Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов.
Целью изобретения является повышение производительности и точности позиционирования за счет увеличения жесткости в динамических режимах.
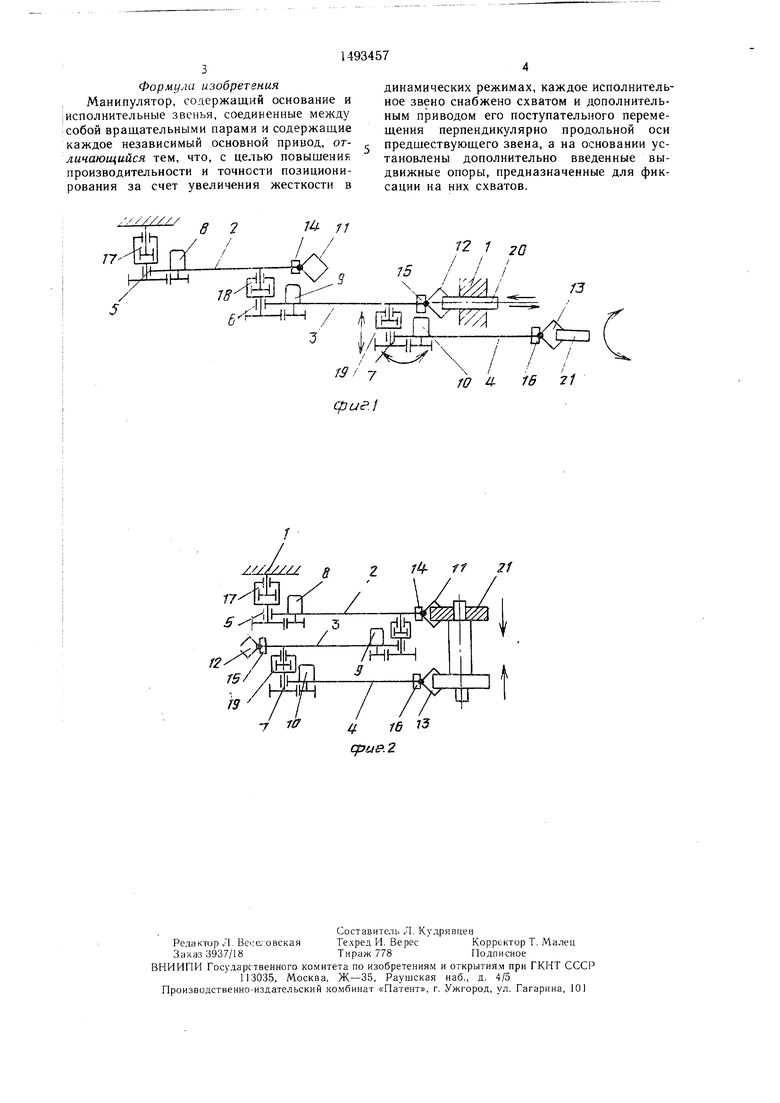
На фиг. 1 показана схема манипулятора в вытянутом положении; на фиг. 2 - то же, в сложенном.
Манипулятор содержит основание 1 и исполнительные звенья 2, 3 и 4, связанные между собой вращательными парами 5, 6 и 7: Каждое звено 2, 3 и 4 имеет основные независимые приводы 8, 9 и 10 их относительного поворота и снабжено схватами .11, 12, 13 соответственно. Последние выполнены ротационными, для чего они снабжены приводами 14, 15 и 16 их поворота вокруг осей соответствующих звеньев 2, 3 и 4. Эти звенья снабжены дополнительными приводами 17, 18 и 19 поступательного перемещения, каждый из которых перпендикулярен продольной
оси предшествующего звена. На основании I манипулятора установлены выдвижные опоры 20 для фиксации на них схватов 11, 12 и 13 (на фиг. 1 показана одна опора 20, на которой зафиксирован схват 12). Для примера в схвате 13 показан объект 21 манипулирования.
Манипулятор работает следующим образом.
Исполнительные звенья 2, 3 и 4 поворачиваются на основании 1 и относительно друг друга от приводов 9, 8 и 10 и перемещаются поступательно от дополнительных приводов 17, 18 и 19. Установленные на каждом звене схваты 11, 12 и 13 поворачиваются и вокруг своих звеньев 2, 3 и 4 от приводов 14 15 и 16. Любой из схватов .11, 12, 13 может взять и переместить объект 21 или зафиксироваться на выдвижной опоре 20. Благодаря последнему действию жесткость манипулятора увеличивается и повышается точность позиционирования. Применение одновременно нескольких схватов повышает производительность.
4:
СО
оо ел
Формула изобретения Манипулятор, содержащий основание и Исполнительные звенья, соединенные между собой вращательными нарами и содержащие каждое независимый основной привод, ог- личающийся тем, что, с целью повыщения производительности и точности позиционирования за счет увеличения жесткости в
динамических режимах, каждое исполнительное звено снабжено схватом и дополнительным приводом его поступательного перемещения перпендикулярно продольной оси предществующего звена, а на основании установлены дополнительно введенные выдвижные опоры, предназначенные для фиксации на них схватов.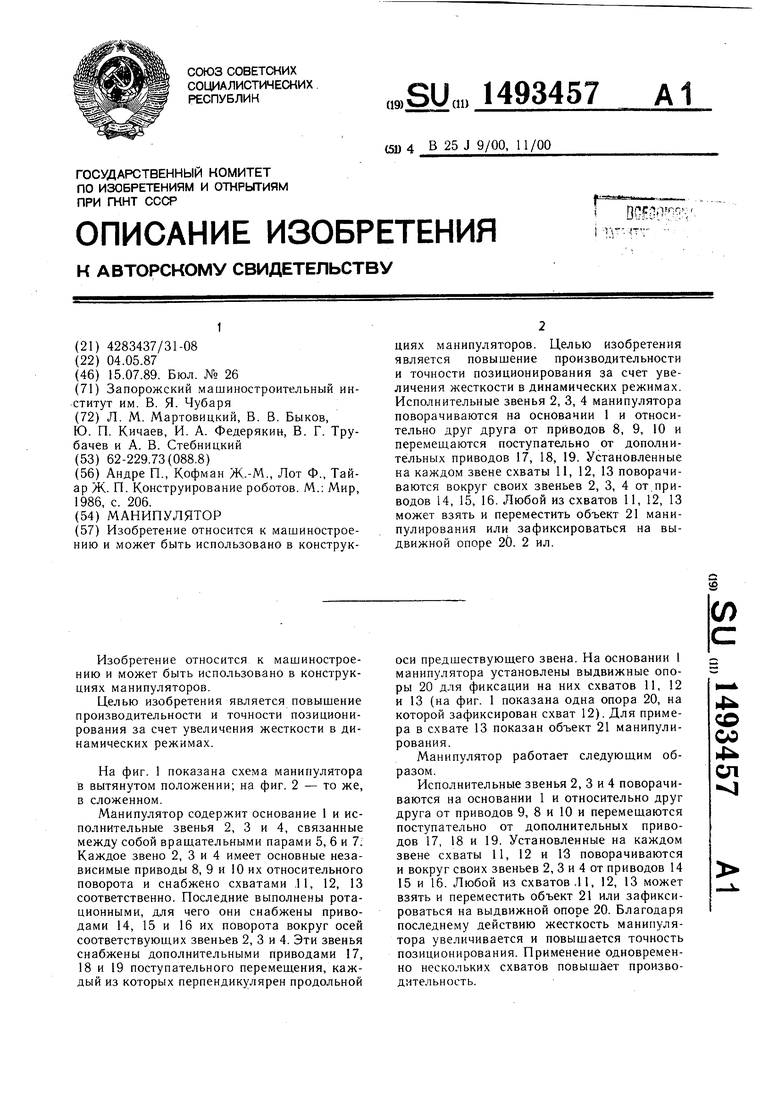
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1613317A2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Моделирующее устройство | 1980 |
|
SU905059A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| Манипулятор | 1986 |
|
SU1364468A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является повышение производительности и точности позиционирования за счет увеличения жесткости в динамических режимах. Исполнительные звенья 2,3,4 манипулятора поворачиваются на основании 1 и относительно друг друга от приводов 8, 9, 10 и перемещаются поступательно от дополнительных приводов 17,18, 19. Установленные на каждом звене схваты 11, 12, 13 поворачиваются вокруг своих звеньев 2, 3, 4 от приводов 14, 15, 16. Любой из схватов 11, 12, 13 может взять и переместить объект 21 манипулирования или зафиксироваться на выдвижной опоре 20. 2 ил.
82 1 1
ГЗ
| Андре П., Кофман Ж..-М., Лот Ф., Тай- ар Ж | |||
| П | |||
| Конструирование роботов | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
