.г.
ю
Изобретение относится к общему машиностроению и может быть использовано в конструкциях манипуляторов.
Цель изобретения - расширение технологических возможностей и анипулятора путем обеспечения дополнительной степени подвижности звеньев.
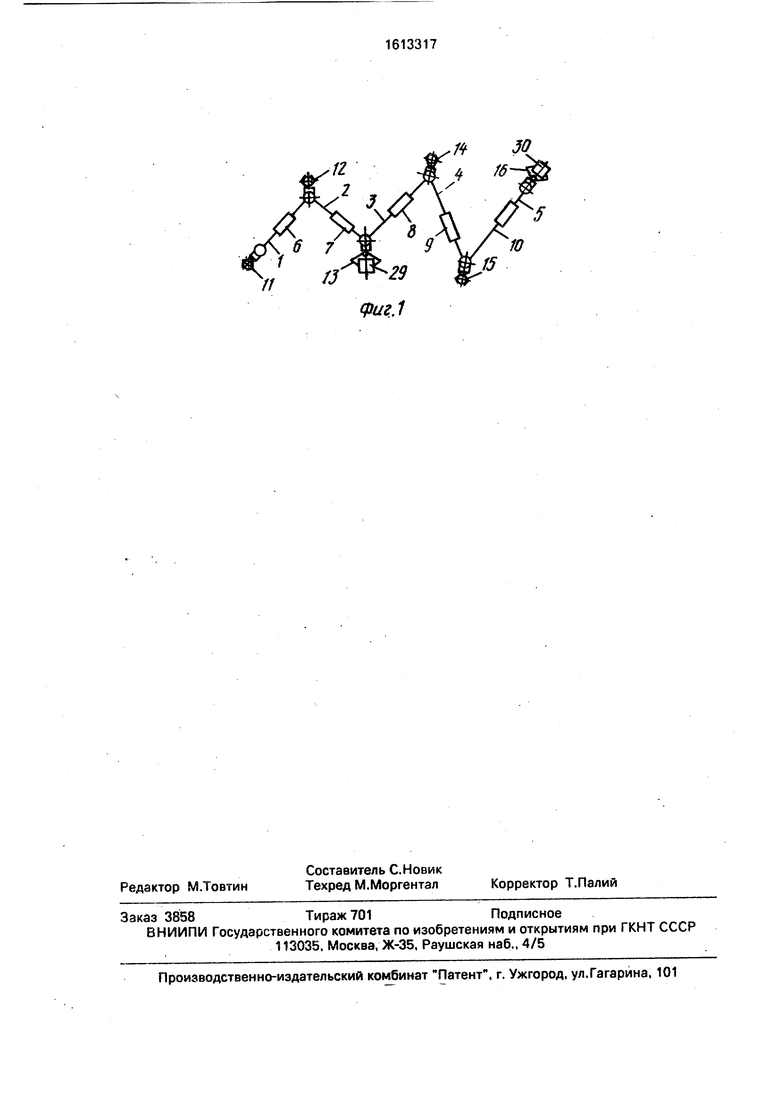
На фиг.1 показана общая схема лятора; на фиг.2 - узлы сопряжений смежных звеньев и схватов, с различными вариантами опорных элементов.
Манипулятор содержит исполнительные звенья 1-5, имеющие возможность изменять свою длину с помощью вспомогательных приводов 6-10. Исполнительные звенья и схваты П-Тб сопряжены Е; узлы вращения с помощью общей оси 17, на которой между сопрягаемыми звеньями установлено зубчатое колесо 18 (например, с внутренним зацеплением), к которому при- креплен схват 14 с возможностью ротации. С зубчатым колесом 18 в зацеплении находятся шестерни 19, 20 основных независимых приводов 21, 22, каждый из которых установлен на концах смежных звеньев. Ось вращения 17 выполняет функции общего штока двух вспомогательных приводов 23, 24, обеспечивающих независимые поступательные перемещения каждого охвата и сопрягаемых звеньев перпендику- лярно их продольным осям. Конструкция всех, звеньев, схватов и узлов их сопряжения манипулятора одинакова и является азаимозаменя.емой.
Любой из схватов 11-16 может фикси- роваться на различных одгенных и переносных 25, 25 а также на стационарных 27 или аыдвижных элементах 28, используемых ivsa- .пятором в качестве опор при его передвижении. Для примера (фиг.1) схва- ты 11-15 изображены зафиксированными на опорных элементах, а в схватах 13, 16 показаны оГЗъек ы манипулирования 29, 30.
Манипулятор работает следующим образом.
Для поворота исполнительного звена 3 относительно оси 17 необходимо включить основной привод 21, ЩУ1/- этом шестерня 20
будет обкатываться по внутренней стороне зубчатого колеса 18. При заторможенном приводе 22 зубчатое колесо 18 вместе со схватом 14, установленным на нем, будет зафиксировано относительно звена 4. Для изменения положения звена 4 относительно звена 3 и схвата 14 необходимо затормозить привод 21 и включить привод 22. При синхронной работе двух приводов 21 и 22 положение схвата 14 изменяется относительно звеньев 3, 4 с сохранением положения между ними. За счет того, что ось 17 является единым штоком вспомогательных приводов 23,24, управления каждым приводом в определенной последовательности позволяет получить различное сочетание относительных поступательных перемещений схвата 14 и звеньев 3, 4 в направлении, перпендикулярном оси 17. При этом контакт в зацеплении шестерен 19, 20 и зубчатого колеса 18 не нарушается, что возможно из-за того, что зубья колеса 18 удлинены с учетом хода приводов 23, 24. Любой из схватов 11-16 может взять и переместить объекты манипулирования 29, 30 или зафиксироваться на сменных 25 и переносных 26, а также на стационарных 27 или выдвижных 28 злементах, используемых манипулятором в качестве опор при его передвижении. При передвижении манипулятора опорные элементы в определенной последовательности отрываются от предыдущей точки пола приводами 23, 24 и за счет переноса, осуществляемого совместной работой приводов 8, 9, 21,22 (фиг.2), устанавливаются в следующие точки опоры на полу, при этом можно обеспечить обход препятствий без соударений.
Формула изобретения Манипулятор по авт.св. NJ 1493457, о т- личающийся тем, что, с целью расширения технологических возможностей путем обеспечения дополнительной степени подвижности звеньев, дополнительные приводы поступательного перемещения схватов размещены по одному на концах каждого звена, причем оба привода каждых смежных звеньев связаны с одним схватом.
ю
15
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
Изобретение относится к общему машиностроению и может быть использовано в конструкциях манипуляторов. Цель изобретения состоит в расширении технологических возможностей путем обеспечения дополнительной степени подвижности звеньев манипулятора. Манипулятор содержит исполнительные звенья 3, 4 и схваты 13, 14, соединенные таким образом, что могут независимо вращаться относительно общих осей 17 с помощью основных приводов 21, 22. Ось вращения 17 схвата 14 и звеньев 3, 4 является также общим штоком двух вспомогательных приводов 23, 24, обеспечивающих независимые поступательные перемещения каждого схвата и сопряженных звеньев перпендикулярно их продольным осям. Каждый схват манипулятора имеет возможность фиксироваться на различных сменных 25 и переносных 26, стационарных 27 или выдвижных 28 элементах, используемых манипулятором в качестве опор при его передвижении. 2 ил.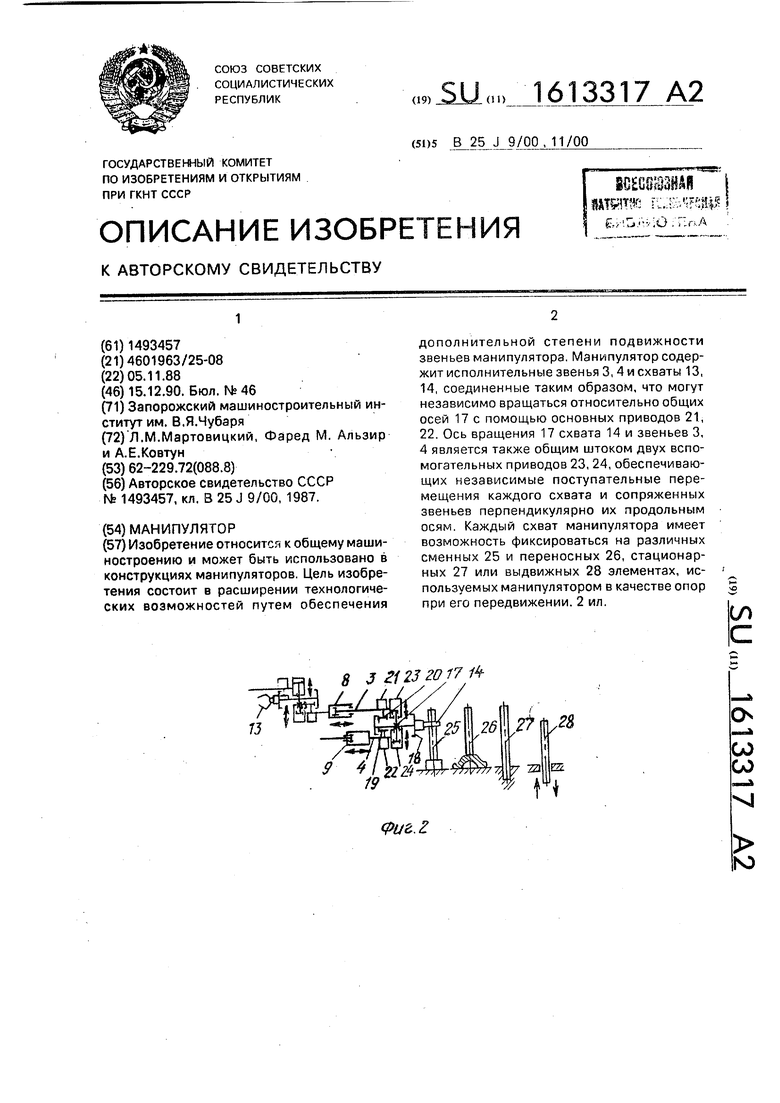
Фиг.1
| Манипулятор | 1987 |
|
SU1493457A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
