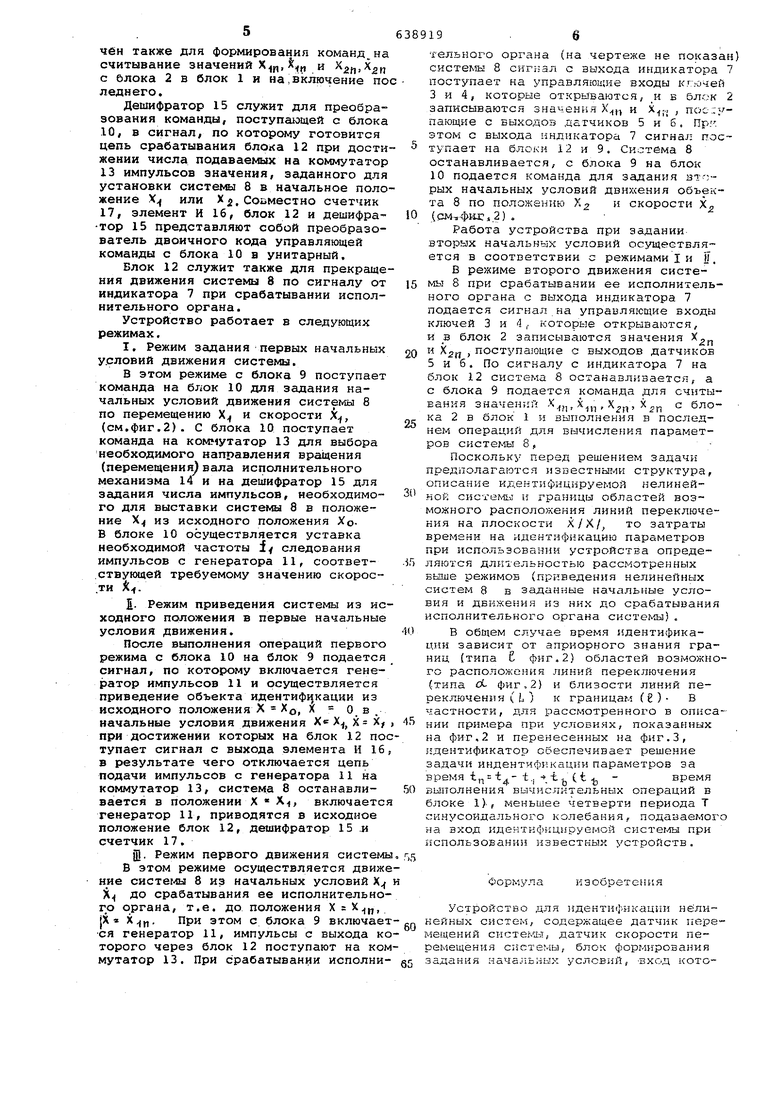
Изобретение относится к автоматик и может быть использовано при экспериментальных исследованиях систем автоматического управления и регулирования, а именно, для экспериментал ного определения параметров нелинейных систем, а также может быть испол зовано при организации адаптивного управления, при испытаниях систем управления и при контроле их технического состояния. Известны устройства для идентификации, содержащие формирователь воздействия на объект и блок наблюдения реакции объекта на пробное воздействие, например датчик перемещения и датчик скорости перемещения ij. Известно устройство для идентификёции динамических систем, содержаще в качестве формирователя воздействия генератор пробных синусоидальных сиг налов, цепи подстройки двух параметров, интеграторы, форсирующие звенья и фазовые детекторы 2. Однако облас практического использования этого устройства ограничена, во-первых, объектами идентификации, описываемыми линейными дифференциальными уравнениями, в которых неизвестны.ми явля ются два параметра, характеризующие демпфирование и резонансную частоту индентифицируемой системы, и, вовторых, процесс ид1ентификации двух иског-пах параметров требует затрат времени, не меньших чем один период входного синусоидального С11гнала. Наиболее близким к изобретению по технической сущности является устройство для идентификации нелинейных систем, содержащее датчик перемещения системы, датчик скорости перемещения системы, блок формирования задания начальных условий, вход которого соединен с первым выходом блока управления ,, первый выход - через последовательно соединенные генератор импульсов , блок формирования сигнала переключения и коммутатор соединен с исполнительНЕзМ механизмом, второй выход через блок управления соединен с вторым входом генератора импульсов, третий выход соединен с вторьм входом коммутатора; а четвертый выход через последовательно соединенные дешифратор и элемент i соединен с вторым входом блока формирования сигнала переключения, третий вход которого соединен с вторым входом блока управления, а выход через счетчик соединен с вторъил входом элемента И Гз . Оунк ииональные возможности этого устройства ограничены из-за отсутствия в нем обратных связей с объектом иден нфикации, а это исключает воз(южнос автоматизации процесса идентификации и приводит к допоянительн : затратам времени на ее проведение. Целью изобретения является поззышение быстродействия устройства. Достигается это тем, что в устрой стве установлены первый и второй ключи, блок памяти, блок вычисления параметров системы и индикатор сраба тывания исполнительного органа систе мы, первый выход которого соединен с вто{НЛ4 входом блока управления, а второй выход - с управляквцими входами первого и второго ключей, вхолты которых соединены соответственно, с выходами датчика перемесаения системы и датчика скорости перемещения системы, а выходы с соответствукняими Входами блока памяти, выход соединен с в срдом блока вычисления параметров с йгстемн, управлякяций вход которого соединен с третьш выходом блока управления и управлякяцим входо блока памяти. На фиг. 1 представлена блок-схема устройства; на фиг, 2 и 3-фазовые :графики исследуемых нелинейных систем. Устройство для идентификации нели ;нейннх систем содержит блок 1 вычис,пения параметров системы блок памяти 2, первый и второй ключи 3 и 4, датчик 5 перемещения системы, датчик б скорости перемещения системы, индикатор 7 срабатывания исполнитель ного органа системы, нелинейную систему 8, блок управления 9, блок 10 формирования задания начальных условий. Генератор импульсов 11, блок 12 формирования сигнала переключения, коммутатор 13, исполнительный механизм 14, дешифратор 15, элемент И 16 счетчик 17, На фиг. 2 и 3 приняты следующие обозначения: X и х - фазовые координаты системы; t - время; . - линии переключения; t - граница области переключения исполнительного органа системы; t - момент времени, соотве ствующий точке i на фиг. 2; -fe мент срабатывания исполнительного органа системы 8, соотвествующий точ Ke( , ) на фиг. 2, tj - момент времени, соответствующий точке 2 на фиг.2, t 4 момент срабатывания исполнительного органа системы 8, соответствующий точке (Хгп пХ В основу разработки устройства1 по ложено использование объективно суще ствующих связей между искомыми параметрами ct( м.) исйледуемых нелийейных систем, такими как запаздывание исполнительных органов и параметры статических элементов, и пара метрами линий переключения исполнительных органов, экспериментально построенных на фазовой плоскости. ИзвестноJ что линии перелючения являются гесметрическим местом точек азовой плоскости координат скорости ; и положения X, соответствующих моментам переключения исполнительных органов OHCTeivSd, Наличие указанных связей позволяет косвенным путем находить искомые параметры cL и d нелинейных систем посредством первоначального определения коэффициентов oi и t) линий переключения вида X ся + -Ьх и последующего расчета параметров ct и с1.2,связаннЕлх функциональной зависимостью с коэффициентами си и t)Коэффициенты « и t) линии переключения t (см.фиг.2) в процессе идентификации определяют в результате -последовательного задания системе движения с начальными условиялю, соответствунвдими точкам 1 и 2, близким к границе области переключения исполнительных органов, со значениями Х,Х и Х2, i-г ° ментёьм переключения исполнительных органов; -последующей регистрации (запоминании) пар значений Х, т и Х, , в моменты первого(., -fn и второго (К2. исполнительного органа - расчета коэффициентов а и Ъ линий переключения по соотношениям ., л ,„ л , л,, „ Д J Й ---5 Чй 2 - расчета искомых параметров ct, и (iy на основе решения уравнений (.(с«,Ъ) ctj-otjCa.b) Блок памяти 2 предназначен для запоминания значений перемещения ( Х)я скорости перемещения(X-ffj, Хги ) движения нелинейной систеьнл 8, соответствукиинх моментам срабатывания ее исполнительного органа и поступанмцих на блок памяти 2 с датчиков ,5 и б через ключи 3 и 4, управляемые сигналом с выхода индикатора 7, Блок 9 предназначен для управления процессом функционйровання устройства для индентифйкацик, С выхода блока 9 подаются сигналы на блок Ю для задания начальных условий движения систекш. При этом Х и «2 задаются с помощью установки соответствующих частот f и tz следования импульсов в генераторе 11, пропорциональных скорости вращения (перемещения) исполнительного механизма 14. Начальные значения Х и Х задаются путем установки нелинейкой систекм 8 на соответствующие углы .(перемещения) по командам, поступающим fc блока 10 на генератор 11, дешифратор 15 и коммутатор 13. Блок 9 преднаэначен также для формирования команд,на считывание значений , :,„ и с блока 2 в блок 1 и наiвключение по леднего. Дешифратор 15 служит для преобразования команды, поступающей с блока .10, в сигнал, по которому готовится цепь срабатывания блока 12 при дости жении числа подаваемых на коммутатор 13 импульсов значения, заданного для установки системы 8 в начальное поло жение Х или X5. Совместно счетчик 17, элемент И 16, блок 12 и дешифратор 15 представляют собой преобразователь двоичного кода управляющей команды с блока 10 в унитарный. Блок 12 служит также для прекращения движения системы 8 по сигналу от индикатора 7 при срабатывании исполнительного органа. Устройство работает в следующих режимах. I. Режим задания первых начальных условий движения системы. В этом режиме с блока 9 поступает команда на блок 10 для задания начальных условий движения системы 8 по перемещению Х и скорости Х, (см.фиг.2). С блока 10 поступает команда на коммутатор 13 для выбора необходимого направления вращения (перемещения вала исполнительного механизма 14 и на дешифратор 15 для задания числа импульсов, необходимого для выставки систе Фа 8 в положение Х из исходного положения ХоВ блоке 10 осуществляется уставка необходимой частоты i следования импульсов с генератора 11, соответствующей требуемому значению скорости 1. J. Режим приведения системы из исходного положения в первые начальные условия движения. После выполнения операций первого режима с блока 10 на блок 9 подается сигнал, по которому включается генератор импульсов 11 и осуществляется приведение объекта идентиф1 кацни из исходного положения , X О в. начальные условия движения при достижении которых на блок 12 пос тупает сигнал с выхода элемента И 16 в результате чего отключается цепь подачи импульсов с генератора 11 на коммутатор 13, система 8 останавливается в положении X Х, включается генератор 11, приводятся в исходное положение блок 12, дешифратор 15 .и счетчик 17. Щ. Режим первого движения системы В этом режиме осуществляется движе ние систег и 8 из начальных условий Х А до срабатывания ее исполнительного органа, т.е. до положения X Х, |Х , При этом с блока 9 включает ся генератор 11, импульсы с выхода ко торого через блок 12 поступают на ком мутатор 13. При срабатывании исполнительного органа (на чертеже не показан) системы 8 сигнал с выхода индикатора 7 поступает на управляющие входы кгючей 3 и 4, которые открываются, и Б блок 2 записываются значения Х. и .; , пос:;;.пающие с выходов датчиков 5 и 6, Пр этом с выхода индикатора 7 сигнал Пч-зступает на блоки 12 и 9. Система 8 останавливается, с блока 9 на блок 10 подается команда для задания зт---рых начальных условий движения объекта 8 по положению К2 н скорости Х (CM J-iCj 2) о Работа устройства при задании вторых начальных условий осуществляется в соответствии с режимами I и (Т, В режиме второго движения системы 8 при срабатывании ее исполнительного органа с выхода индикатора 7 подается сигнал на управляющие входы ключей 3 и 4,. которые открываются, и в блок 2 записываются значения Х и , поступающие с выходов датчиков 5 и 6. По сигналу с индикатора 7 на блок 12 система 8 останавливается, а с блока 9 подается команда для считывания значений X, с блом 1 in ка 2 в блок 1 и выполнения в последнем операций для вычисления параметров систеьол 8, Поскольку перед решением задачи предполагаются известными структура, описание идентифицируемой нелинейной системы и границы областей возможного расположения линий переключения на плоскости Х/Х/ то затраты времени на идентнф15кацию параметров при использовании устройства определяются длительностью рассмотренных выше режимов (приведения нелинейных систем 8 в заданные начальные условия и движения из них до срабатывания исполнительного органа системы), В общем случае время идентификации зависит от априорного знания границ (типа С фиг,2) областей возможного расположения линий переключения (типа оС фиг.2) и близости линий переключения ( L ) к границам (С)- В частности, для рассмотренного в описаj.jjj примера при условиях, показанных на фиг,2 и перенесенных на фиг.З, идентификатор обеспечивает решение задачи индентификациипараметров за время 1 ., . Сt-j, время выполнения вычислителр ных операций в блоке меньшее четверти периода Т синусоидального колебания, подаваеьгаго на вход идектифицируемой систе1лл при пспользовании известных устройств. изобретения Формула Устройство для 1дентификации нелинейных систем, содержащее датчик перемегцений cHGTe;vja, датчик скорости перемещения системы, блок форг-итрования задания начальных условий, -вход кото
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации нелинейных систем | 1980 |
|
SU960745A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Беспоисковое управляющее устройство | 1978 |
|
SU798702A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для моделирования электронных схем | 1977 |
|
SU734700A1 |
| Устройство для циклового программного управления | 1983 |
|
SU1233104A1 |
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| Система ситуационного управления | 1988 |
|
SU1614000A1 |
