Фиг 1
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при автоматизации технологических процессов.
Целью изобретения является расшире- ние технологических возможностей за счет обеспечения схвату дополнительных степеней подвижности.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - кинематическая схема узла сочленения; на фиг. 3 - узел сочленения, общий вид.
Манипулятор установлен на основании 1 и содержит четыре шарнирно связанные между собой звена 2-5, образующие ромб (модуль), связанный с одним из шарниров 6 схват 7, расположенный на узле 8 его сочленения со звеньями манипулятора, и блок 9 управления. Шарниром 10 звенья манипулятора связаны с колонной 11.
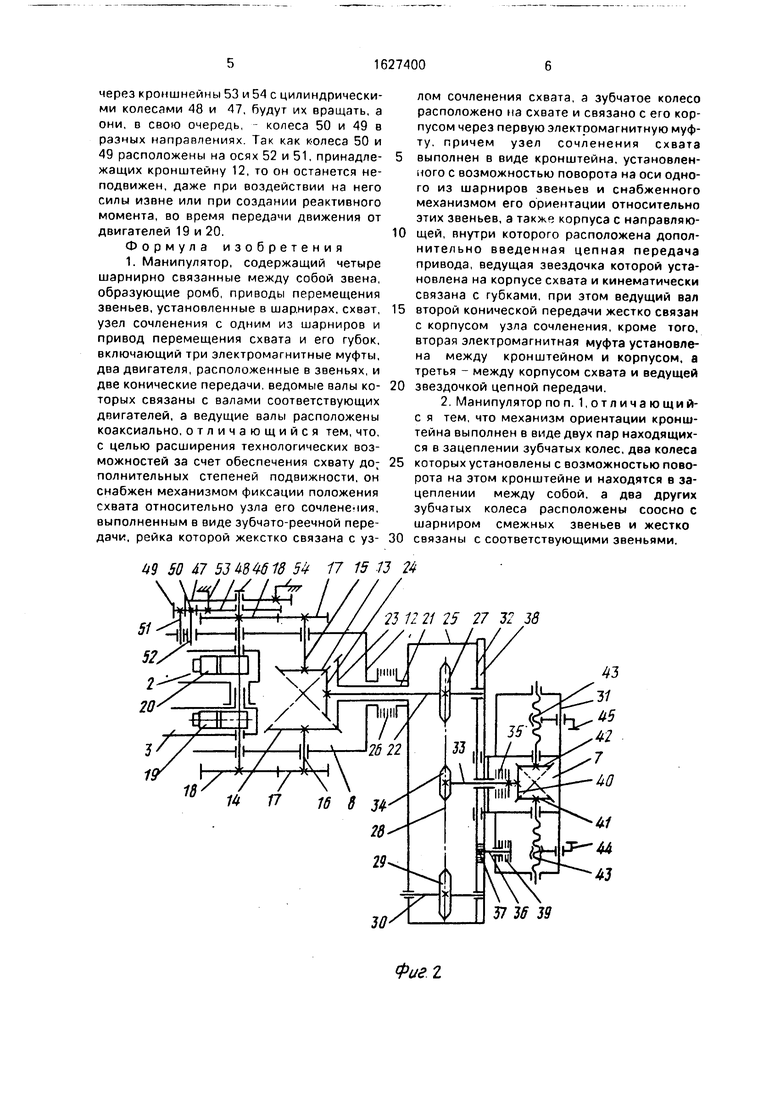
Узел 8 сочленения (фиг. 2) включает кронштейн 12, охватывающий шарнир 6 сопряженных звеньев 2 и 3, внутри которого расположены две конические передачи, ведомые колеса 13 и 14 которых расположены на осях 15 и 16 и связаны через цилиндрические зубчатые колеса 17 и 18 с двигателями 19 и 20, расположенными внутри звеньев 2 и 3. Ведущие валы 21 и 22 конических колес 23 и 24 расположены коаксиально. Конец вала 21 жестко связан с корпусом 25, а конец вала 22 установлен с возможностью вращения относительно корпуса 25. Электромагнитная муфта 26 установлена между кронштейном 12 и корпусом 25 с возможно- стью их кинематического замыкания. Внутри корпуса 25 расположена цепная передача, состоящая из звездочки 27, жестко установленной на валу 22, и через цепь 28 кинематически связана со звездочкой 29, установленной на оси 30, расположенной в корпусе 25 с возможностью вращения. Корпус 31 охвата 7 расположен на направляющей 32, принадлежащей корпусу 25, с возможностью перемещения вдоль нее. В корпусе 31 схвата расположена ось 33, на одном конце которой закреплена ведущая звездочка 34, находящаяся в зацеплении с цепью 28, На оси 33 расположена электромагнитная муфта 35, позволяющая замы- кать ось 33 на корпусе 31 схвата. Ось 36 установлена в корпусе 31 и имеет на одном конце зубчатое колесо 37, находящееся в зацеплении с зубчатой рейкой. 38, жестко связанной с корпусом 25, которые вместе с элекромагнитной муфтой 39 образуют механизм фиксации схвата 7. На оси 33 внутри корпуса 31 схвата установлено коническое зубчатое колесо 40, позволяющее через находящийся с ним в зацеплении конические
колеса 41 и 42 передавать движение исполнительному механизму 43, а через него губкам 44 и 45 схвата 7.
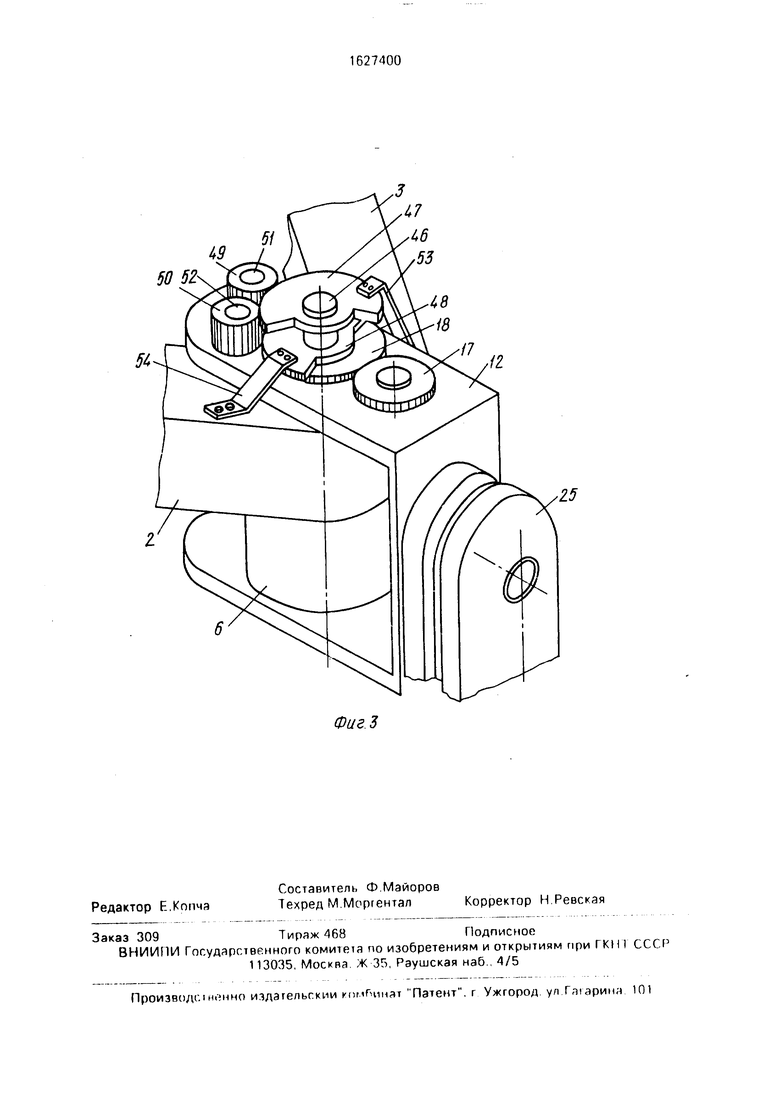
На кронштейне 12 (фиг. 3) установлен механизм его ориентации, включающий расположенные соосно оси 46 шарнира 6, два зубчатых колеса 47 и 48, попарно находящихся в зацеплении с зубчатыми колесами 49 и 50, которые, в свою очередь, находятся в зацеплении между собой и расположены на осях 51 и 52, принадлежащих кронштейну 12. Колеса 47 и 48 находятся на оси 46 и через кронштейны 53 и 54 связаны со звеньями 3 и 2.
Манипулятор работает следующим образом.
При нахождении электромагнитных муфт 26, 35 и 38 в замкнутом положении происходит замыкание кронштейна 12 с корпусом 25, оси 33 и 36 с корпусом 31 схвата. что равносильно кинематическому замыканию выходных валов двигателей 19 и 20. Такое замыкание позволяет при соответствующем включении приводов манипулятора осуществлять сжатие-разжатие , используя и двигатели 19 и 20.
Когда электромагнитная муфта 26 находится в разомкнутом положении, а электромагнитные муфты 35 и 39 - в замкнутом, то при соответствующем включении дпигате- лей 19 и 20 будет осуществляться ориентация корпуса 25. а следовательно, и схвата 7 относительно кронштейна 12.
При разомкнутом положении электромагнитной муфты 36 и замкнутой муфты 39 и включении двигателя 20 будет осуществляться сжатие или разжатие губок 44 и 45 схвата 7. При этом электромагнитная муфта 26 может находиться в замкнутом положении, что дает фиксацию положения кронштейна 12 по отношению к корпусу 25. или в положении разомкнутом, тогда положение корпуса 25 в пространстве определяется двигателем 19.
Перемещение схвата 7 относительно направляющей будет осуществляться при включении двигателя 20, когда эпектромаг- нитная муфта 35 находится в замкнутом положении, а муфта 39 - в разомкнутом. При этом взаимное положение кронштейна 12 и корпуса 25 может осуществляться электромагнитной муфтой 26 или двигателем 19.
Кинематическое замыкание зубчатых колес 48 и 47 с зубчатыми колесами 50 и 49 и звеньями 3 и 2 обеспечивает независимое положение кронштейна 12 относительно оси 46 при создании неравномерною распределения крутящего момента двигателя 19 и 20. При сжатии-разжатии ромба манипулятора звенья 2 и 3. жестко связанные
через кроншнейны 53 и 54 с цилиндрическими колесами 48 и 47, будут их вращать, а они, в свою очередь, - колеса 50 и 49 в разных направлениях. Так как колеса 50 и 49 расположены на осях 52 и 51, принадле- жащих кронштейну 12, то он останется неподвижен, даже при воздействии на него силы извне или при создании реактивного момента, во время передачи движения от двигателей 19 и 20.
Формула изобретения 1. Манипулятор, содержащий четыре шарнирно связанные между собой звена, образующие ромб, приводы перемещения звеньев, установленные в шарнирах, схват, узел сочленения с одним из шарниров и привод перемещения схвата и его губок, включающий три электромагнитные муфты, два двигателя, расположенные в звеньях, и две конические передачи, ведомые валы ко- торых связаны с валами соответствующих двигателей, а ведущие валы расположены коаксиально, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения схвату до; полнительных степеней подвижности, он снабжен механизмом фиксации положения схвата относительно узла его сочленения, выполненным в виде зубчато-реечной передачи, рейка которой жекстко связана с уз-
лом сочленения схвата, а зубчатое колесо расположено на схвате и связано с его корпусом через первую электромагнитную муфту, причем узел сочленения схвата выполнен в виде кронштейна, установленного с возможностью поворота на оси одного из шарниров звеньев и снабженного механизмом его ориентации относительно этих звеньев, а также корпуса с направляющей, внутри которого расположена дополнительно введенная цепная передача привода, ведущая звездочка которой установлена на корпусе схвата и кинематически связана с губками, при этом ведущий вал второй конической передачи жестко связан с корпусом узла сочленения, кроме того, вторая электромагнитная муфта установлена между кронштейном и корпусом, а третья - между корпусом схвата и ведущей звездочкой цепной передачи.
2. Манипулятор по п. 1,отличающий- с я тем, что механизм ориентации кронштейна выполнен в виде двух пар находящихся в зацеплении зубчатых колес, два колеса которых установлены с возможностью поворота на этом кронштейне и находятся в зацеплении между собой, а два других зубчатых колеса расположены соосно с шарниром смежных звеньев и жестко связаны с соответствующими звеньями.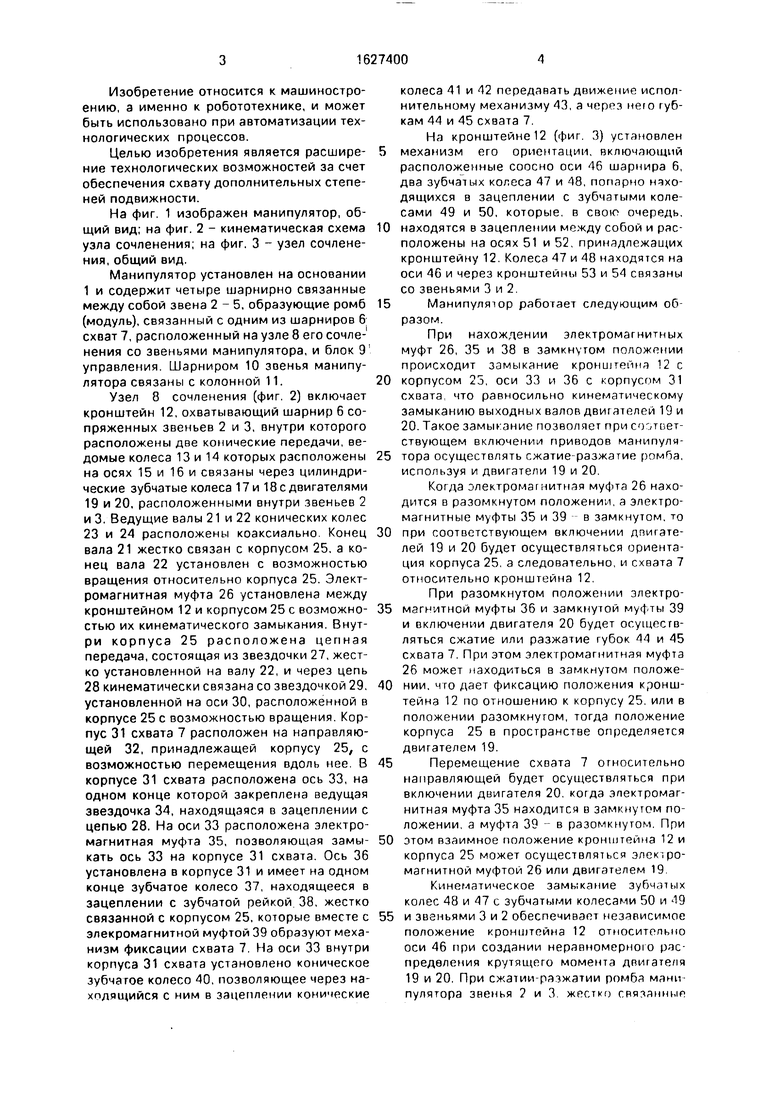
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный манипулятор | 1983 |
|
SU1119838A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано при автоматизации технологических процессов. Целью изобретения является расширение технологических возможностей за счет обеспечения схвату дополнительных степеней подвижности. Перемещение в пространстве схвата 7 осуществляется за счет перемещения шар- нирно связанных звеньев 2-5, образующих ромб, поворота корпуса узла сочленения 8 и продольного перемещения схвата 7 по этому корпусу. При этом поворот узла сочленения 8 перемещения схвата 7 по направляющим корпуса этого узла, а также движение губок схвата происходит от двух двигателей, расположенных в звеньях 2 и 3, при соответствующих комбинациях включения трех электромагнитных муфт, расположенных в узле сочленения 8 и схвате 7, и двигателей. 1 з.п.ф-лы, 3 ил.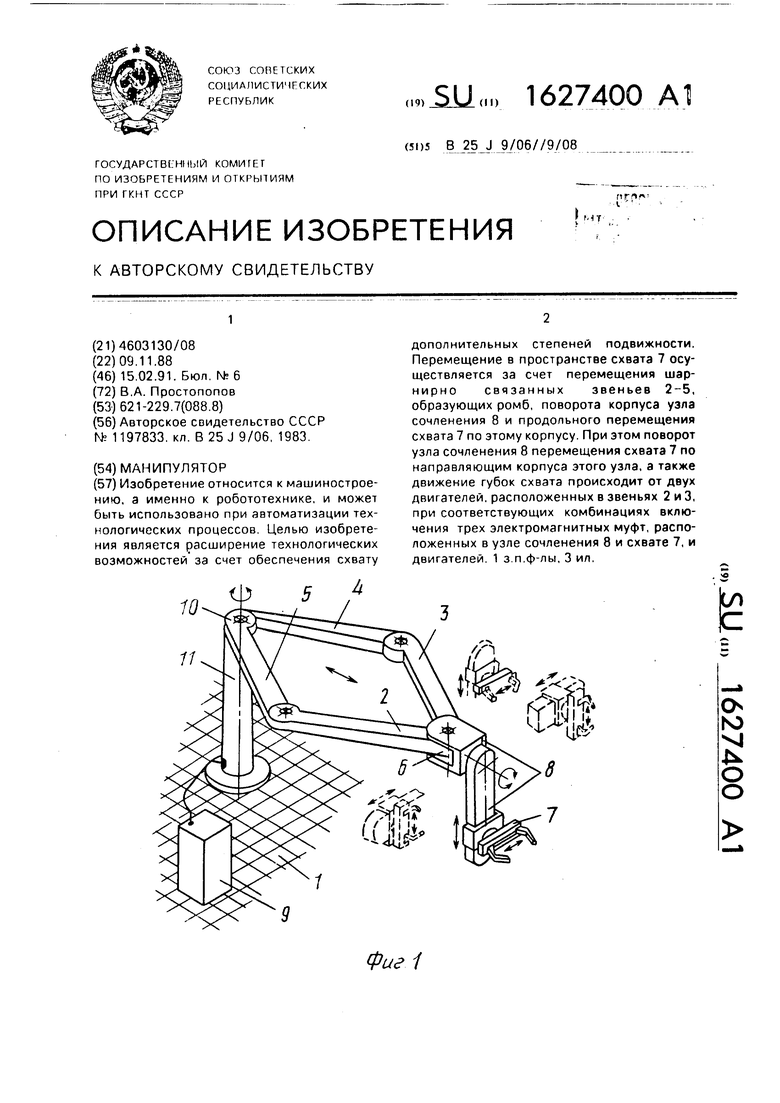
U9 50 47 53 48 4618 54 17 15
ijfi /it //
А,Л i||| 1 / /
23 12 21 25 27 32 38
Фиг 2
49
50 52
ФигЗ
| Манипулятор | 1984 |
|
SU1197833A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
