От cinaduau3api/a-,rj Г е с/па ц/газаруюшеа щей системы упраб- систены у/ рабления
Изобретение относится к устройст вам автоматизации управления сложны- ми технологическими объектами и может быть использрззано для повышения э фективности их функционирования при наличии нарушений.
Целью изобретения является повыше ние точности управления и степени со ответствия управляющих воздействий возникающим в объекте нарушениям.
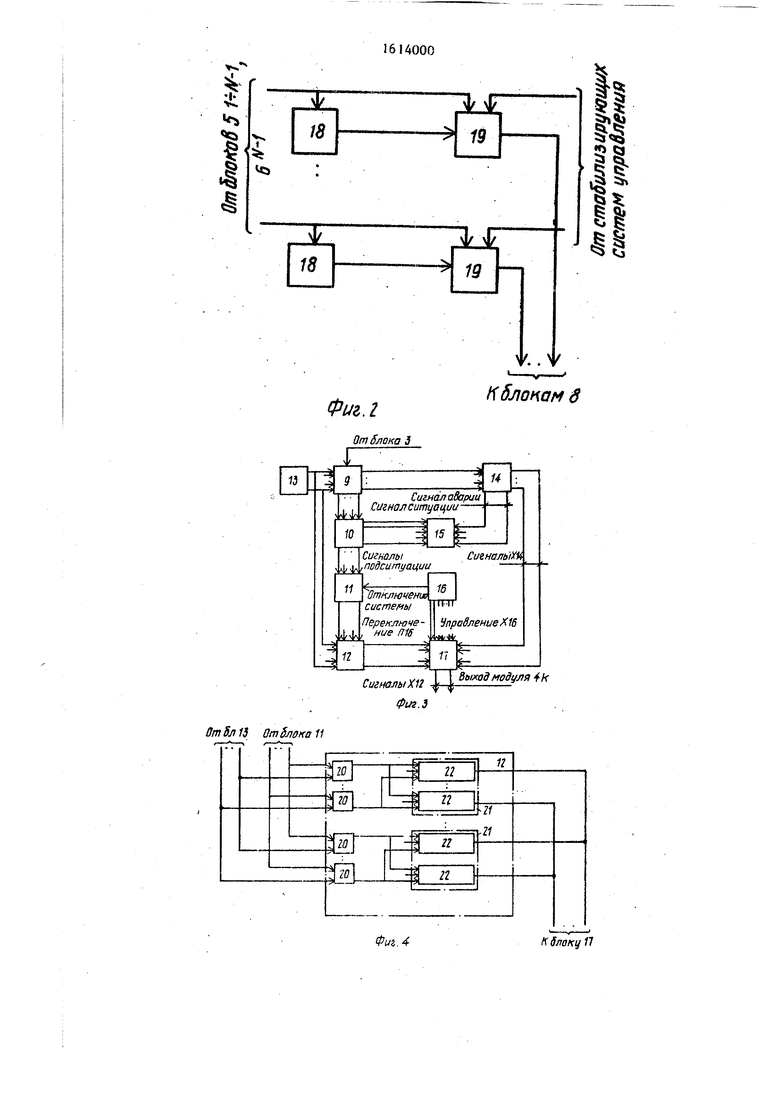
На фиг,1 приведена схема систеь ситуационного управления; на фиг,2 то же, блока переключения; на фиг,3 то же, узла идентификации нарушений и выработки управляющих воздействий; на фиг,4 - то .же,, блока расчета управляющих сигналов; на фиг,5 -- то же, вычислительного модуля; на фиг,6 то же, коммутатора,
Система содержит блок 1 датчиков глобальных параметров, блок 2 обнаружения нарушений, блок 3 организации перебора возможных нарушений, узлы 4 идентификации нарушений и выработки управляющих воздействий, ны 5, элементы ЗАПРЕТ 6, блоки 7 переключения, исполнительные органы 8 блок 9 двухпороговых элементов, блок ю классификации нарушений, блок 11 ключей, блок 12 расчета управляющих сигналов, блок 13 датчиков частных параметров, блок 14 аварийной защиты блок 15 индикации, панель 16 управления режимом, коммутатор 17, схему 18 сравнения, реле 19, ключи (клапаны) 20, подблоки 21 управления ситуациями, построенные на вычислительных модулях 22, включаюшях усилители 23, квадраторы 24, умножители 25, сумма- торы 26, а также реле 27, 28,
Система работает следующим образом.
Информация об основных характеристиках работы объекта снимается бло- ком 1 и поступает в блок 2, При обнл ружении нарушения работы объекта блок 2 включает блок 3, который последовательно через заданные промежутки времени включает все узлы 4 (где k 1,2,..., N) в соответствии с их приоритетом (приоритет устанавливается априори, например по степени опасности ситуаций по своим последствиям). Блок 3 может быть вы- полнен в виде многоцепного реле времени или командного электропневматического прибора. Каждый узеп 4 преназначен для управления только в определенной ситуации. Поэтому при по лучении сигнала от блока 3 узел 4 сравнивает возникшую ситуацию на объекте с заданной и в случае идентификации отрабатывает управляющие воз- действия на объект. Подробно описание работь узла 4 приводится ниже.
Если обнаружено несколько ситуаций, то предусмотрена следующая схема компромисса: система предоставляет для локализации ситуации самого высокого приоритета из группы обнаруженных ситуаций все нeoбxoди 4.e испол нительные органы, а для локализации остальных ситуаций - только те испол нительные органы, которые не бьши задействованы более приоритетными ситуациями. Это происходит следующим образом.
Если ситуация идентифицирована узлом 4 , то на его выходе появление сигналов фиксируется нуль-органами 5 которые работают по принципу сравнения контролируемого сигнала с некоторым заданным значением (с нулем). Задание при этом настраивается на ми.нимапьный порог срабатывания так, чтобы при появлении даже минимального управляющего сигнала отрабатывался сигнал, равный единице. Сигналы от нуль-органов 5 поступают в элементы ЗАПРЕТ б , установленные на тех выходных каналах- всех узлов, начиная от 4 до 4, которые выходят на те же самые исполнительные органы 8, При, этом элементы б пропускают через себя управляющий сигнал, если сигнал на выходах нуль-органов 5 равен нулю, и запирают управляющий сигнал, если сигнал на выходах нуль-органов 5 равен единице. Таким образом, если по какому-либо каналу зафиксировано появление управляющего сигнала на некоторый исполнительный орган 8, то перекрываютcs| все остальные каналы, выходящие на этот же исполнительный орган от других узлов 4 , 4 , .,.,4 „ Так достигается обеспечение наивысшего приоритета управления по первой ситуации. Наличие в системе элементов 5,6, устанавливаемых после узлов 4, позно. тяет осуществлять полное управление но наиболее приоритетной- ситуации и управление незадействован : ными исполни-гельными органами по другим ситуациям, ,отвращая тем са- нежел;чтр.п1.пое 5х развитие и повы-
шая живучесть функционирования объекта в условиях наличия нескольких нарушений. Указанное управление необходи МО использовать в тех случаях, когда в силу специфических особенностей объекта последовательная локализация взаимосвязанных ситуаций может привести к нежелательному развитию событий и авариям и требуется хотя бы частичное воздействие по всем об-- нарушенным ситуациям одновременно.
Если первая ситуация не идентифи - цируется, то на выходе узла 4 сигнал равен нулю и, соответственно, элемеи ты З и 6 не срабатывают, управляю щие каналы от узлов 4 , 4 ,,.., 4 на исполнительные органы 8 открыты, что дает возможность реализовать уп равление по менее приоритетным ситуациям в случае их возникновения При реактивации узла 4 выполняются дей ствия, полностью аналогичные работе узла 4- I При этом, если каналы не пе
10
15140006
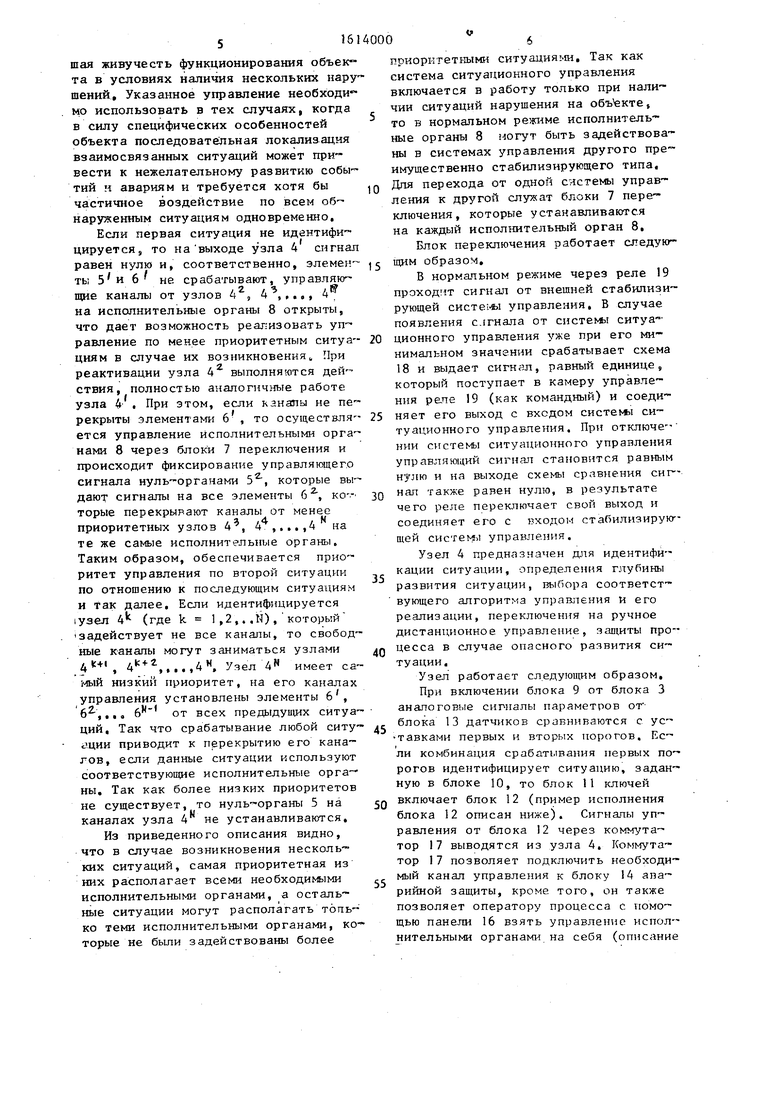
приоритетными ситуация -ш. Так как система ситуационного управления включается в работу только при наличии ситуаций нарушения на объекте то в нормальном режиме исполнительные органы 8 могут быть задействованы в системах управления другого преимущественно стабилизирующего типа. Для перехода от одной системы управления к другой служат блоки 7 переключения, которые устанавливаются на каждый исполнительный орган 8,
Блок переключения работает следую- ,с щим образом,
В нормапьном режиме через реле 19 проходит сигнал от внешней стабипизи- рующей систег-ы управления, В случае появления слгнала от систеь ситуа ционного управления уже при его ми нимальном значении срабатывает схема 18 и выдает сигнал, равный единице, который поступает в камеру управления репе 19 (как командный) и соеди20
рекрыты элементаьш б , то осуществля- 25 няет его выход с входом cиcтe I си
.... л.- | 1 хчтг 1тТТт- 1 1-Ч Г Т Т7ЕЛТ1
ется управление Исполнительными органами 8 через блоки 7 переключения и происходит фиксирование управляющего
5.
сигнала нуль-органами
которые ВЫ-дают сигналы на все элементы 6 , ко-.- ЗО торые перекрывают каналы от менее приоритетных узлов 4, 4 ,...,4 на те же самые исполнительные органы. Таким образом, обеспечивается приоритет управления по второй ситуации , по отношению к последующим ситуациям и так далее. Если идентифицируется |узел 4 (где k 1 ,2,. .N) , который задействует не все каналы, то свободные каналы могут заниматься узлами Q д K+i 4,,,, ,4 , Узел 4 имеет са 1чый низкий приоритет, на его каналах управления установлены элементы 6 , 6,,,, от всех предагдущих ситуа
туационного управления. При отключе НИИ систекы ситуационного управления управляющий сигнал становится равным нулю и на выходе схемы сравнения сиг-нал также равен нулю, в результате чего реле переключает свой выход и соединяет его с входом стабилизирую щей систе№1 управления.
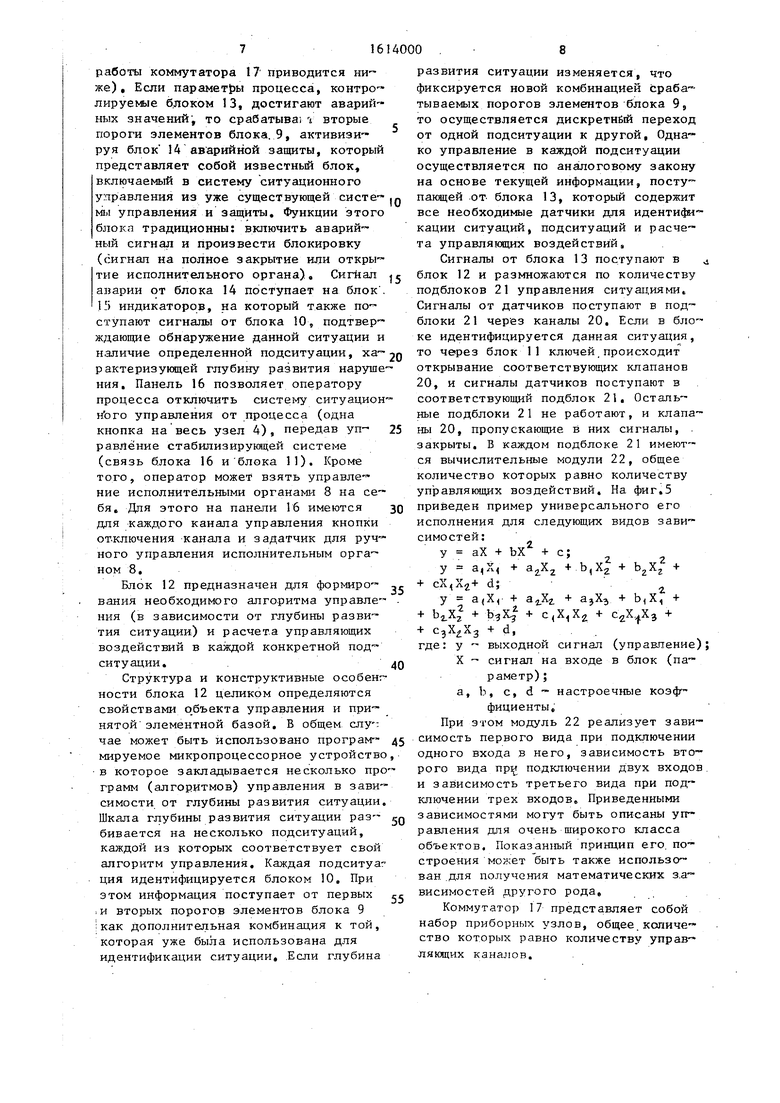
Узел 4 предназначен для идентификации ситуации, определения глубины развития ситуации, 1зыбора соответствующего алгоритма управления и его реализации, переключения на ручное дистанционное управление, запщты процесса в случае опасного развития ситуации.
Узел работает следующим образом.
При включении блока 9 от блока 3
аналоговые сигналы параметров от о . ,,« оU1 всел иусм° МУ -л .г11 J1 сд
ций. Так что срабатывание любой ситу- дЗ датчиков сравниваются с ус
, т атз V rron-OKlv и RTrmMV ТТОПГ-)ГПН.
ации приводит к перекрытию его кана- гов, если данные ситуации используют соответствующие исполнительные орга-- ны. Так как более низких приоритетов не существует, то нуль-органы 5 на каналах узла 4 не устанавливаются,
Из приведенного описания видно, что в случае возникновения нескольких ситуаций, самая приоритетная из них располагает всеми необходимыми исполнительными органами, а остальные ситуации могут располагать только теми исполнительными органами, которые не были задействованы более
50
тавками первых и вторых порогов. Если комбинация срабатывания первых порогов идентифицирует ситуацию, заданную в блоке 10, то блок 11 ключей включает блок 12 (пример исполнения блока 12 описан ниже). Сигналы управления от блока 12 через коммутатор 17 выводятся из узла 4. Коммутатор 17 позволяет подключить необходимый канал управления к блоку 14 ana- рийной защиты, кроме того, он также позволяет оператору процесса с помощью панели 16 взять управление исполнительными органами на себя (описание
няет его выход с входом cиcтe I си
.... л.- | 1 хчтг 1тТТт- 1 1-Ч Г Т Т7ЕЛТ1
туационного управления. При отключе НИИ систекы ситуационного управления управляющий сигнал становится равным нулю и на выходе схемы сравнения сигнал также равен нулю, в результате чего реле переключает свой выход и соединяет его с входом стабилизирую щей систе№1 управления.
Узел 4 предназначен для идентификации ситуации, определения глубины развития ситуации, 1зыбора соответствующего алгоритма управления и его реализации, переключения на ручное дистанционное управление, запщты процесса в случае опасного развития ситуации.
Узел работает следующим образом.
При включении блока 9 от блока 3
аналоговые сигналы параметров от З датчиков сравниваются с ус
, т атз V rron-OKlv и RTrmMV ТТОПГ-)ГПН.
0
тавками первых и вторых порогов. Если комбинация срабатывания первых порогов идентифицирует ситуацию, заданную в блоке 10, то блок 11 ключей включает блок 12 (пример исполнения блока 12 описан ниже). Сигналы управления от блока 12 через коммутатор 17 выводятся из узла 4. Коммутатор 17 позволяет подключить необходимый канал управления к блоку 14 ana- рийной защиты, кроме того, он также позволяет оператору процесса с помощью панели 16 взять управление исполнительными органами на себя (описание
работы коммутатора IT приводится ни же). Если парамет1)Ы процесса, контро nnpyeNbie блоком 13, достигают аварийных значений; то срабатыва/ г вторые пороги элементов блока. 9, активизи - руя блок 4 аварийной защиты, который представляет собой известный блок, включаемый в систему ситуационного управления из уже существующей систе- м)1 управления и защиты. Функции зтого блока традиционны: включить аварийный сигнал и произвести блокировку (;игнал на полное закрытие или откры™ тие исполнительного органа), Сигйал аварии от блока 14 поступает на блок . 1Г) индикаторов, на который также по ступают сигналы от блока 10, подтверждающие обнаружение данной ситуации и н.аличие определенной подситуации, ха™ рактеризующей глубину развития наруше ния. Панель 16 позволяет оператору процесса отключить систему ситуацион нЬго управления от процесса (одна кнопка на весь узел 4), передав уп- равлёние стабилизирующей системе (связь блока 16 и блока 11). Кроме того, оператор может взять управление ИСПОЛНИТЕЛЬНЫМИ органами 8 на себя. Для этого на панели 16 имеются для каждого канала управления кнопки отключения канала и задатчик для ручного управления исполнительным орга ном 8,
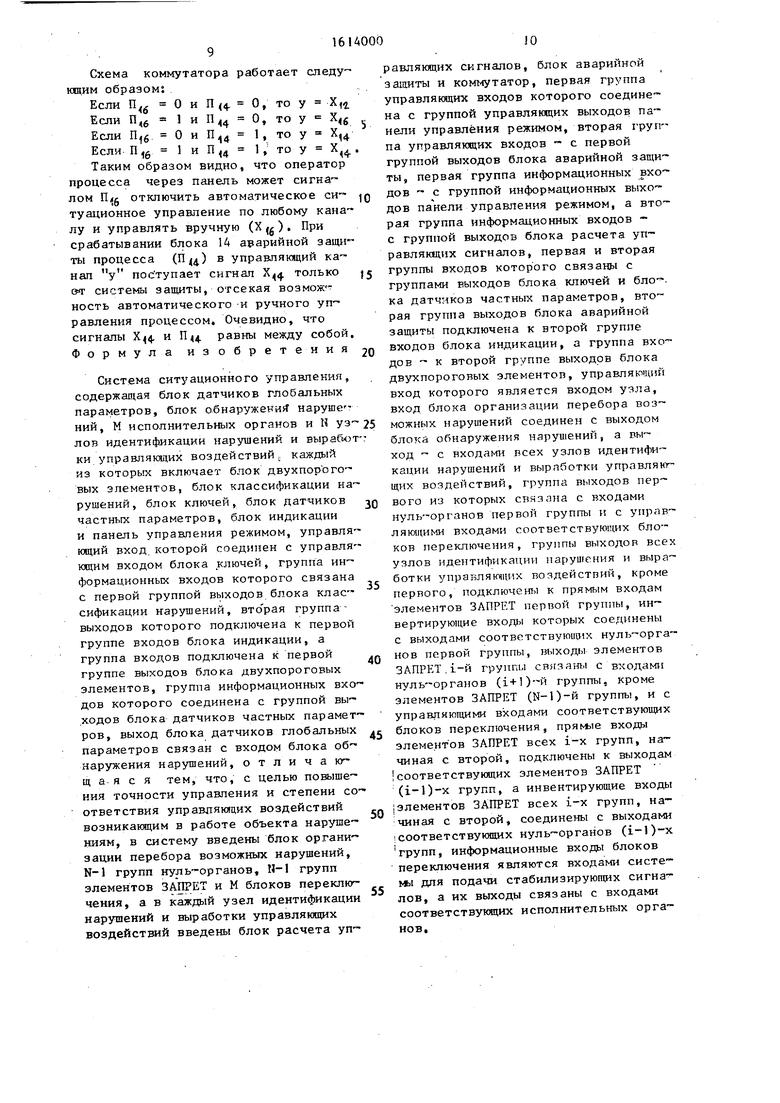
Блок 12 предназначен для формиро- вания необходимого алгоритма управле ния (в зависимости от глубины развития ситуации) и расчета управляющих воздействий в каждой конкретной под- ситуации,.
Структура и конструктивные особенг ности блока 12 целиком определяются свойствами о.бъекта управления и принятой элементной базой, В общем спу: чае может быть использовано програм- мируемое микропроцессорное устройство в которое закладывается несколько программ (алгоритмов) управления в зависимости от глубины развития ситуации. Шкала глубины развития ситуации раз- бивается на несколько подситуации, каждой из которых соответствует свой алгоритм управления. Каждая подситуаг ция идентифицируется блоком 10, При этом информация поступает от первых iH вторых порогов элементов блока 9 ;как Дополнительная комбинация к той, которая уже была использована для идентификации ситуации. Если глубина
развития ситуации изменяется, что фиксируется новой комбинацией сраба - тываемых порогов элементов блока 9, то осуществляется дискретнбй переход от одной подситуации к другой. Однако управление в каждой подситуации осуществляется по анашоговому закону на основе текущей информации, поступающей от блока 13, который содержит все необходимые датчики для идентификации ситуаций, подситуации и расчета управлякяцих воздействий.
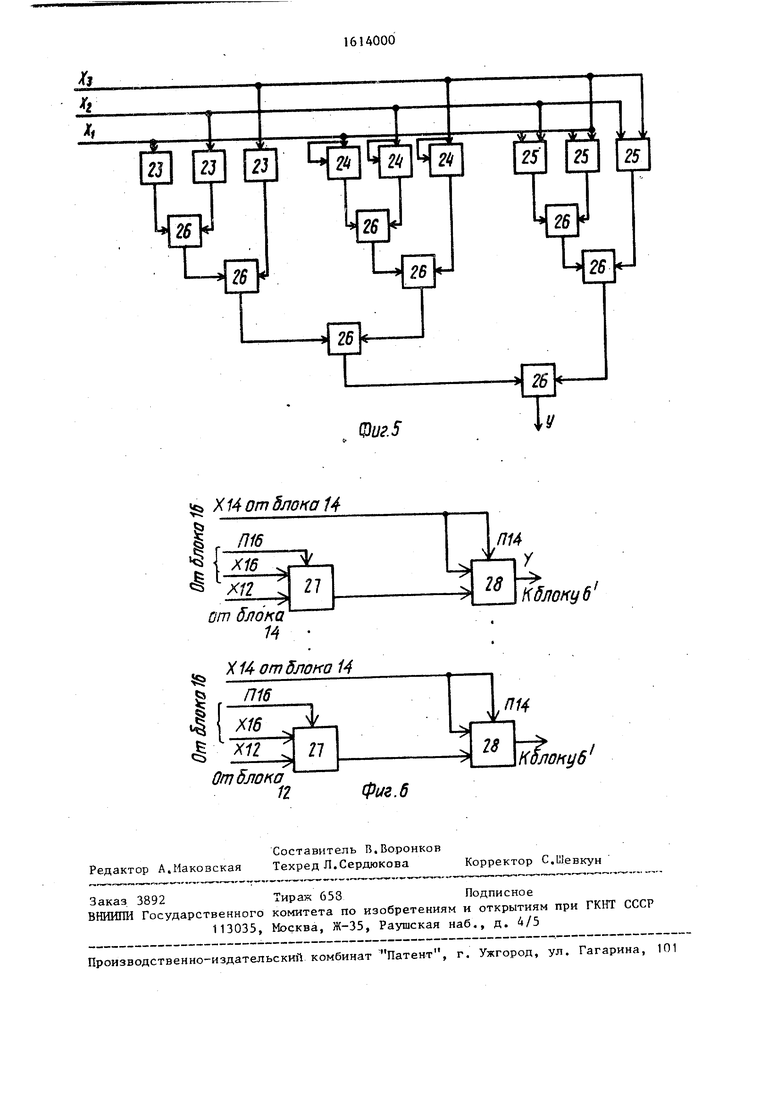
Сигналы от блока 13 поступают в блок 12 и размножаются по количеству подблоков 21 управления ситуациями, Сигналы от датчиков поступают в подблоки 21 через каналы 20, Если в блоке идентифицируется данная ситуация, то через блок 11 ключей,происходит открывание соответствующих клапанов 20, и сигналы датчиков поступают в соответствующий подблок 21, Остальные подблоки 21 не работают, и клапаны 20, пропускающие в них сигналы, . закрыты, В каждом подблоке 21 имеются вычислительные модули 22, общее количество которых равно количеству управляющих воздействий. На фиг,5 приведен пример универсального его исполнения для следующих видов зависимостей:
у аХ + ЬХ + с;
у а,Х, + & + Ь,Х2 + + d; ,.,
у а( + aj.-i. + 33X3 + b,X + + bj,X2 + + + .Хз +
+ + d,
где: у - выходной сигнал (управление
X - сигнал на входе в блок (параметр) ;
а, Ъ, с, d - настроечные коэффициенты.
При этом модуль 22 реализует зависимость первого вида при подключении одного входа в него, зависимость второго вида пр подключении двух входо и зависимость третьего вида при подключении трех входов. Приведенными зависимостями могут быть описаны управления для очень широкого класса объектов. Показанный принцип его. построения может быть также использован .для получения математических з.а- висимостей другого рода.
Коммутатор 17 представляет собой набор приборных узлов, общее. количество которых равно количеству управляющих каналов.
1614000
Схема коммутатора работает следу шим образом;
Если П,, О и П (4
4
Если П,6 1 и П Если О и Если 1 и П
то у то у
14
О,
О,
1, то у
1, то у
X
X
Ml 46
Н
44Ю1
Таким образом видно, что оператор роцесса через панель может сигна ом отключить автоматическое си™ уационное управление по любому кана у и управлять вручную (X g ) . При рабатывании блока 14 аварийной защиы процесса () в управляющий ка- ап у поступает сигнал . только т системы защиты, отсекая возмож :- ость автоматического и ручного уп авления процессом. Очевидно, что игналы и П44. равны между собой. ормула изобретения
Система ситуационного управления, содержап1ая блок датчиков глобальных параметров, блок обнаружений наруше 10
15
20
НИИ, М исполнительных органов и П уз-25 лов идентификации нарушений и выработки управляющих воздействий. из которых включает блок двухпорого- вых элементов, блок классификации нарушений, блок ключей, блок датчиков JQ частных параметров, блок индикации и панель управления режимом, управляющий вход.которой соединен с управляющим входом блока ключей, группа информационных входов которого связана с первой группой выходов.блока классификации нарушений, вто рая группа- выходов которого подключена к первой группе входов блока индикации, а группа входов подключена к первой
группе выходов блока двухпороговых элементов, группа информационных вхо дов которого соединена с группой выходов блока датчиков частных парамет ров, выход блока датчиков глобальных параметров связан с входом блока обнаружения нарушений, отличаю- щ а.я с я тем, что, с целью повышения точности управления и степени соответствия управляющих воздействий возникающим в работе объекта нарушениям, в систему введены блок организации перебора возможных нарушений, N-1 групп нуль-органов, 11-1 групп элементов ЗАПРЕТ и М блоков переклю - чения, а в каждый узел идентификации нарушений и выработки управляющих воздействий введены блок расчета уп
5
0
5 JQ
JO
равляющих сигналов, блок аварийной зашиты и коммутатор, первая группа управлякицих входов которого соединена с группой управляющих выходов панели управления режимом, вторая группа управляющих входов - с первой группой выходов блока аварийной защиты, первая группа информационных входов - с группой информационных выходов па нели управления режимом, а вторая группа информационных входов - с группой выходов блока расчета уп- равляк1дих сигналов, первая и вторая группы входов которого связань с группами выходов блока ключей и бло-. ка датчиков частных параметров, вторая группа выходов блока аварийной защиты подключена к второй группе входов блока индикации, а группа входов - к второй группе выходов блока двухпороговых элементов, управляющий вход которого является входом узла, вход блока организации перебора возможных нарушений соединен с выходом блока обнаружения нарушений, а выход - с входами всех узлов идентификации нарушений и выработки управлянг- щих воздействий, группа выходов первого из которых связана с входами нуль-органов первой группы и с управляющими входами соответствующих блоков переключения, группы выходов всех узлов идентификации парушения и выработки управляющих воздействий, кроме первого, подключен. к прямым входам элементов ЗАПРЕТ первой группы, инвертирующие вход1 1 которых соединены с выходами соответствующих нуль-органов первой группы, выходы элементов ЗАПРЕТ i-й групга, связат-. с входами нуль-органов (1+1)-й группы, кроме элементов ЗАПРЕТ (Н-1)-й группы, и с управляющими вводами соответствуюших блоков переключения, пря№1е входы элеме.нтов ЗАПРЕТ всех i-x групп, начиная с второй, подключены к выходам соответствующих элементов ЗАПРЕТ (i-l)-x групп, а инвентирующие входы Iэлементов ЗАПРЕТ всех i-x групп, на- :чиная с второй, соединены с выходамн «соответствующих нуль-органов (i-l)-x групп, информационные входы блоков переключения являются входами систе- для подачи стабилизирующих сигналов, а их выходы связаны с входами соответствукщих исполнительных органов.
Фиг,.г
Кблокам б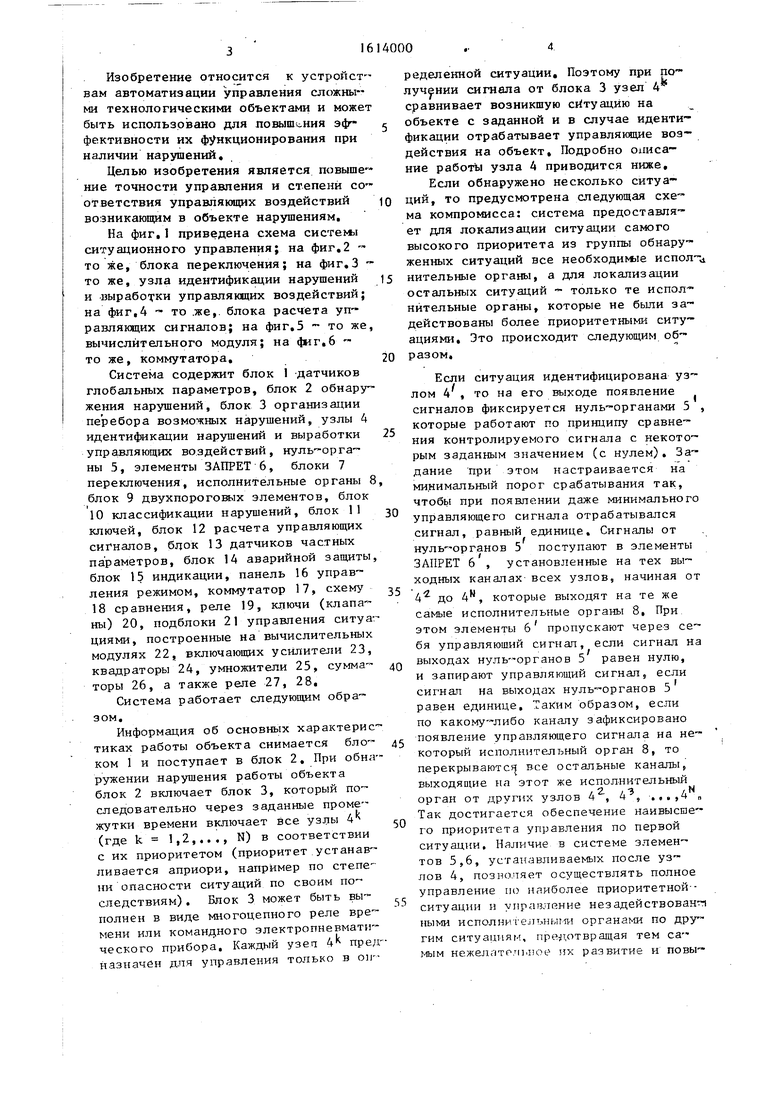
| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СЛОЖНЫМ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 2000 |
|
RU2178578C1 |
| Устройство для предупреждения аварий-НыХ СиТуАций | 1979 |
|
SU840818A1 |
| Устройство для выбора объекта управления | 1977 |
|
SU673990A1 |
| Устройство для идентификации нелинейных систем | 1976 |
|
SU638919A1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2002 |
|
RU2223527C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Отказоустойчивая система управления газоперекачивающим агрегатом | 1988 |
|
SU1629580A1 |
Изобретение относится к устройствам автоматизации управления технологическими объектами и может быть использовано для повышения эффективности их функционирования в условиях нарушений. Цель изобретения - повышение точности управления и степени соответствия управляющих воздействий возникающим в объекте нарушениям. Система содержит блок 1 датчиков глобальных параметров, блок 2 обнаружения нарушений на объекте, блок 3 организации перебора возможных нарушений, узлы 4 идентификации нарушений и выработки управляющих воздействий, нуль-органы 5, элементы ЗАПРЕТ 6, блоки 7 переключения и исполнительные органы 8. Система обеспечивает такое распределение исполнительных органов для ликвидации нарушений на объекте, которое обеспечивает наивысший приоритет более опасным отклонениям. 6 ил.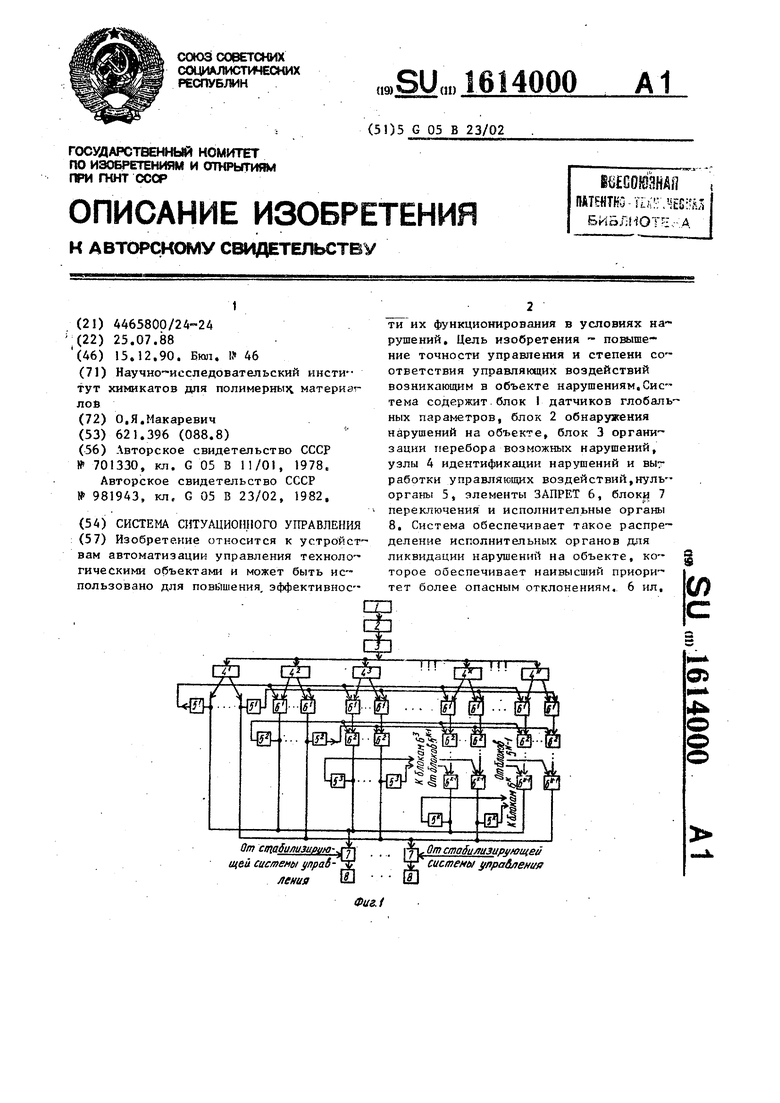
Offi блока 3
Фи1.4
К Злаку П
| Авторское свидетельство СССР 701330, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматизированного управления объектом | 1981 |
|
SU981943A1 |
