средством шарнирно. закрепленного между Ними промежуточного звена. Опоры 9 линей- Ных С 6 базовой балки 5 жестко закреплены На С 6 и установлены с возможностью взаи- Модействия с опорными боковыми поверх- Ьостями С 1, 2 крепи. Управление крепью
в плоскости пласта осуществляется за счет того, что положение базовой балки 5 определяется удерживающим устройством 8, копирующим положение вентиляционного штрека. 14 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для крутых пластов | 1983 |
|
SU1116168A1 |
| Устройство для прямолинейного перемещения базы крепи | 1982 |
|
SU1116171A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1992 |
|
RU2065059C1 |
| СПОСОБ УПРАВЛЕНИЯ КРЕПЬЮ В ПЛОСКОСТИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090756C1 |
| КОМПЛЕКС ДЛЯ НАКЛОННЫХ И КРУТЫХ ПЛАСТОВ КДК ДОЛИНСКОГО, СТАВ КОНВЕЙЕРА, СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСА | 2004 |
|
RU2276729C1 |
| Прицепное устройство базовой балки механизированной крепи | 1988 |
|
SU1610038A1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Секция механизированной крепи | 1977 |
|
SU765508A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1995 |
|
RU2078938C1 |
Изобретение относится к механизации очистных работ на крутых пластах при подземной добыче угля. Цель - повышение эффективности управления крепью в плоскости пласта. Механизированная крепь включает линейную 1 и концевую 2 секции (С), базовую балку 5, с которой связаны С 1, 2 гидроцилиндрами (ГЦ) 14 передвижки. Каждая С 1 имеет гидравлическую опору, например гидродомкрат 18. При этом последний имеет гидрозамок и связан с напорной магистралью с возможностью подачи в него рабочей жидкости одновременно с подачей рабочей жидкости в рабочую полость вышерасположенного ГЦ 14 передвижки. С базовой балкой 5 ГЦ 14 передвижки связан посредством шарнирно закрепленного между ними промежуточного звена. Опоры 9 линейных С 6 с базовой балки 5 жестко закреплены на С 6 и установлены с возможностью взаимодействия с опорными боковыми поверхностями С 1, 2 крепи. Управление крепью в плоскости пласта осуществляется за счет того, что положение базовой балки 5 определяется удерживающим устройством 8, копирующим положение вентиляционного штрека. 14 ил.
Изобретение относится к горному делу,
именно к механизации очистных работ а крутых пластах при подземной добыче тля.
Целью изобретения является повышение ффективности управления крепью в плоскости пласта.
На фиг. 1 изображена крепь, общий вид,
сверху; на фиг. 2 - разрез А-А на
иг. 1; на фиг. 3 - узел I на фиг. 1; на
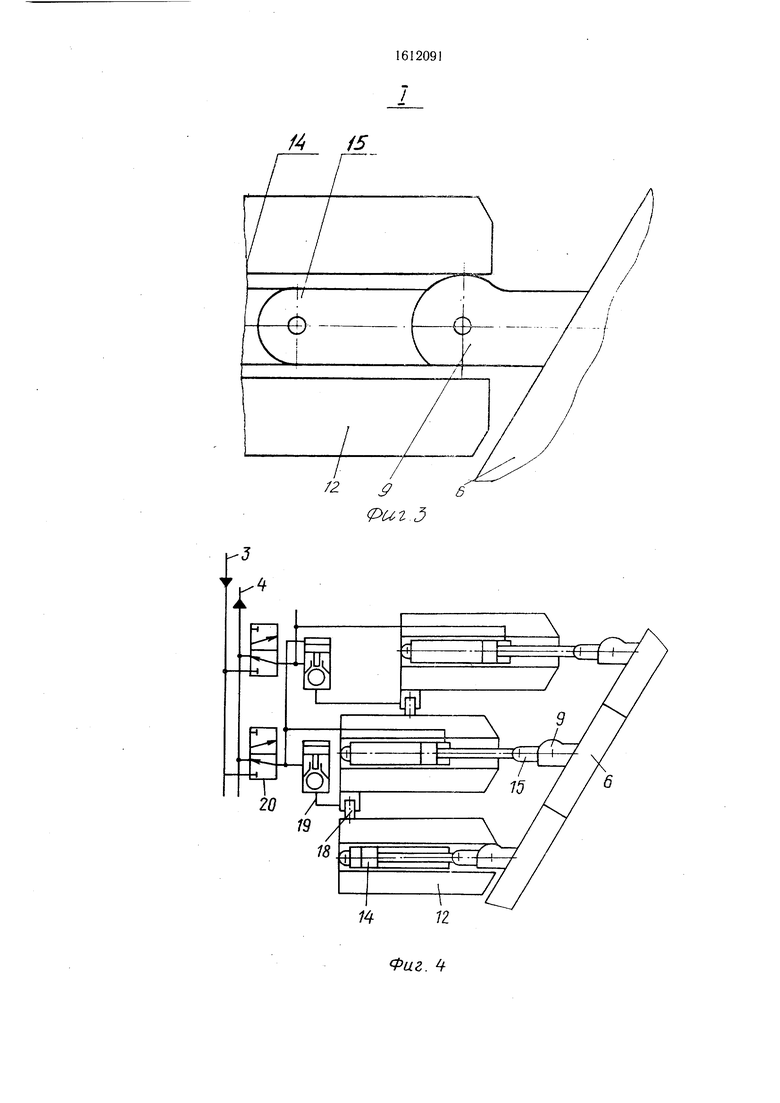
иг. 4 - схема подключения гидродомкраов и гидроцилиндров к гидромагистралям;
jia фиг. 5 и 6 - выравнивание положения
|;екций при сползании одной из них; на
фиг. 7 и 8 - положение крепи после подъема
базовой балки; на фиг. 9-11 - то же, после
Опускания базовой балки; на фиг. 12-14 -
}о же, после искривления базовой балки и ее
выравнивания.
Механизированная крепь состоит из ли- кейной 1 и концевой 2 секций, гидромагист- )алей напорной 3 и сливной 4, базовой бал- и 5, включающей линейные 6 и концевую 7 :екции (рештаки). Концевым рештаком 7 зазовая балка 5 связана с устройством 8 удержания базовой балки от сползания по радению пласта (удерживающим устройством), расположенным на вентиляционном штреке.
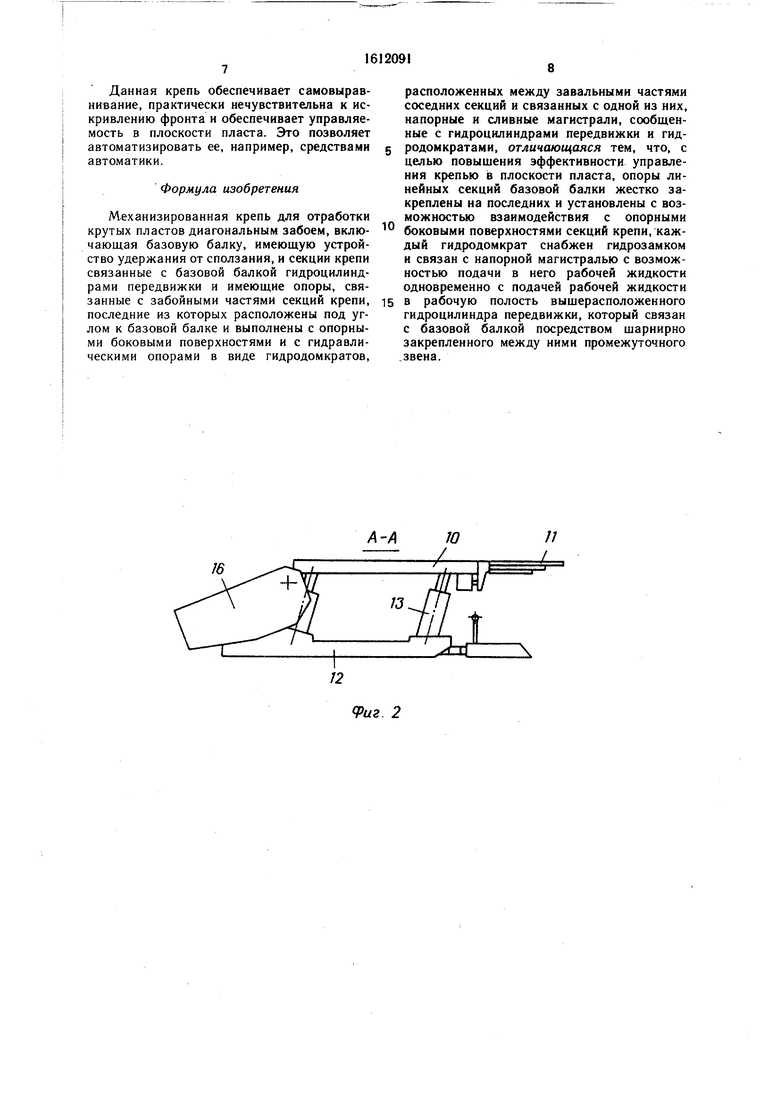
Каждый линейный рештак 6 базовой |балки 5 снабжен жестко связанной с ним опорой 9, с которой взаимодействует в конце перемещения боковой опорной поверхностью забойной части соответствующая линейная секция крепи 1. Площадь контакта в месте взаимодействия во избежание внесения случайных ошибок в угловое положение секции должна быть минимальной. Для выполнения этого требования поверхность опоры 9 выполнена, например, в виде дуги окружности, что обеспечивает контакт между опорой 9 и боковой поверхностью забойной части секции крепи 1 по линии.
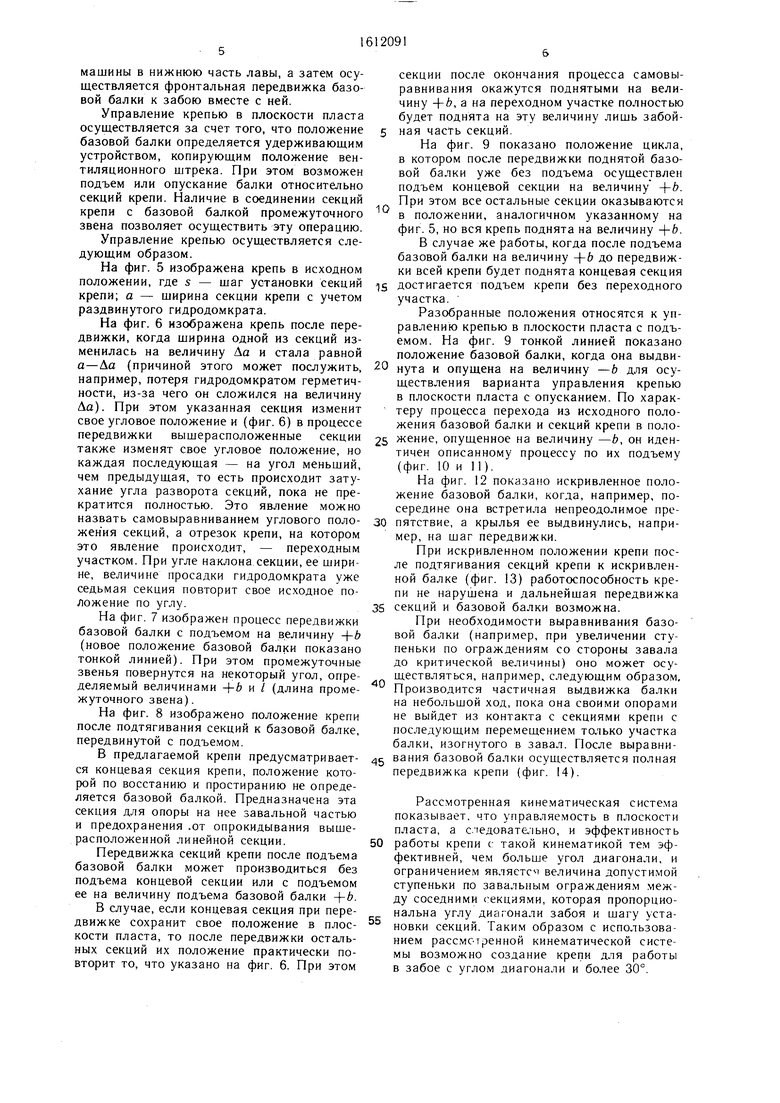
Секция крепи (фиг. 2) состоит из верхнего перекрытия 10 с поджимной консолью 11, основания 12, гидростоек 13, гидроци- лг идра 14 передвижки, который расположен внутри или сбоку секции крепи, промежуточного звена 15, связанного шарнирно с базовой балкой 5 и гидроцилиндром.. 14 передвижки, завального ограждения 16. При необходимости, для устранения за5
зоров со стороны выработанного пространства завальное ограждение 16 может
быть снабжено выдвижной щекой 17 и гидродомкратом для ее перемещения.
Каждая секция 1 снабжена гидравлической опорой, например гидродомкратом 18, снабженным гидрозамком 19, причем гид0 родомкрат установлен в завальной части секции. С помощью гидродомкратов 18 осуществляется опора секций друг на друга по их завальным частям. Роль этой межсекционной связи при установке выдвижной щеки 17 может выполнить гидродомкрат ее
5 перемещения.
Каждая секция крепи снабжена гидроблоком 20 для управления гидроцилиндром 14 передвижки и гидродомкратом 18.
Использование механизированной крепи предусматривается в комплексе с выемочной машиной 21, кинематически связанной с базовой балкой 5.
Работа механизированной крепи осуществляется следующим образом.
Исходное положение крепи - базовая балка придвинута к забою, выемочная машина находится у откаточного щтрека, секции крепи отстоят от базовой балки на шаг передвижки, кровля у забоя подхвачена консолями верхних перекрытий.
0 По мере снятия полоски угля снизу вверх, вслед за выемочной машиной перемещаются поочередно секции крепи. При этом завальная их часть опирается на нижерасположенную секцию при помощи гидродомкрата, связанного с напорной магистралью, а гид5 родомкрат между передвигаемой и вышерасположенной секциями крепи соединен со сливом (фиг. 4). В конце перемещения каждая секция крепи опирается без зазора на опору, установленную на соответствующем рещтаке базовой балки, а гидродомкрат опоры - на нижерасположенную секцию, полностью раздвинут и заперт гидрозамком. Такая базировка секций на балку обеспечивает параллельную стыковку секций крепи и лищена недостатков, присущих по5 следовательной стыковке, что подтверждается кинематической системой предлагаемой крепи (фиг. 5-14).
После снятия полоски угля и передвижки секций крепи производится спуск выемочной
машины в нижнюю часть лавы, а затем осуществляется фронтальная передвижка базовой балки к забою вместе с ней.
Управление крепью в плоскости пласта осуществляется за счет того, что положение базовой балки определяется удерживающим устройством, копирующим положение вентиляционного штрека. При этом возможен подъем или опускание балки относительно секций крепи. Наличие в соединении секций крепи с базовой балкой промежуточного звена позволяет осуществить эту операцию.
Управление крепью осуществляется следующим образом.
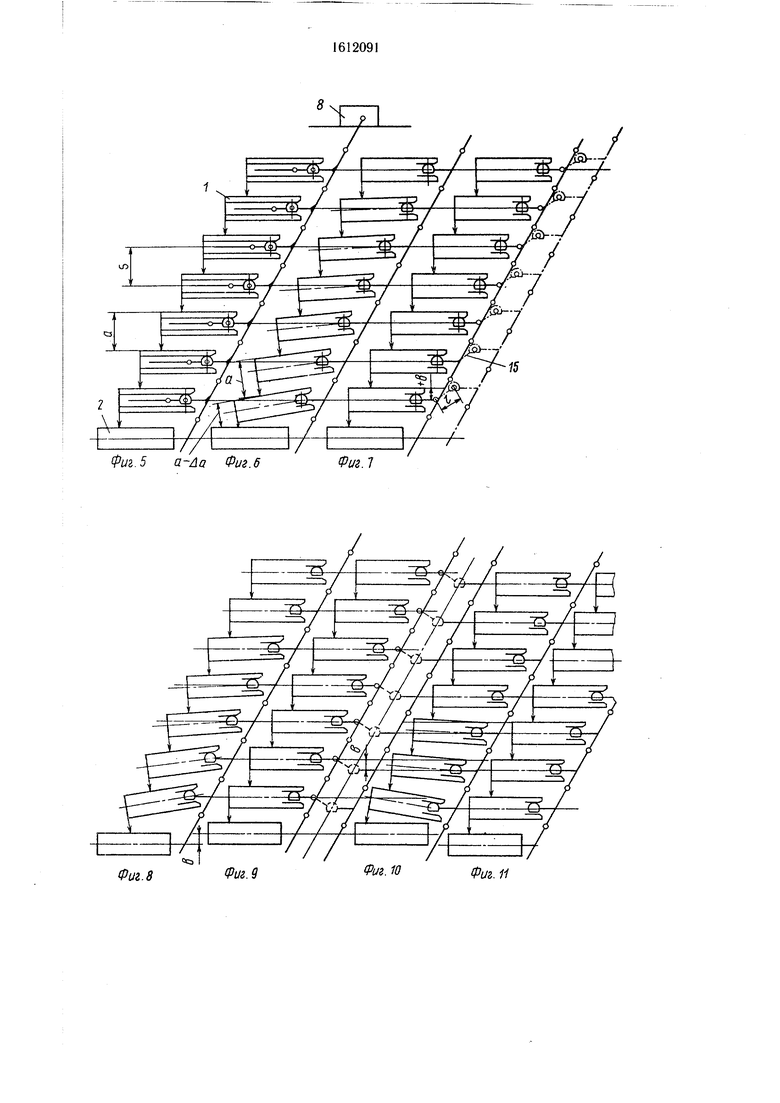
На фиг. 5 изображена крепь в исходном положении, где s - шаг установки секций крепи; а - ширина секции крепи с учетом раздвинутого гидродомкрата.
На фиг. 6 изображена крепь после передвижки, когда ширина одной из секций изменилась на величину Да и стала равной а-Да (причиной этого может послужить, например, потеря гидродомкратом герметичности, из-за чего он сложился на величину Ла). При этом указанная секция изменит свое угловое положение и (фиг. 6) в процессе передвижки вышерасположенные секции также изменят свое угловое положение, но каждая последующая - на угол меньший, чем предыдущая, то есть происходит затухание угла разворота секций, пока не прекратится полностью. Это явление можно назвать самовыравниванием углового поло- жен ия секций, а отрезок крепи, на котором это явление происходит, - переходным участком. При угле наклона секции, ее ширине, величине просадки гидродомкрата уже седьмая секция повторит свое исходное положение по углу.
На фиг. 7 изображен процесс передвижки базовой балки с подъемом на величину +6 (новое положение базовой балки показано тонкой линией). При этом промежуточные звенья повернутся на некоторый угол, определяемый величинами +Ь и / (длина промежуточного звена).
На фиг. 8 изображено положение крепи после подтягивания секций к базовой балке, передвинутой с подъемом.
В предлагаемой крепи предусматривается концевая секция крепи, положение которой по восстанию и простиранию не определяется базовой балкой. Предназначена эта секция для опоры на нее завальной частью и предохранения .от опрокидывания вышерасположенной линейной секции.
Передвижка секций крепи после подъема базовой балки может производиться без подъема концевой секции или с подъемом ее на величину подъема базовой балки . В случае, если концевая секция при передвижке сохранит свое положение в плоскости пласта, то после передвижки остальных секций их положение практически повторит то, что указано на фиг. 6. При этом
секции после окончания процесса самовыравнивания окажутся поднятыми на величину , а на переходном участке полностью будет поднята на эту величину лишь забой- 5 ная часть секций.
На фиг. 9 показано положение цикла, в котором после передвижки поднятой базовой балки уже без подъема осуществлен подъем концевой секции на величину +/.
При этом все остальные секции оказываются 0
в положении, аналогичном указанному на
фиг. 5, но вся крепь поднята на величину . В случае же работы, когда после подъема базовой балки на величину до передвижки всей крепи будет поднята концевая секция
S достигается подъем крепи без переходного участка.
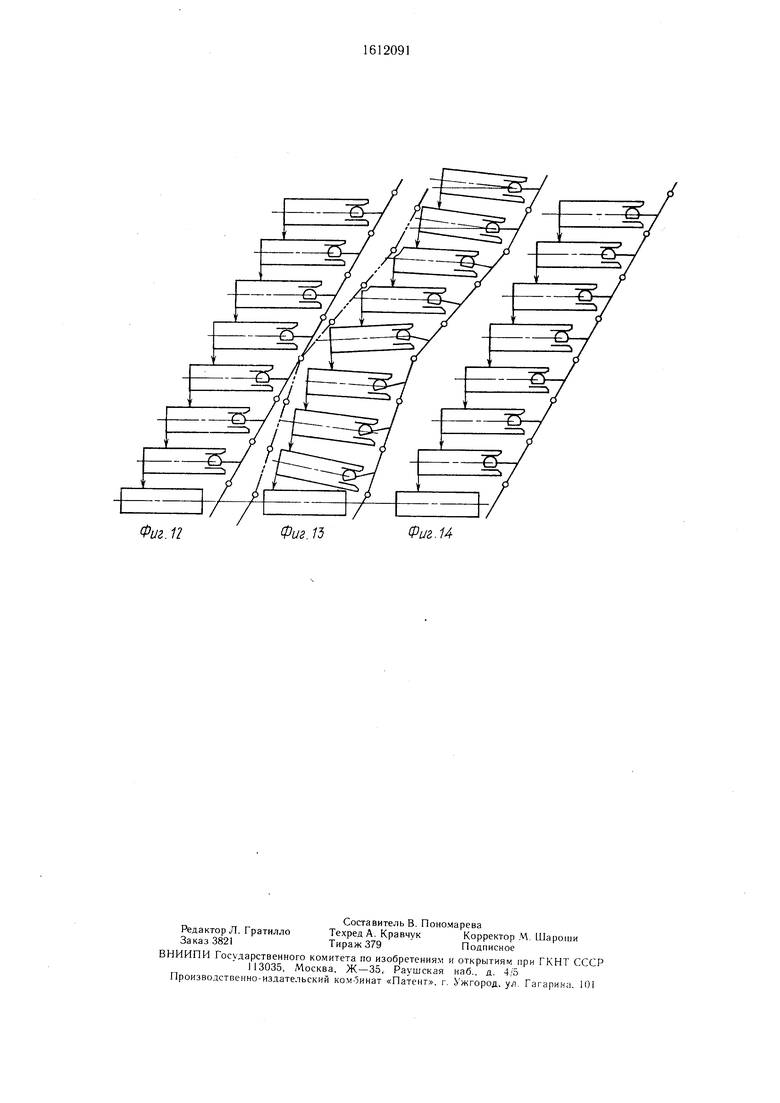
Разобранные положения относятся к управлению крепью в плоскости пласта с подъемом. На фиг. 9 тонкой линией показано положение базовой балки, когда она выдви0 нута и опущена на величину -b для осуществления варианта управления крепью в плоскости пласта с опусканием. По характеру процесса перехода из исходного положения базовой балки и секций крепи в поло5 жение, опущенное на величину -Ь, он идентичен описанному процессу по их подъему (фиг. 10 и 11).
На фиг. 12 показано искривленное положение базовой балки, когда, например, посередине она встретила непреодолимое пре0 пятствие, а крылья ее выдвинулись, например, на шаг передвижки.
При искривленном положении крепи после подтягивания секций крепи к искривленной балке (фиг. 13) работоспособность крепи не нарушена и дальнейшая передвижка
5 секций и базовой балки возможна.
При необходимости выравнивания базовой балки (например, при увеличении ступеньки по ограждениям со стороны завала до критической величины) оно может осу- шествляться, например, следующим образом. Производится частичная выдвижка балки на небольшой ход, пока она своими опорами не выйдет из контакта с секциями крепи с последующим перемещением татько участка балки, изогнутого в завал. После выравни5 вания базовой балки осуществляется полная передвижка крепи (фиг. 14).
Рассмотренная кинематическая систе.ма показывает, что управляемость в плоскости пласта, а с. 1едовате. 1ьно, и эффективность 0 работы крепи с такой кинематикой тем эффективней, чем больше угол диагонали, и ограничением является величина допустимой ступеньки по завальным ограждениям между соседними секциями, которая пропорциональна углу диагонали забоя и шагу установки секций. Таким образом с использованием рассмотренной кинематической системы возможно создание крепи для работы в забое с углом диагонали и более 30°.
Данная крепь обеспечивает самовыравнивание, практически нечувствительна к искривлению фронта н обеспечивает управляемость в плоскости пласта. Это позволяет автоматизировать ее, например, средствами автоматики.
Формула изобретения
Механизированная крепь для отработки крутых пластов диагональным забоем, включающая базовую балку, имеющую устройство удержания от сползания, и секции крепи связанные с базовой балкой гидроцилиндрами передвижки и имеющие опоры, связанные с забойными частями секций крепи, последние из которых расположены под углом к базовой балке и выполнены с опорными боковыми поверхностями и с гидравлическими опорами в виде гидродомкратов.
расположенных между завальными частями соседних секций и связанных с одной из них, напорные и сливные магистрали, сообщенные с гидроцилиндрами передвижки и гидродомкратами, отличающаяся тем, что, с целью повыщекия эффективности управления крепью в плоскости пласта, опоры линейных секций базовой балки жестко закреплены на последних и установлены с возможностью взаимодействия с опорными боковыми поверхностями секций крепи, каждый гидродомкрат снабжен гидрозамком и связан с напорной магистралью с возможностью подачи в него рабочей жидкости одновременно с подачей рабочей жидкости в рабочую полость выщерасположекного гидроцилиндра передвижки, который связан с базовой балкой посредством шарнирно закрепленного между ними промежуточного .звена.
А-А
Ю
//
td
(риг 2
14 15
7
6
п
72
Фиг.
Фиг. 5 Фиг.6
ФигЛ
Фиг. 8
Фиг. 9
Фиг. 10
Фиг. 11
Фиг. 12
Фиг. 15
Фиг. 14
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ И НАКЛОННЫХ ПЛАСТОВ | 0 |
|
SU178330A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Комплексная механизация и автоматизация очистных работ в угольных luaxTax | |||
| / Под ред | |||
| Б | |||
| Ф | |||
| Братченко | |||
| Глюкауф, 1984, № 3, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Механизированная крепь для крутых пластов | 1980 |
|
SU949196A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выемочный комплекс для крутых пластов | 1980 |
|
SU1021787A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
