Фиг./
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.
Цель изобретения - повьпиенне за счет обеспечения стабильного положения ведомого шпинделя относительно ведущего, пов1 П11енпе производительности за счет обеспечения быстрой настройки на заданное межосевое расстояние и уменьгиение габаритов устройства.
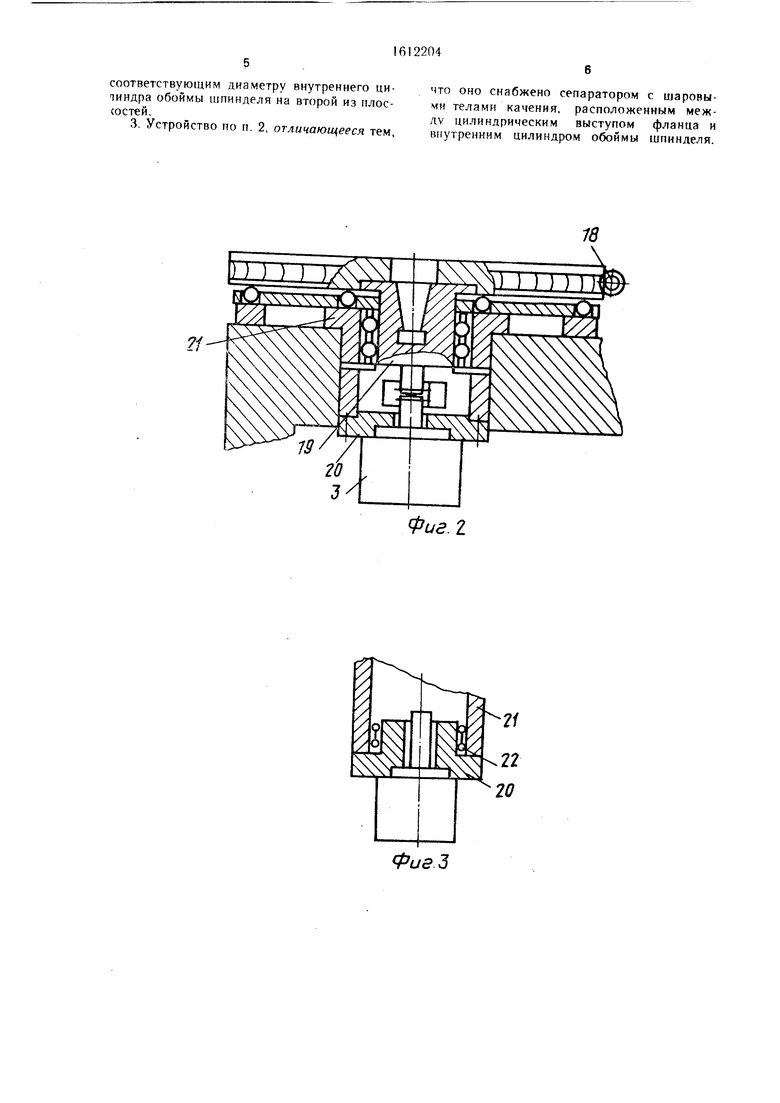
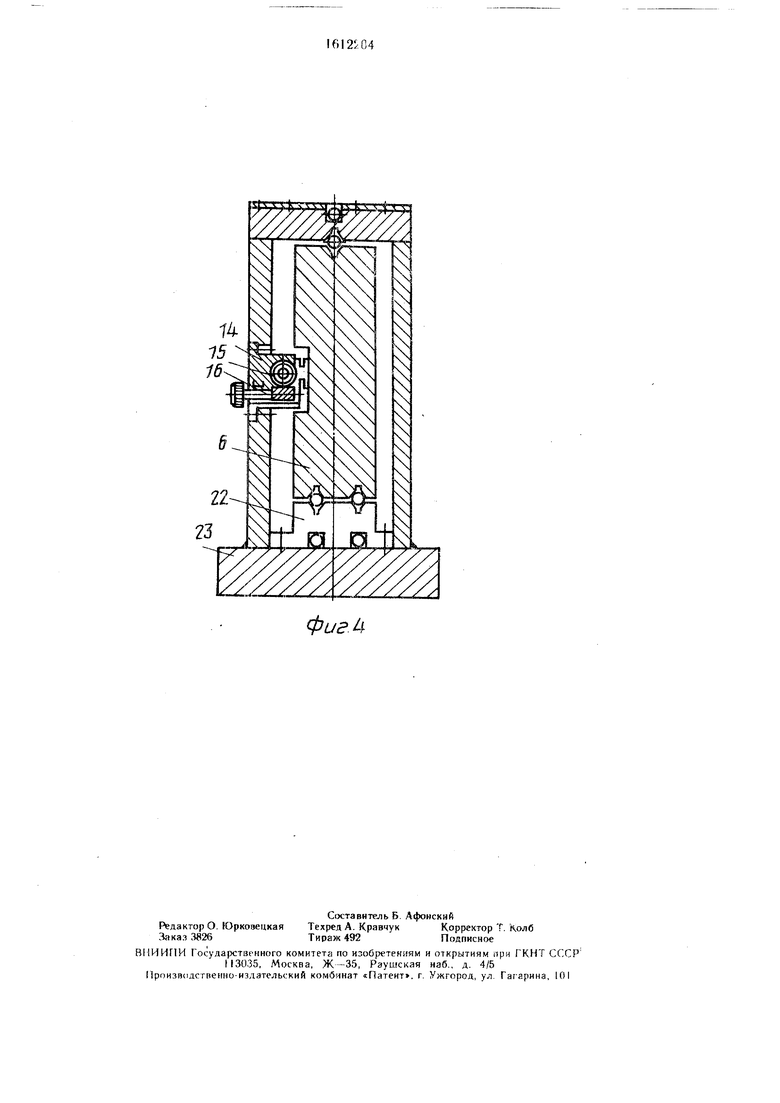
На фиг. 1 изображена конструктивная схема устройства; на фиг. 2 - основание с ведущим шпинделем; ка фиг. 3 - вариант крепления углового преобразователя ведущего шпинделя; на фиг. 4 - стойка с траверсой.
Устройство состоит из основания (фиг. 1), на котором смонтирован стол-шпиндель 2, муфтой соединенный с угловым фотоэлектрическим преобразователем 3 (фиг. 2). На столе устанавливается измеряемое зубчатое колесо 4 {фиг. 1}, рядом со столом на основании I смонтирована стойка 5 траверсы, в которой на направляющих (фиг. 4) установлена траверса б (фиг. 1), на которой закреплен ведомый шпикдель 7, связанный муфтой с угловым фотоэлектрическим преобразователем 8. На шпинделе 7 крепится эталонное (измерительное) колесо 9. На траверсе 6 установлены ходовой винт 10, связанный через муфту с электродвигателем И, и линейки 12 измерения линейных перемещений. На стойке траверсы б установлен датчик 13 линейных перемеш.ений и корпус-вилка И (фиг. 4), вилка которого охватывает ХОДОВУЮ гайку 15, по внешнему цилиндру которой нарезано червячное колесо, а в са- ыом корпусе установлен червяк 16. Датчик 13 электрически связан с блоком 17 цифровой индикации, а фотоэлектрические преобразователи 3 и 8 электрически связаны с блоком обработки информации (не показан).
Стол 2 имеет по наружному периметру или на уступе нарезанный червячный венец,- который находится в зацеплении с червяком 8, связанным с приводом стола. Собственно стол жестко связан со шпинделем 19, который муфтой связагг с угловым преобразователем 3, закрепленным на фланце 20, который привинчен к торцу обоймы 21 шпинделя 9. Позициями 22 и 23 обозначены направляющая траверсы и стойка траверсы соответственно (фиг. 4).
Устройство работает следующим образом.
Стол 2 (фиг. 2) получает вращательное движение от червяка 18 после включения пг-ивода. При этом за счет муфты приводится р:.: гфащеыие ппиндель углового фотоэлект- р1:чсскг.гг преобразователя 3, а измеряемое кс.,;:со 4 (фкг. 1), жестко закрепленное на стиле, привсдкт во вращение нахо.аящееся с ним в зубчатом зацеплении зталонное колесо 9, соедннекное с ве.юмым шпинае
0
5
0
0
5
0
ij
лем 7, который муфтой связан с фотоэлектрическим преобразователем 8. При этом с фотоэлектрических преобразователей идут сигналы на блок обработки информации. Рассогласование угловой скорости угловых преобразователей, позппкающее из-за кинематической погрешности измеряемой зубчаток передачи (колеса 4 и 9), фиксируется блоком обработки.
Быстрая (грубая) настройка прибора на номинальное ne,x :;i-f зое расстояние измеряемого 4 и измерительного 9 колес (фиг. 1) производится включением электродвигателя 51, который через муфту приводит во вра- а1ение ходовой винт 10, подюипники которо- го ifcecTKO закрлъчены на траверсе 6. Винт, ввинчиваясь в ходовую гайку 15, находящуюся в корпусе-вилке 14, закрепленном на стойке 23, быстро передвигает траверсу 6 с установленным на ней ведомым шпинделем с -измерительным колесом. При этом датчик 13 измерения линейных перемещений, отсчитывает по линейке 12 величину перемещения и выдает сигнал о величине перемещения ка блок 17. Когда измерительное колесо подходит к заданной величине межосевого расстояния, электродвигатель выключают и оператор приводит в вращение червяк 16 (фиг. 4). который связан с червячным колесом, Hape3af HbiM по наружному цилиндру гайки 15. Гайка 15, вращаясь от червяка, обеспечивает точную подачу траверсы по блоку 17 цифровой индикации на заданное межосевое расстояние.
Формула изобретения
. Устройство для контроля кинематической погрешности цилиндрических зубчатых колес, содержащее основание, расположенные на гем ведущий и ведомый шпиндели с обоймами, стойку с направляющими и электропривод ведущего шпинделя, угловые преобразователи с выходными валами, кинематически связанные муфтами с ведущим и ведомым шпинделем и электрически с блоком обработки ин(| ормацяи, отличающееся тем, что, с целью повышения точности, производительности контроля и уменьшения габаритов устройства, ведущий шпиндель выполнен в виде поворотного стола, стойка жестко закреплена на основании, а устройство снабжено тра 5ерсой с приводом, на одном из концов которой закреплен ведомый шпиндель.
2. Устройство по п. 1, отличающееся тем, что, с целью попьппения ремонтопригодности и снижения трудоемкости монтажа, онс снабжено, фланцем, выпо.чиегнным в виде диска с цилиндрической выточке на одной из плоскостей с диамет)ом, со- тветствующим диаметру центрирующего цилиндра углового преобразователя, и с цилин.).1ическим выступом.
соответствующим диаметру внутреннего ци- 1индра обоймы шпинделя на второй из плоскостей.
3. Устройство по п. 2, отличающееся тем,
6
что оно снабжено сепаратором с шаровыми телами качения, расположенным между цилиндрическим выступом фланца и внутренним цилиндром обоймы шпинделя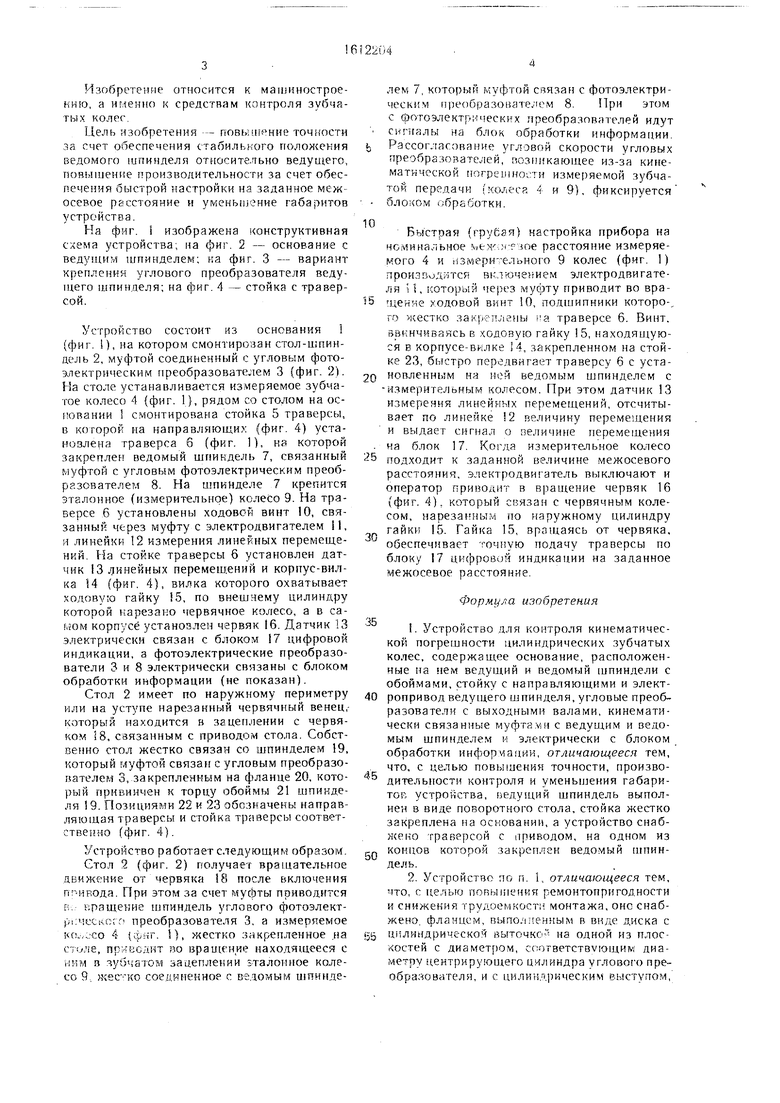
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089845C1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| УСТРОЙСТВО К ТОКАРНОМУ СТАНКУ ДЛЯ НАРЕЗАНИЯ ГЛОБОИДНЫХ ЧЕРВЯКОВ | 1996 |
|
RU2101139C1 |
| Устройство для поворота и фиксации бабки изделия | 1982 |
|
SU1047669A1 |
| Внутридоводочный станок | 1981 |
|
SU967780A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 2000 |
|
RU2171742C1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Роликовый конвейер для продольного перемещения и вращения длинномерных цилиндрических изделий | 1986 |
|
SU1456336A1 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес. Цель изобретения - повышение точности за счет обеспечения стабильного положения ведомого шпинделя относительно ведущего, повышение производительности за счет обеспечения быстрой настройки на заданное межосевое расстояние и уменьшение габаритов устройства. Это достигается тем, что контролируемое колесо базируется на столе-шпинделе 2. Измерительное колесо 9 устанавливается на ведомом шпинделе 7 с возможностью перемещения на траверсе 6 параллельно плоскости основания 1. Настройка на межосевое расстояние осуществляется от двигателя (грубо) и вручную (точно). 2 з.п. ф-лы, 4 ил.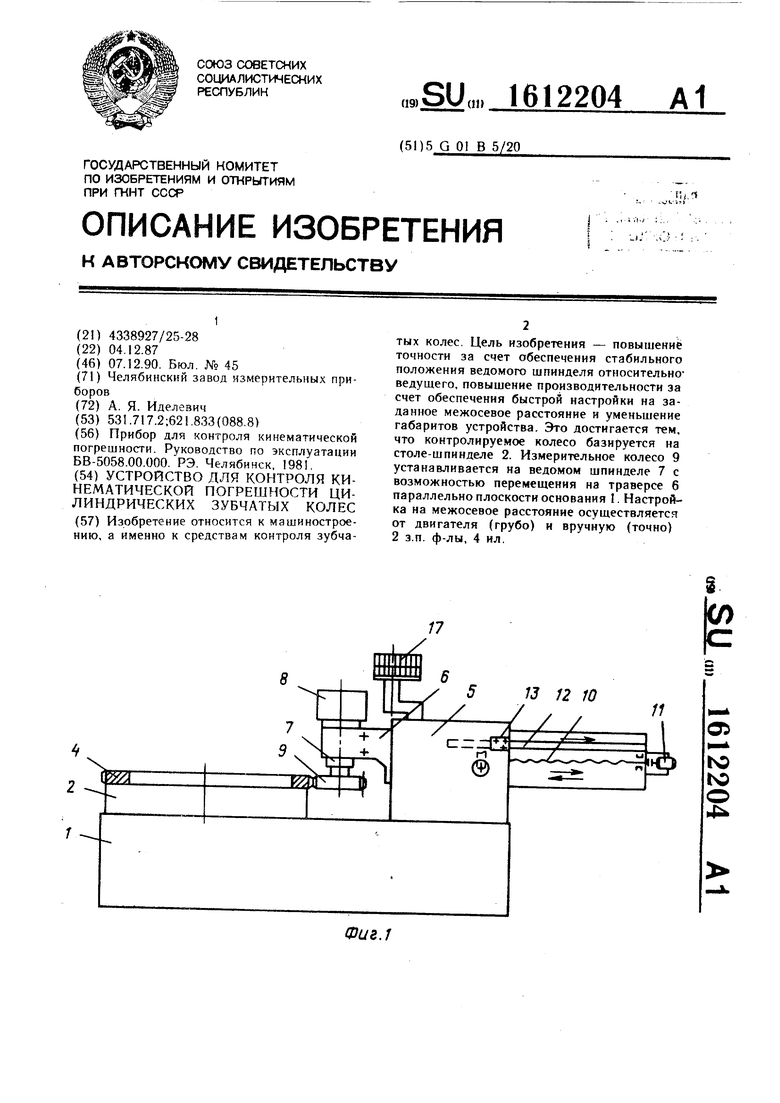
Фиг.г
ФигЗ
фиги
| Прибор для контроля кинематической погрешности | |||
| Прибор для вскапывания земли | 1925 |
|
SU5058A1 |
| РЭ | |||
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
