ArnKmrn //////////////
Фиг.{
Изобретение относится к машиностроению, в частности к исполнительным органам манипуляторов.
Цель изобретения - расширение технологических возможностей устройства за счет увеличения зоны обслуживания,
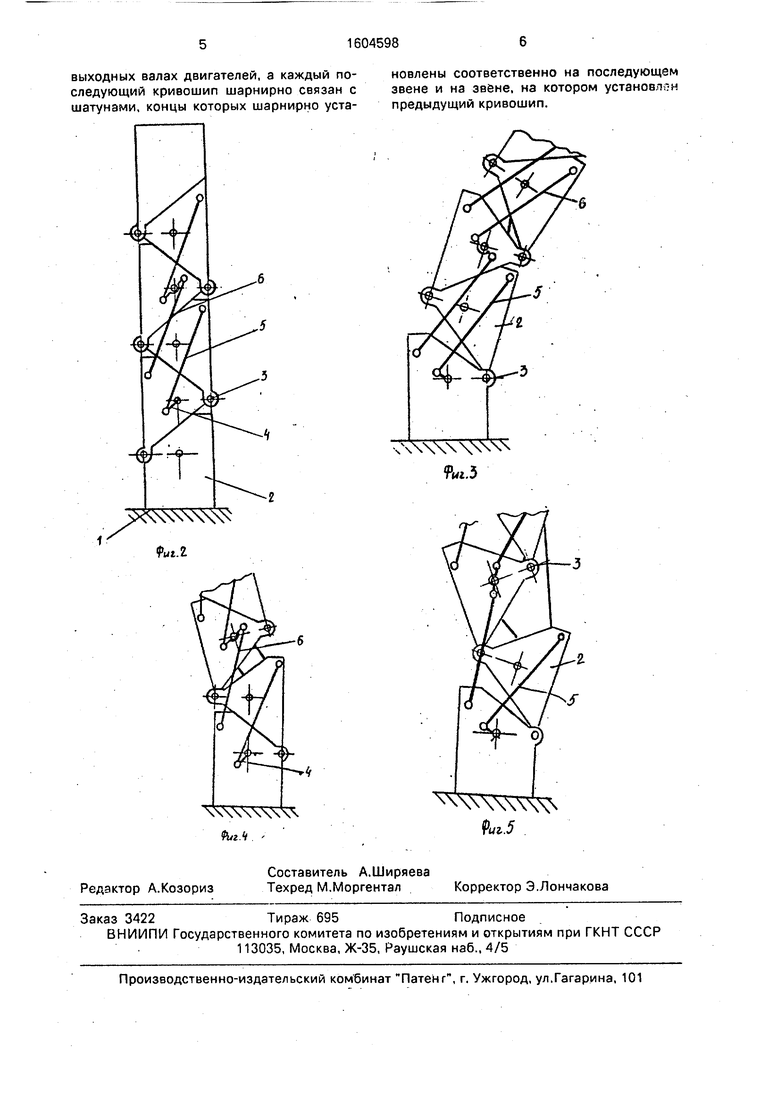
На фиг. 1 показана конструкция исполнительного устройства манипулятора; на фиг. 2 - то же, вид сзади; на фиг. 3-5 - схемы работы устройства.
Исполнительное устройство манипуля тора содержит основание 1, звенья 2, выполненные в виде пластин, имеющих форму равнобедренного треугольника, и основной и дополнительный приводы перемещения звеньев. Звенья соединены шарнирами 3, связывающими центральную вершину каждой пластины с вершиной у основания следующей пластины.
Основной и дополнительный приводы перемещения звеньев включают двигатели (не показаны) и основную и дополнительную кинематические связи, выполненные идентично в виде кривошипно-шатунных механизмов, расположенных с обеих сторон устройства. Кривошипы 4 основной и дополнительной кинематических связей установлены соответственно на нечетных и четных звеньях 2. Причем первые кривошипы каждой из кинематических связей установлены соответственно на первом звене 2, неподвижно связанном с основанием 1, и на втором звене 2 и связаны с выходными валами двигателей (не показаны), и шарнир- но связаны с шатунами 5, противоположные концы которых закреплены шарнирно на последующих звеньях 2, выполняющих функцию коромысел. Третье звено снабжено кривошипом 4 и шатуном 5, расположенными идентично первому звену. Функции коромысла в этом механизме выполняет четвертое звено и т.д. до последнего звена, несущего исполнительный орган. Кривошип 4 каждого последующего механизма с каждой стороны шарнирно связан с шатуном б, .противоположный конец которого шарнирно установлен на последующем звене 2, с которым связан кривошип 4 предыдущего кривошипно-шатунного механизма.
Устройство работает следующим образом.
В исходном положении звенья 2 сведены до контакта боковыми гранями пластин. Для изгиба устройства в плоскости пластин в одном из двух возможных направлений происходит поворот одним из двигателей соответствующего кривошипа 4 по часовой стрелке. При этом звено 2, связанное с этим кривошипом 4 шатуном 5, поворачивается на определенный угол. Одновременно поворачиваются все кривошипы основной кинематической связи, так как все они последовательно связаны шатуном теми из предыдущих звеньев, относительно кото5 рых происходит поворот последующих звеньев 2, т.е. при повороте ведущего кривошипа 4 все кривошипы 4 поворачиваются на определенный угол, звенья 2, выполняющие функции коромысел в этих механизмах,
10 поворачиваются относительно шарниров 3. Произойдет изгиб всего устройства (фиг.З). Для возврата устройства в исходное положение ведущий кривошип 4 возвращается в исходное положение, связанные с ним по15 следовательно все звенья перемещаются в исходное положение. Для изгиба в другом направлении происходит поворот ведущего первого кривошипа 4 дополнительной кинематической связи, расположенной с обрат20 ной стороны пластин, установленного на выходном валу второго двигателя на втором звене 2. При этом кривошипно-коромысло- вые механизмы с другой стороны работают аналогично, изгибая устройство в другом
25 направлении (фиг. 4).
Для увеличения линейных размеров исполнительного устройства оба двигателя в обеих сторон поворачивают оба ведущих 30 кривошипа 4, что приводит к разведению всех звеньев 2 (фиг.5).
Формулаизобретения
35 Исполнительное устройство манипулятора, содержащее основание, последовательно соединенные звенья, первое из которых связано с основанием, а последнее - с рабочим органом, и основной привод
40 перемещения звеньев, включающий двигатель и основную кинематическую связь, имеющую кривошипно-шатунные механизмы, отличающееся тем, что, с целью расширения технологических возможно45 стей за счет увеличения зоны обслуживания, оно снабжено дополнительным приводом, включающим двигатель и дополнительную кинематическую связь, идентичную основной кинематической связи, а звенья выпол50 нены в виде пластин, имеющих форму равнобедренных треугольников, центральная вершина каждого из которых шарнирно связана с вершиной основания последующего звена, причем основной и дополни55 тельный приводы перемещения звеньев размещены по разные стороны пластин, а кривошипы основной и дополнительной кинематических связей установлены соответственно на нечетных и четных пластинах, при этом первые кривошипы закреплены на
выходных валах двигателей, а каждый последующий кривошип шарнирно связан с шатунами, концы которых шарнирно установлены соответственно на последующем звене и на звене, на котором установлен предыдущий кривошип.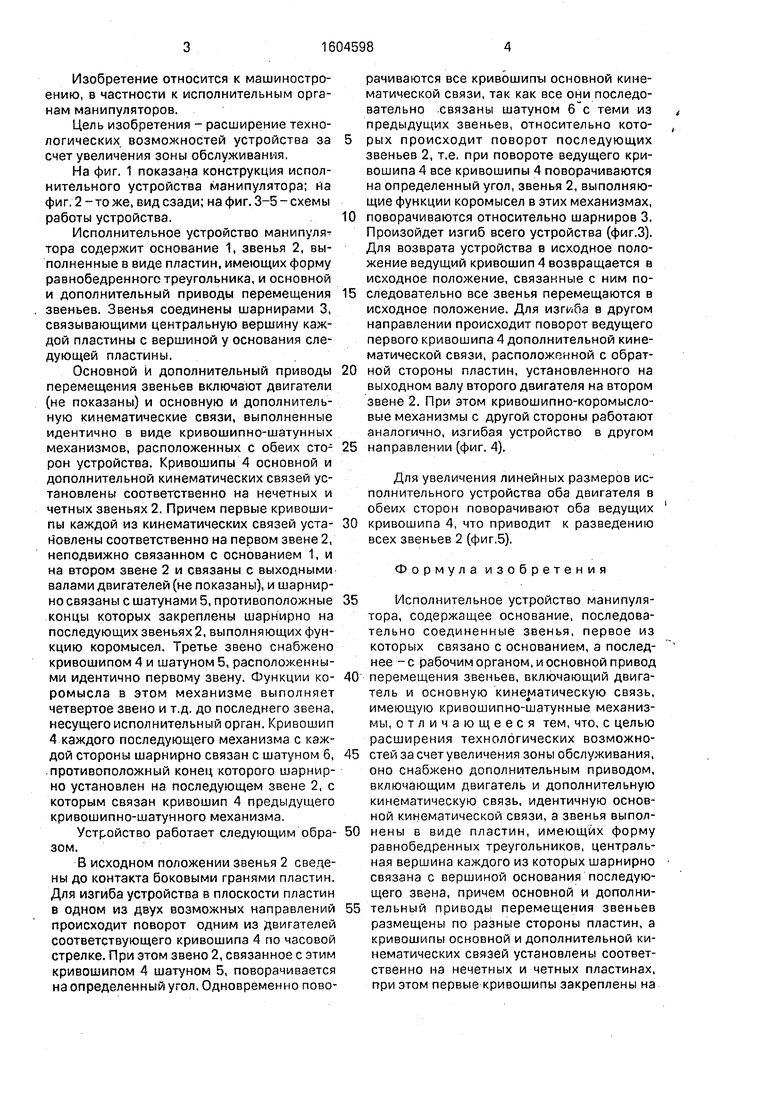
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| Исполнительный орган манипулятора | 1980 |
|
SU1097187A3 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
Изобретение относится к машиностроению, в частности к исполнительным органам манипуляторов. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания. Исполнительное устройство манипулятора состоит из основания и последовательно соединенных звеньев в виде пластин, имеющих форму равнобедренных треугольников, центральная вершина каждой пластины шарнирно связана с вершиной у основания последующего звена. Причем все звенья кинематически связаны между собой основной и дополнительной кинематическими связями в виде идентичных кривошипно-шатунных механизмов, расположенных по разные стороны от звеньев. Кривошипы 4 основной и дополнительной кинематических связей установлены соответственно на нечетных и четных звеньях и каждый из них связан с шатунами 6, закрепленными соответственно на последующем звене 2 и на звене, на котором установлен предыдущий кривошип соответствующей кинематической связи. Причем кривошипы, закрепленные на первом и втором звеньях 2, связаны с выходными валами двигателей. 5 ил.
РигМ
fw.3
ччч
иг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
