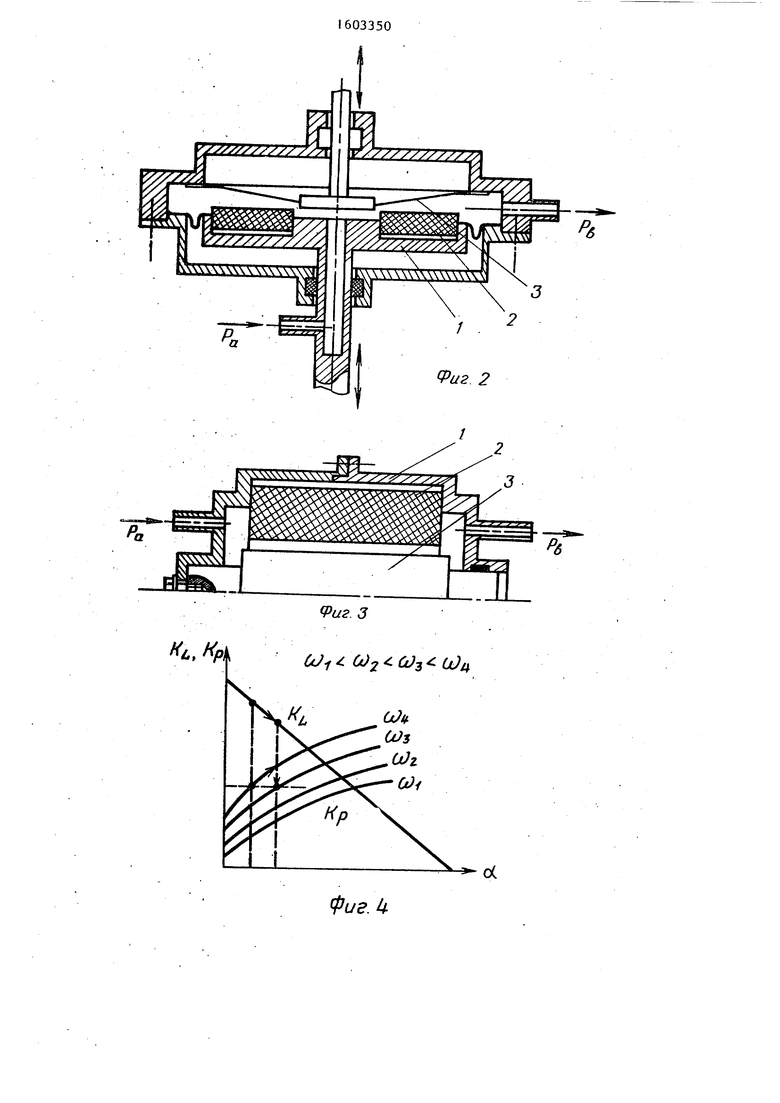
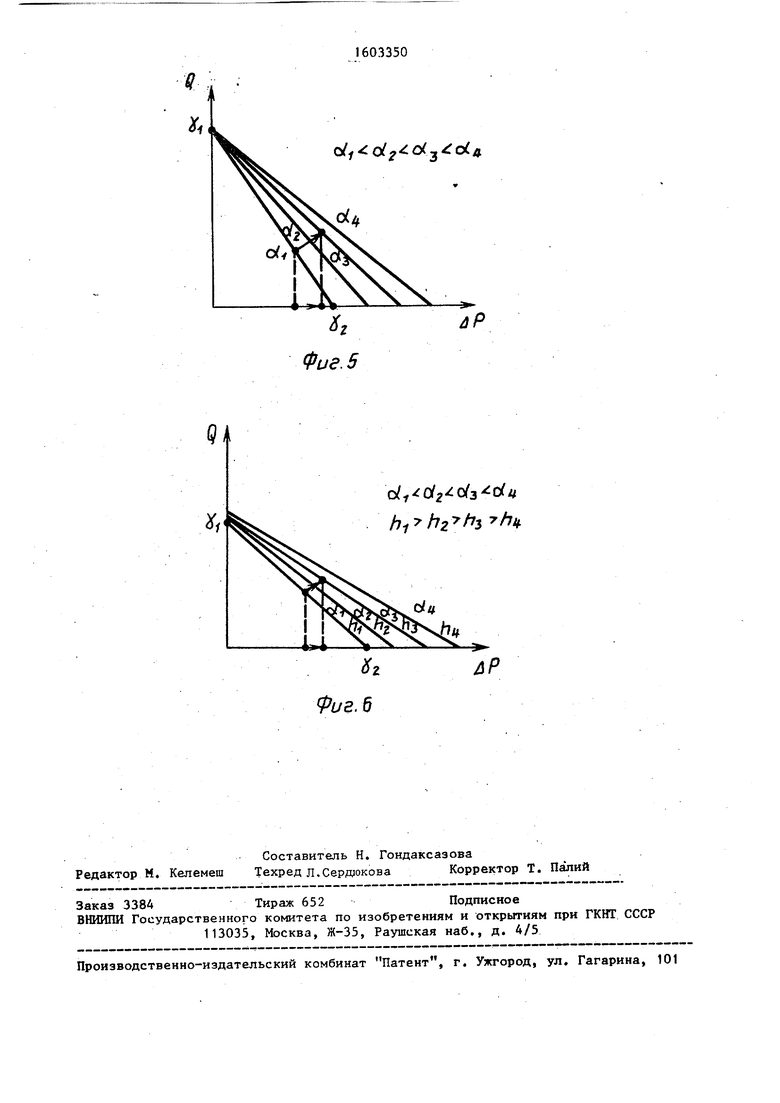
На фиг Л представлено устройство дпя реализации способа, общий вид; на фиг о. 2 - вариант устройства, га- зовая вибропленка создается межлу двумя дисковыми элементами; на фиг.З - то же, газовая вибропленка создается между двумя цилиндрическими опорными поверхностями; на фиг 4 - графические зависимости коэффициентов подсасывания и уплотнения от угла наклона опорнь1х поверхностей друг к дру-. . ГУ; на фиг 5 графические зависимости газового потока от перепада , давления при различных углах наклона между опорными поверхностями; на фиг. 6 - графические зависимости газового потока от перепада давлений при различных величинах зазоров между опорными поверхностями и различных амплитудах колебаний пьезчэке- рамического преобразователя
Устройство для реализации способа регулирования давления газа содержит установленный в корпусе 1 исполни- . тельный механизм 2, соединенный обратной электрической связью с датчиком , давления (не показан). Регулятор снабжен опорным элементом 3, размещенным в корпусе 1 с возможностью поворота относительно исполнительного механизма 2,
Исполнительный механизм 2 выполнен в виде пьезокерамического преоб- разователЯр соединенного с генерато- ром электрических, сигналов (не пока- зан). Пьезокерамический преобразо20
следующим образом.
Газ от источника подается на вход
регулятора с давлением, равным Р. Одновременно на электроды пьезокерамического преобразователя 2 от генератора электрических сигналов подается напряжение, которое вследствие
25 обратного пьезоэффекта преобразуется в механические колебания пьезокерамического элемента 2, Это приводит к образованию газовой вибропленки между рабочими поверхностями пьезоке
30 рамического преобразователя 2 и опор ного элемента 3 При этом на выходе из регулятора устанавливается давление газа, равное Рцо
Для малых величин газового потока справедливо соотношение
35
40
- ,
По
(1)
45
50
где Q - величина газового потока через рабочий зазор; d - амплитуда колебаний пьезокерамического преобразователя 2;
средний зазор между рабочими поверхностями опорного элемента 3 .и пьезокерамического преобразователя 2; коэффициент подсасывания ; кожффициент уплотнения;- UP - относительный перепад давления, равный
h. Кр - а
(2)
55 Коэффициенты К „ и К могут быть вычис лены по известным формулам или определены по графическим зависимостям;
,(a),d); K(f(ft:),
ватель 2 может быть выполнен в виде пластинчатого (фиго1), дискового (фиг.2 ) или цилиндрического (фиГсЗ) пьезокерамического элемента, имеющего на поверхностях -электроды для соединения с генератором электрических сигналово .Для увеличения амплитуды колебаний пьзокерамический преобразователь 2 может быть снабжен механическим виброусилителем Гне пок.а- зан. Опорный элемент 3 установлен в корпусе 1 с возможностью перемещения в направлении по нормали к своей рабочей поверхности Устройство дпя реализации способа регулирования давления газа работает
бочей поверхности Устройство дпя реализации способа регулирования давления газа работает
следующим образом.
Газ от источника подается на вход
регулятора с давлением, равным Р. Одновременно на электроды пьезокерамического преобразователя 2 от генератора электрических сигналов подается напряжение, которое вследствие
обратного пьезоэффекта преобразуется в механические колебания пьезокерамического элемента 2, Это приводит к образованию газовой вибропленки между рабочими поверхностями пьезокерамического преобразователя 2 и опорного элемента 3 При этом на выходе из регулятора устанавливается давление газа, равное Рцо
Для малых величин газового потока справедливо соотношение
- ,
По
(1)
где Q - величина газового потока через рабочий зазор; d - амплитуда колебаний пьезокерамического преобразователя 2;
средний зазор между рабочими поверхностями опорного элемента 3 .и пьезокерамического преобразователя 2; коэффициент подсасывания ; кожффициент уплотнения;- UP - относительный перепад давления, равный
h. Кр - а
(2)
55 Коэффициенты К „ и К могут быть вычислены по известным формулам или определены по графическим зависимостям;
,(a),d); K(f(ft:),
где t) частота колебаний пьезокера- мического преобразователя 2; oi - угол между рабочими поверхностями опорного элемента 3 и пьезокерамическот о преобразователя 2 (фиг,4). Если необходимо подать газ под давлением, равным Рд, то первоначально параметры d,h|j,Cx), oi выбираются таким образом, чтобы выполнялось усло- вие:ДР 0, если же требуется давление РМ РО условие выбора параметров имеет вид:
.„ РВО- Рр
иг- р
а
Графические зависимости (Af ) представлены на фиг,5-6 с учетом со- otHOL ieHHK ; (Х - 0,2;
го преобразователя 2 или с помощь изменения рабочего зазора К,,(фиг,6 Это может быть реализовано путем п ремещения опорного элемента 3 в на правлении по нормали к с&оей рабоч поверхности,
Способ и устройство позволяют п высить точность и плавность регули вания газа.
Формул
и -а
обретени
15
)f.Phf
Y 02 KU
20
ьТ1 о - I о
Регулирование давления газа осуществляется следующим образом.
Пусть требуется повысить давле- ление газа, Увеличим угол с между ра- 25 брчими поверхностями опорного элемен-, та 3 и пьезокерамического преобразователя 2, тогда уменьщается коэффициент уплотнения К | (фиг.4), увеличится величина J, а следовательно, увеличит- 30 ся и перепад давления &Р фиг,5 , Однако увеличение угла t приводит к vne- личению коэффициента подсасывания Кр
(фиг,4|, что снижает плавность регу- . лирования. Поэтому при увеличении угла уменьшим частоту колебаний пьезокерамического преобразователя 2 ( таким образом, чтобы величина Кр осталась бы постоянной (фиг;4). Изменение частоты колебаний и) приводит к некоторому изменению амплитуды колебаний пьезокерамического преобразователя 2, однако амплитуду колебаний можно сохранить на .постоянном уровне, если изменить напряжение,, подаваемое на электроды пьезокерамического преобразователя 2,
Регулирование давления газа можно осуществить также с помощью изменения
t, Способ регулирования давлени газа, заключающийся в изменении ра хода газа, проходящего между двумя рабочими поверхностями, отличающийся тем, что, с делью повышения точности регулирования, менение расхода газа осуществляют путем создания вибропленки между рабочими поверхностям изменением частоты и амплитуды колебаний одн из рабочих поверхностей о
2. Способ по п- 1, отлича щийся тем, что изменяют угол наклона одной из рабочих поверхно и частоту колебаний другой рабоче поверхности с обеспечением сохран ния постоянным коэффициента подса сывания о
3. Устройство для регул 1рова1ш давления газа, содержащее установл ный в корпусе исполнителытый меха 1ШЗМ, соединенный обратной электр ческой связью с датчиком давления отличающееся тем, что с целью повышения точности, оно с жено опорным элементом, установле ным в корпусе с возможностью пово та относительно исполнительного м ханизма, а сам исполнительный мех низм выполнен в виде пьезокерамич 45 кого преобразователя,
Чо Устройство по п 3, отли чающееся тем, что опорный элемент установлен с возможностью перемеЕ1ения в направлении по нор35
40
у у I ОП ID i dix/Ti t i - i-i wi- i - i.....--- ..,
амплитуды колебаний d пьезокерамичес- 50 мали к своей рабочей поверхности ,
3350
го преобразователя 2 или с помощью изменения рабочего зазора К,,(фиг,6). Это может быть реализовано путем перемещения опорного элемента 3 в направлении по нормали к с&оей рабочей поверхности,
Способ и устройство позволяют повысить точность и плавность регулирования газа.
Формул
и -а
обретения
t, Способ регулирования давления газа, заключающийся в изменении расхода газа, проходящего между двумя рабочими поверхностями, отличающийся тем, что, с делью повышения точности регулирования, изменение расхода газа осуществляют путем создания вибропленки между рабочими поверхностям изменением частоты и амплитуды колебаний одной из рабочих поверхностей о
2. Способ по п- 1, отличающийся тем, что изменяют угол наклона одной из рабочих поверхностей и частоту колебаний другой рабочей поверхности с обеспечением сохранения постоянным коэффициента подсасывания о
3. Устройство для регул 1рова1шя давления газа, содержащее установленный в корпусе исполнителытый меха- 1ШЗМ, соединенный обратной электрической связью с датчиком давления, отличающееся тем, что, с целью повышения точности, оно снабжено опорным элементом, установленным в корпусе с возможностью поворота относительно исполнительного механизма, а сам исполнительный механизм выполнен в виде пьезокерамичес- кого преобразователя,
Чо Устройство по п 3, отличающееся тем, что опорный элемент установлен с возможностью перемеЕ1ения в направлении по нор
..,
мали к своей рабочей поверхности ,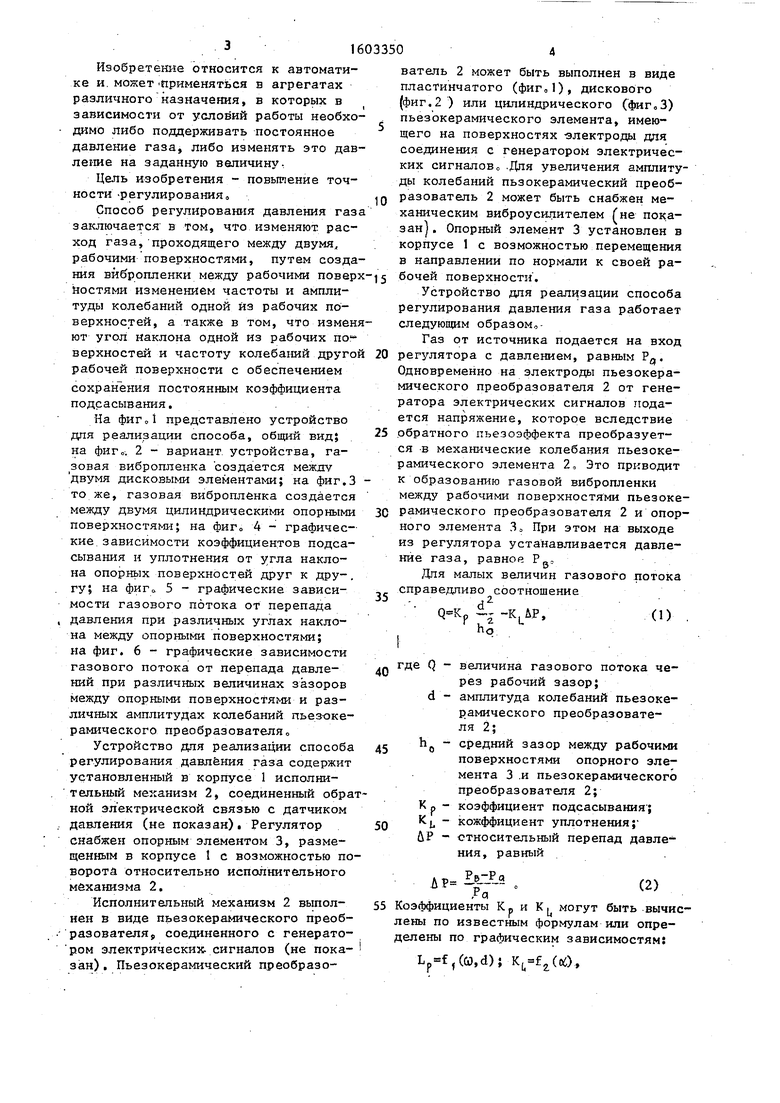
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ СТЕНКИ НЕФТЯНЫХ И ГАЗОВЫХ ТРУБОПРОВОДОВ И ЦЕЛОСТНОСТИ ВНЕШНЕЙ ИЗОЛЯЦИИ | 1996 |
|
RU2121105C1 |
| АКУСТИЧЕСКИЙ ДЕТЕКТОР ТЕКУЧЕЙ СРЕДЫ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2014 |
|
RU2688883C2 |
| Лазерно-интерференционный измеритель градиента давления в жидкости | 2016 |
|
RU2625000C1 |
| ТЕРМОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2017200C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ В БЕЗНАПОРНОМ КАНАЛЕ | 1998 |
|
RU2139503C1 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ | 1999 |
|
RU2149295C1 |
| Устройство для взвешивания | 1977 |
|
SU711371A1 |
| Микроэлектромеханический вибрационный датчик давления | 2024 |
|
RU2828647C1 |
| АКУСТООПТИЧЕСКИЙ ИНДИКАТОР КРИТИЧЕСКИХ КОНЦЕНТРАЦИЙ ОПАСНЫХ ГАЗОВ | 2007 |
|
RU2335761C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ СТИРКИ ПРЕИМУЩЕСТВЕННО ТЕКСТИЛЬНЫХ ИЗДЕЛИЙ | 1997 |
|
RU2109095C1 |
Изобретение относится к автоматике в приборостроении и может применяться в агрегатах различного назначения, в которых в зависимости от условий работы необходимо либо поддерживать постоянное давление газа, либо изменять это давление на заданную величину. Цель изобретения - повышение точности регулирования. Способ регулирования давления газа заключается в создании газовой вибропленки между двумя поверхностями и изменении угла наклона этих поверхностей друг к другу. При этом сохраняют постоянным коэффициент подсасывания за счет изменения частоты колебаний. Устройство для реализации этого способа содержит установленный в корпусе 1 пьезокерамический преобразовтель 2, соединенный обратной электрической связью с датчиком давления. Устройство снабжено опорным элементом 3, установленным в корпусе 1 с возможностью поворота относительно преобразователя 2. Опорный элемент 3 может быть установлен с возможностью перемещения по нормали к своей рабочей поверхности. Изобретения позволяют повысить точность регулирования за счет создания многопараметрической подстройки. 2 с. и 2 з.п. ф-лы, 6 ил.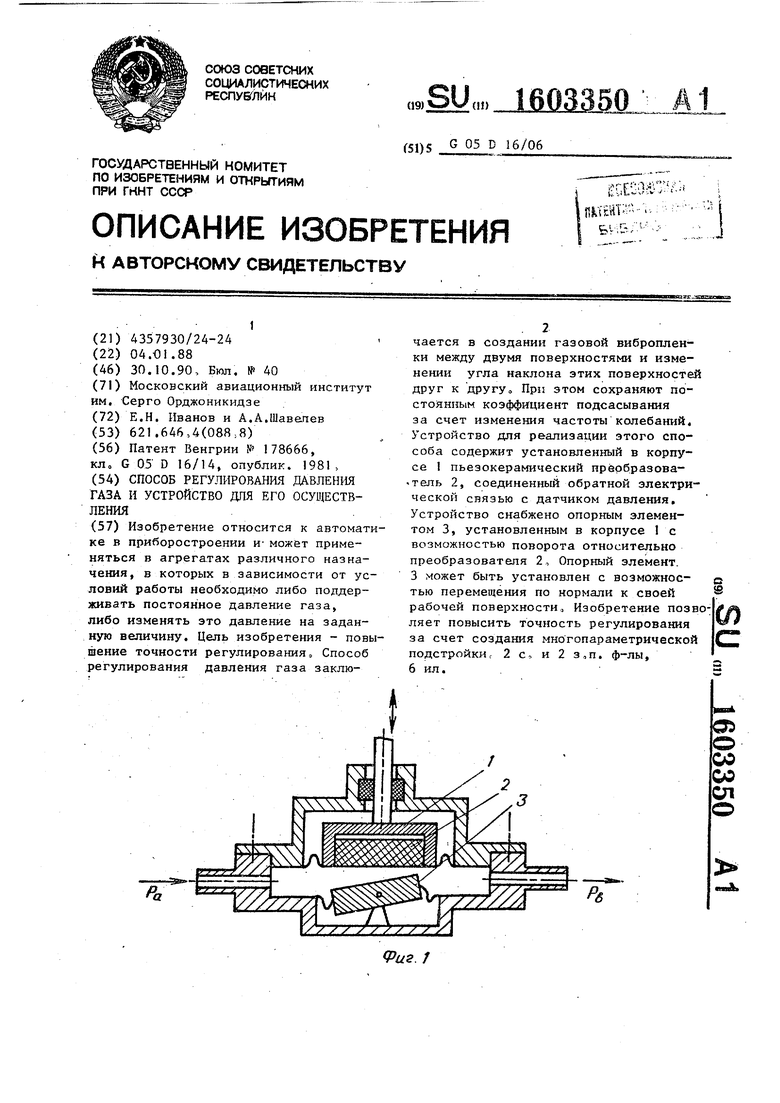
L. Л/
иг. 3 CtJi
ФигЛ
OL
сУ,г:(
hi
| ОПОРНЫЙ УЗЕЛ ПРИВОДНОГО ВАЛА КОНУСНОЙ ДРОБИЛКИ | 0 |
|
SU178666A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
