(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГЕНЕРАЦИИ РУКАВНОГО ФИЛЬТРА | 1991 |
|
RU2006262C1 |
| Устройство для регенерации рукавных фильтров | 1989 |
|
SU1607886A1 |
| Рукавный фильтр | 1980 |
|
SU929169A1 |
| Двухвалковая дробилка | 1979 |
|
SU902805A1 |
| Рукавный высокотемпературный фильтр | 1989 |
|
SU1681916A1 |
| Кривошипный пресс | 1984 |
|
SU1252190A1 |
| Дробильная установка пророщенного высушенного зерна | 2018 |
|
RU2692559C1 |
| Рукавный фильтр | 1981 |
|
SU1011190A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА АБРАЗИВНОЕ ИЗНАШИВАНИЕ | 2018 |
|
RU2691639C1 |
| Устройство для очистки газа от пыли | 1981 |
|
SU1001980A1 |
Изобретение касается очистки газов от пыли и может быть использовано на предприятиях по производству асбеста и в других отраслях промышленности. Цель изобретения - улучшение условий работы электродвигателя путем повышения использования кинетической энергии ведомого вала. Привод снабжен пальцем 8, установленным с возможностью поворота между ведомым шкивом 7 и эксцентриковым валом 6, подшипником 9, установленным на плече пальца 8, конусом 10 с пружиной, соединенным с подшипником 9 и соленоидом 13, на одном конце сердечника которого установлен конус 10 с пружиной, а на другом конце - упорной подшипник 14 с пружиной 15. 6 ил.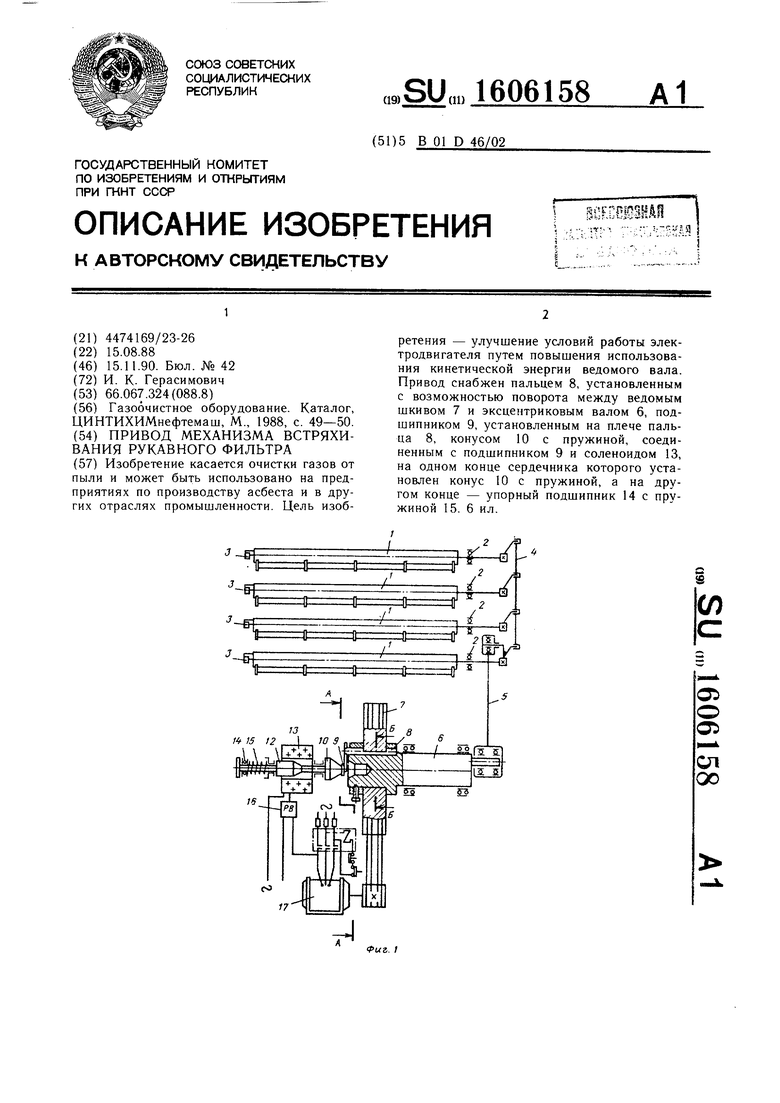
Oi
о
Oi СП
оо
Изобретение относится к очистке газов от пыли и может быть использовано на предприятиях по производству асбеста и в других отраслях промышленности.
Цель изобретения - улучшение условий работы электродвигателя путем повышения использования кинетической энергии ведомого шкива.
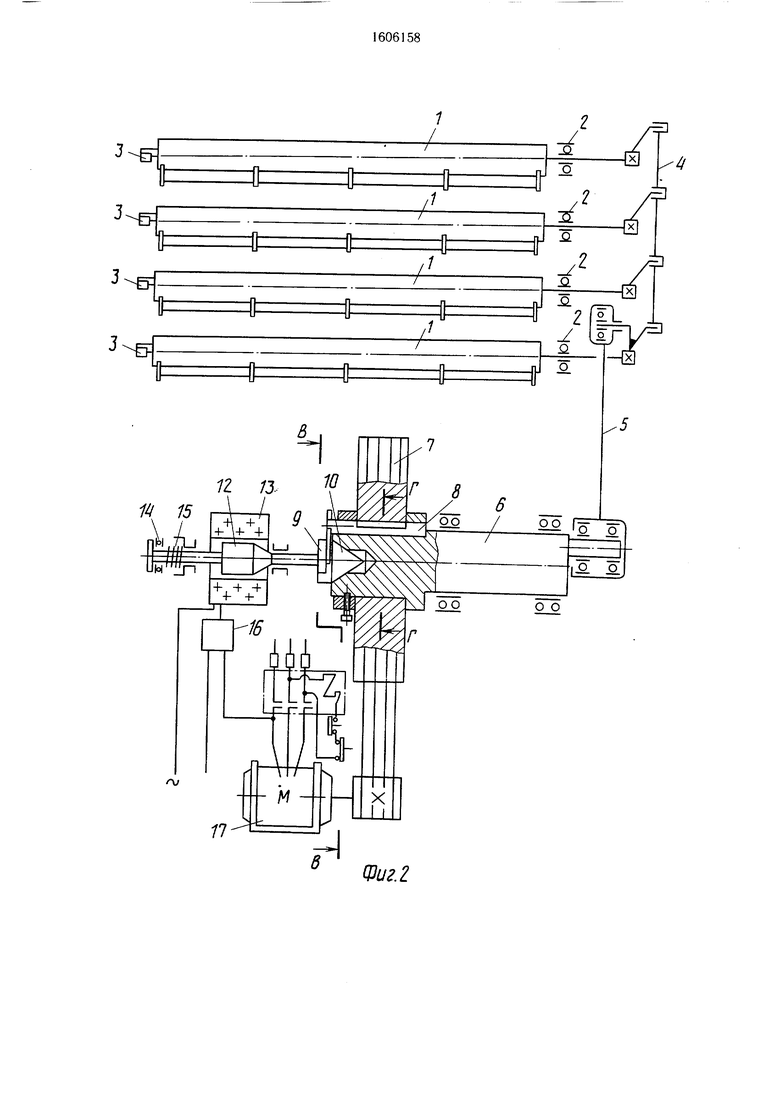
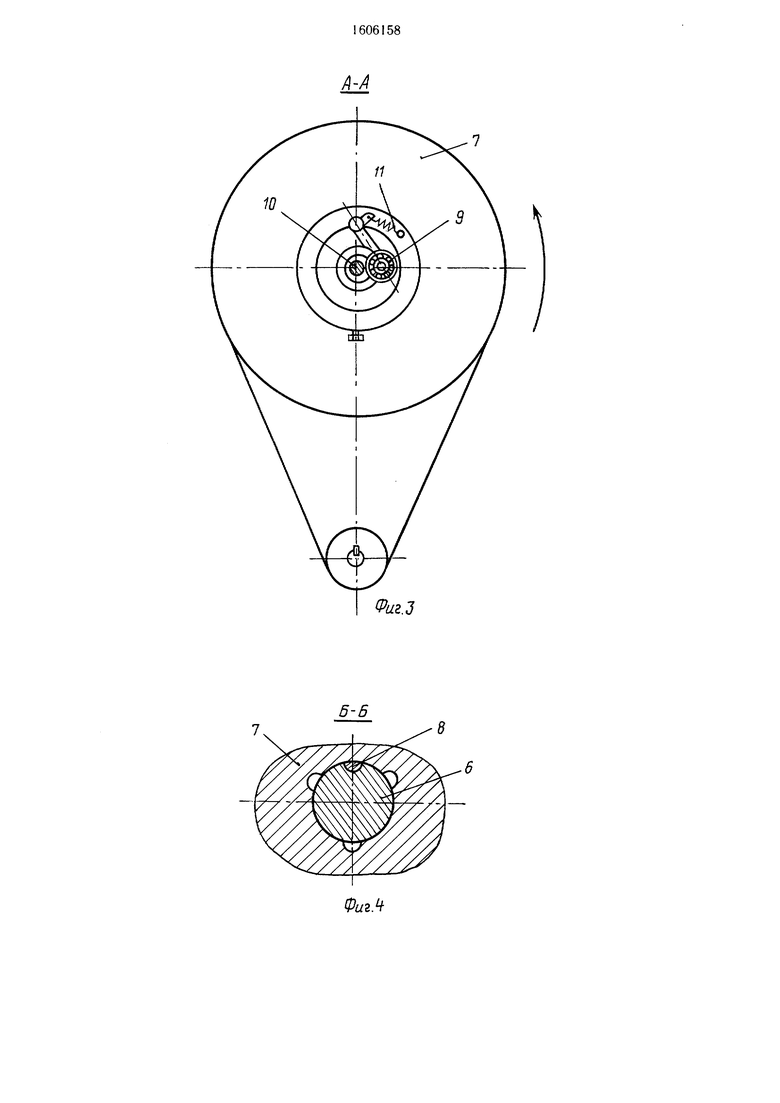
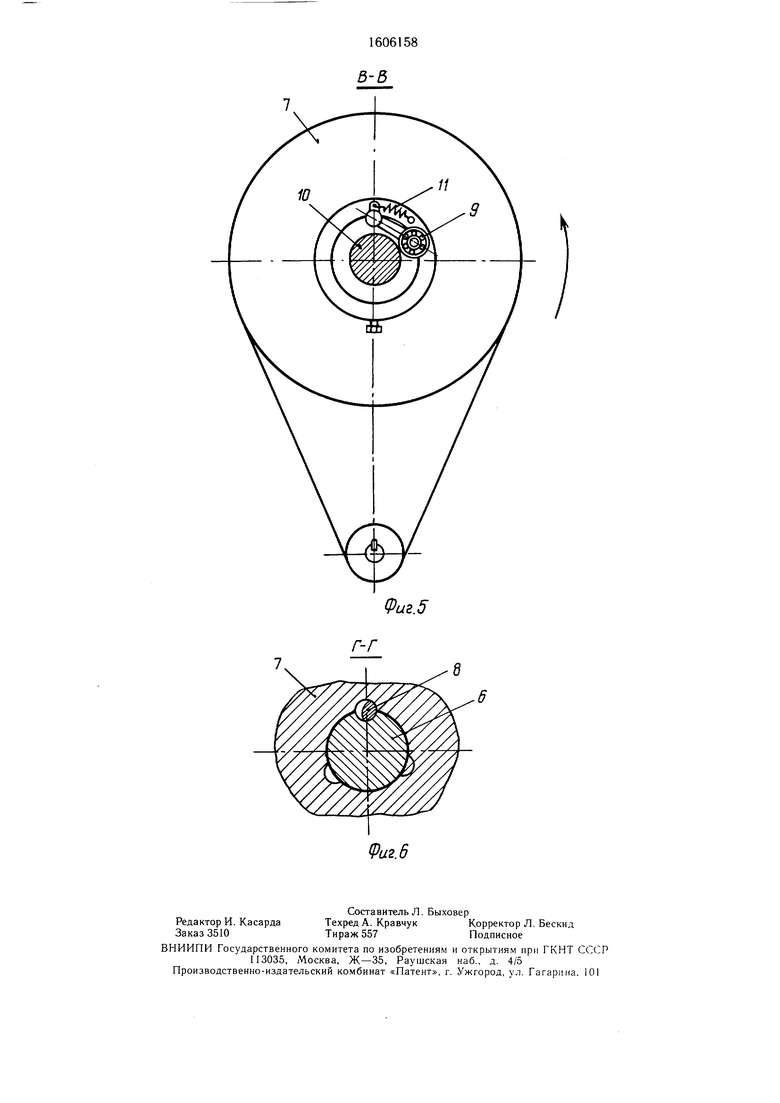
На фиг. 1 изображена кинематическая схема привода механизма встряхивания рукавного фильтра в момент, когда ведомый шкив его клиноременной передачи не имеет жесткой связи со своим валом; на фиг. 2 - кинематическая схема привода механизма встряхивания рукавного фильтра в момент, когда ведомый шкив его клиноременной передачи имеет жесткую связь со своим валом; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. 2.
Механизм встряхивания состоит из четырех качаюш,ихся рамок 1, на которых верхней частью крепятся фильтровальные рукава (не показаны). Каждая качающаяся рамка 1 с правой стороны крепится в подшипниках 2, а с левой стороны опирается в призматическую опору 3. Правый конец каждой качающейся рамки 1 соединен с системой качающихся тяг 4. Эта система тяг через шатун 5 соединена с эксцентриковым валом 6, на котором установлен ведомый шкив 7 клиноременной передачи. Между эксцентриковым валом 6 и ведомым шкивом 7 установлен палец 8, на левом конце которого жестко закреплен рычаг с подшипником 9. Последний постоянно соприкасается с конусом 10 ввиду поджатия его пружиной 11. Конус 10 на своей оси имеет сердечник 12 обмотки соленоида 13. Левая часть оси сердечника 12 имеет упор, который через упорный подшипник 14 соприкасается с пружиной 15. Электроцепь обмотки соленоида 13 замыкается через реле 16 времени, которое предназначено для включения электроцепи через установленное на нем время, после включения электродвигателя 17. Последний через ведущий шкив и клиноременную передачу имеет возможность передавать вращательное движение на ведомый шкив 7. Технологическое обоснование особенностей, относящихся к потере мощности привода механизма встряхивания, поясняется фиг. 1.
Механизм встряхивания рукавного фильтра работает следующим образом.
Приборы КИП и автоматики при достижении гидросопротивления на фильтровальных рукавах 1,5 ,015 кгс/см включают электродвигатель 17, который вращает ведомый щкив 7 клиноременной передачи в течение времени, установленного на реме 16 времени. Замыкается электроцепь обмотки
соленоида 13, в нее втягивается сердечник 12. При этом сжимается пружина 15, конус 10 входит в левый торец эксцентрикового вала 6. Это вызывает поворот
оси подшипника 9 против часовой стрелки относительно оси пальца 8 (фиг. 5). При этом пружина 11 обеспечивает постоянный контакт подшипника 9 с поверхностью конуса 10, а средняя часть пальца 8 занимает положение, показанное на фиг. 6. Кинематическая энергия с ведомого шкива 7 начинает передаваться на эксцентриковый вал 6. Максимальный отбор силы на встряхивание фильтровальных рукавов происходит, когда эксцентрик вала 6 занимает
крайние верхнее и нижнее положение.
В среднем положении эксцентрика вала 6 (между верхним и нижним) на встряхивание фильтровальные рукава не берут усилия с привода, оно тратится только на преодоление сил трения. Поэтому на время встряхивания фильтровальных рукавов в течение 1-2 мин работы механизма встряхивания снимается пульсирующая нагрузка по величине с электродвигателя. Эта нагрузка выравнивается за счет заранее накопленной кинетической энергии ведомого шкива 7 клиноременной передачи. Через 1 -2 мин встряхивания фильтровальных рукавов приборы КИП и автоматики отключают электродвигатель 17. Реле 16 времени разрывает электроцепь обмотки соленоида 13.
Пружина 15 выносит конус 10 из торца эксцентрикового вала 6. При этом пружина 11 поворачивает ось подшипника 9 по часовой стрелке относительно оси пальца 8 и между эксцентриковым валом 6 и ведомым шкивом 7 не будет жесткой связи (фиг. 3
и 4).
В дальнейшем цикл работы привода механизма встряхивания рукавного фильтра повторяется в указанной последовательности.
40
Формула изобретения
Привод механизма встряхивания рукавного фильтра, включающий электродвигатель с клиноременной передачей, ведомый шкив, соединенный с эксцентриковым валом,
систему плеч, связанных с качающимися рамами, на которых подвещены фильтровальные рукава, отличающийся тем, что,, с целью улучщения условий работы электродвигателя путем повышения использования кинетической энергии ведомого щкива,
привод снабжен пальцем, установленным с возможностью поворота между ведомым шкивом и эксцентриковым валом, подшипником, установленным на плече пальца, конусом с пружиной, соединенным с 1Тодшип- ником и соленоидом, на одном конце сер
дечника которого установлен конус с пружиной, а на другом конце - упор с пружиной.
--5
72 /J
1 15 - /
л/
77
/I
л
°
r 8
ii/ 00
oo
о о
O..
(Риг.З
Фиг.5
| Газобчистное оборудование | |||
| Каталог, ЦИНТИХИМнефтемаш, М., 1988, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
