Р
Ь/2+(,) )( 0,510ЙЦ)7; Ь/2-(х,-Хо)з-2((- ;)/()Д -0,51,,(Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования изделий из бетонных смесей | 1987 |
|
SU1604625A1 |
| Устройство для формования изделий из бетонных смесей | 1980 |
|
SU992205A1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА КУЛАЧКОВОГО МЕХАНИЗМА | 1990 |
|
RU2020334C1 |
| СПОСОБ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ ИЗДЕЛИЙ | 1992 |
|
RU2080238C1 |
| Способ поперечно-клиновой прокатки ступенчатых изделий | 1987 |
|
SU1593764A1 |
| СПОСОБ УПЛОТНЕНИЯ СМЕСЕЙ, ПРЕИМУЩЕСТВЕННО БЕТОННЫХ И АСФАЛЬТОБЕТОННЫХ | 1997 |
|
RU2119563C1 |
| Устройство для формования изделий из бетонных смесей | 1985 |
|
SU1278227A2 |
| Устройство для сварки с поперечными колебаниями сварочной горелки | 1988 |
|
SU1574396A1 |
| Бетоноукладчик | 1977 |
|
SU667402A1 |
| Способ точения некруглых в поперечном сечении тел | 1986 |
|
SU1364396A1 |
Изобретение относится к устройствам для формования строительных изделий путем силового деформирования бетонной смеси при раскатке ее в формы. Цель изобретения - повышение надежности в работе. Это достигается тем, что в устройстве привод 7 горизонтально-подвижной рамы 6 выполнен в виде шарнирно установленного на основании 1 кулачкового механизма, контактирующего с толкателями 8, а профиль кулачка определяют из уравнения @ ρ - радиус кулачка: B - расстояние между толкателями B=CONST), X0-X1 - координаты центра масс горизонтально-подвижной рамы в крайних положениях
φ - угловая координата. 2 ил.
р- радиус кулачка; b - расстояние между толкателями (b const); Xg,x - координаты центра масс горизонтальИзобретение относится к строительству, а именно к устройствам для формования строительных изделий путем силового деформирования бетонной смеси при раскатке ее в форме .
Цель изобретения - повышение надежности работы.
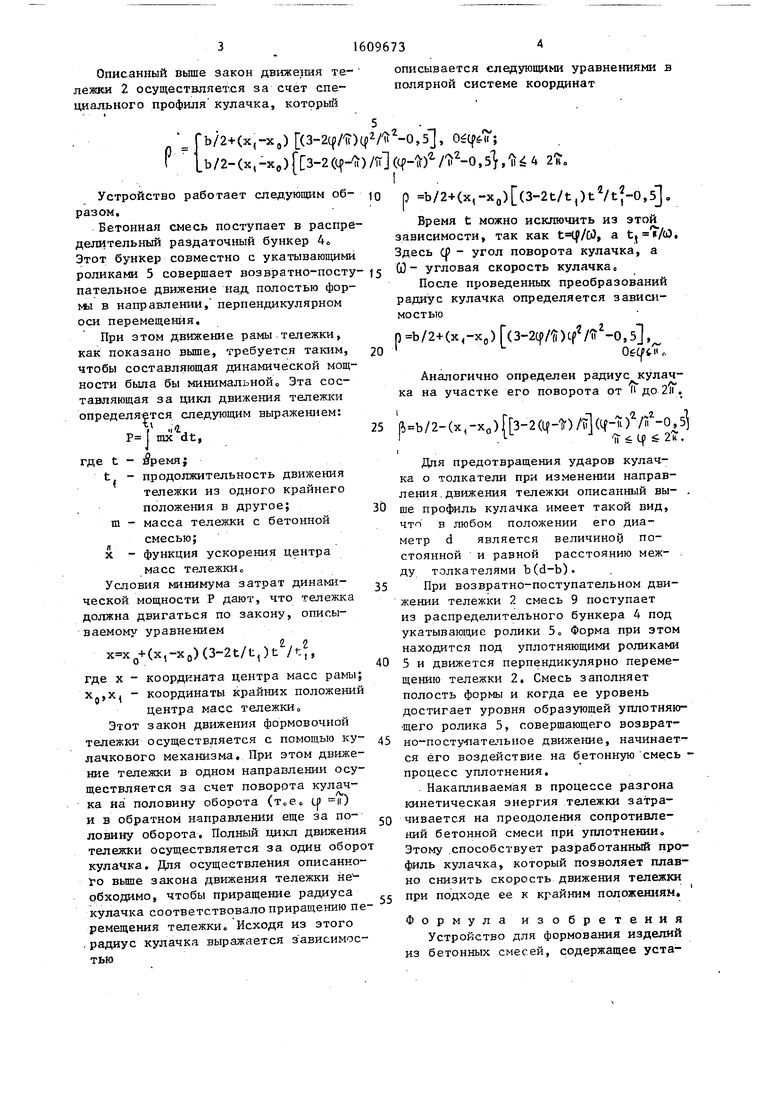
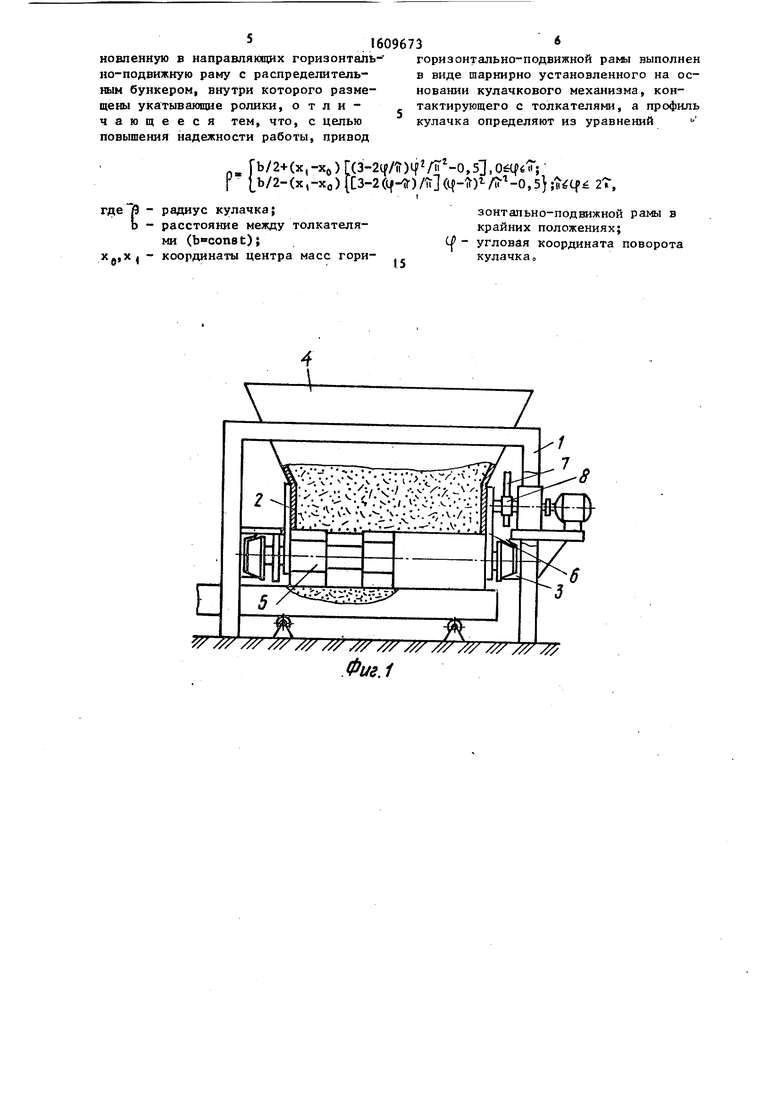
На фиг. 1 изображено устройство, общий вид; на .фиго 2 -.схема кулачка.
Устройство содержит смонтированную на неподвижном основании 1 формовочную тележку 2, которая совершает возвратно-поступательное движение, описываемое уравнением
но-подвижной рамы в крайних положе- .ниях; ср - угловая . 2 ил.
(Л
,-f-(x,-Xo)(3-2t/t,)tVt, . в направляющих 3 и содержащую распределительный бункер 4 и укатывающие ролики 5, соединенные с горизонтально-подвижной рамой 6. Тележка приво- . дится в движение при помонш привода 7, прикрепленного.к осноьат1ю I в виде кулачкового механизма, вращающего с постоянной угловой скоростью (G const) и контактирующего с двумя толкателями 8, жестко соединен- , ными с рамой тележки 2. Наличие двух толкателей 8 позволяет создавать жесткую силовую цепь при прямом и обратном ходе движе1шя тележки 2,
а
о Ф
CJ5
Описанный вьше закон движетая тележки 2 осуществляется за счет специального профиля кулачка, который
5 ГЬ/24-(х,-Хд) (3-2q)/ir)q),5,
г lb/2-(K,-x,)3-2()/1T().5
Устройство работает след,ующим об- разом.
Бетонная смесь поступает в распределительный раздаточный бункер 4о Этот бункер совместно с укатывающими роликами 5 совершает возвратно-посту- пательное движение над. полостью фор- Мз1 в направлении, перпендикулярном оси перемещения,
При этом движение рамы тележки, как показано выше требуется ташш, чтобы составляющая динамической мощности была бы минимальной Эта составляющая за цикл движения тележки определя-ется следующим выражением:
Р шх dt,
где t - ремя;
t - продолжительность движения тележки из одного крайнего положения в другое; ш - масса тележки с бетонной
смесью; X - функция ускорения центра
масс тележкио
Условия минимума затрат динами- ческой мощности Р дают, что тележка должна двигаться по закону, описываемому уравнением
(x,-xo)(3-2t/t,),
где к - координата центра масс рамы X ,х, - координаты крайних положений
центра масс тележки„ Этот закон движения формовочной тележки осуществляется с помощью ку- лачкового механизма. При этом движение тележки в одном направлении осуществляется за счет поворота кулачка Hai половину оборота ( ср ii) и в обратном направлении еще за по- ловину оборота. Полный цикл движени тележки осуществляется за один обор кулачка. Для осуществления описанно i o вьше закона движения тележки рбходимо, чтобы приращение радиуса кулачка соответствовало приращению п ремещения тележки. Исходя из этого . радиус кулачка выражается з ависимос тью
описывается следующими уравнениями в полярной системе координат
25
ю
tS
20
зО
5
45 Q т
55
р b/2+(x,-Xo)(3-2t/t,)tVtJ-0,5.
Время t можно исключить из этой зависимости, так как t4p/Ci), а tj ). Здесь (Р - угол поворота кулачка, а СО- угловая скорость кулачка
После проведенных преобразований радиус кулачка определяется зависимостью
(х,-Хв)Г(3-2(|)/ (|),5, OfC t n o
Аналогично определен радиус кулачЛч- -Л
ка на участке его поворота от и до 2li,
(X, -х„) 3-2() /ri(Cf- il ) I.I- If 2u,
1
Дпя предотвращения ударов кулачка о толкатели при изменении направления .движения тележки описанный вы- . ше профиль кулаЧка имеет такой вид, что в любом положении его диаметр d является величиноу постоянной и равной расстоянию между толкателями b(d-b).
При возвратно-поступательном движении тележки 2 смесь 9 поступает из распределительного бункера 4 под укатываю1цие ролики 5, Форма при этом находится под yплoтняющи И роликами 5 и движется перпендикулярно перемещению тележки 2, Смесь заполняет полость формы и когда ее уровень достигает уровня образующей уплотняющего ролика 5, совершающего возврат- но-посту-пательное движение, начинает- ся его воздействие на бетонную смесь - процесс уплотнения,
. Накапливаемая в процессе разгона кинетическая энергия тележки затрачивается на преодоления сопротивлений бетонной смеси при уплотнении. Этому .способствует разработанный профиль кулачка, который позволяет плавно снизить скорость движения тележки при подходе ее к крайним положениям,
Формулаизобретения
Устройство для формования изделий
из бетонных смесей, содержащее установпенную в направляющих горизонтально-подвижную раму с распределительным бункером, внутри которого размещены укатывающие ролики, отличающееся тем, что, с целью повышения надежности работы, привод
ГЬ/2+(х,-Хо)Г()1 А -0,53, Р tb/2-(x,-Xo)lC3-2(lf-)/()/u- -0, 2Г,
где
I:
- радиус кулачка;
расстояние между толкателями (baconst); х.,Х( - координаты центра масс гори i; -о:хлПТ 7сЗ : ;
. .j.. л, v -/ -.vV-v v , ч А . . .-;- ... -./.v-...:;x.-.4
// /// /// /// //у / /У /// /// /// /// уг/
Фиг,1
горизонтально-подвижной рамы выполнен в виде шарнирно установленного на основании кулачкового механизма, контактирующего с толкателями, а профиль кулачка определяют из уравнений
зонтально-подвижной рамы в крайних положениях; Ср - угловая координата поворота кулачка
Фиг. 2
| Приспособление для указания остановок в трамваях | 1916 |
|
SU1212A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
