Изобретение относится к транспортирующим устройствам, в частности к оборудованию печей с шагающими балками, имеющими две группы подвижных балок, и может быть использовано в металлургической машиностроительной, и других областях промышленности.
Целью изобретения является упропдение конструкции и повышение надежности работы механизма.
На чертеже изображена 9хема механизма вертикального перемещения.
Механизм включает подвижные балки 1 одной группы и второй группы 2, опирающиеся на опорные катки 3, посаженные с возможностью вращения на штоки гидроцилиндроь подъема 4 и штоки 4 уравно- вещивающих гидроцилиндров 5.
Уравновешивающие гидроцилиндры 5 каждой группы балок попарно соединены трубопроводом 6 друг с другом и через обратный клапан / с подпиточным баком 8 Каждая пара гидроцилиндров подъема 4 входяцдая в обе группы балок, через гид- рораспределители 9 (Р,;Р,) соединяется с дополнительными гидроцилиндрами 10 соот ветствующей насосной секции 1. Каждая пара дополнительных гидроцилиндров соездне- на со своей насосной секцией
Все насосные секции соединяются через кривошипно-шатунные механизмы 12 имею - Щие общий коленчатый вал 13, с эпектроо:
rsD
00
;о
двигателем 14. При этом штоки дополнительных гидроцилиндров соединены с электродвигателем 14 посредством коленвала таким образом, что они постоянно находятся во взаимно обратном положении, причем полости гидроцилиндров подъема попарно через гидрораспределительную аппаратуру соединены с полостями дополнительных гидроцилиндров 10, рабочий объем которых в два раза меньше объема гидроцилиндров 4 подъема. Дополнительные гидроцилиндры 10 насосных секций 11 соединены через гидроканалы 15 (Ki...K4) с подпиточным баком 8.
Гидроклапаны 15 и гидрораспредсли- тель 9 имеют электромагнитное управление. Электромагниты гидроклапанов на схеме обозначены УА и цифрой, соответствующей порядковому номеру гидроклапана. Электромагниты гидрораспределителей 9 (Pi;P2) обозначены УА5-УА8.
Для предохранения гидросистемы для перегрузки рабочие полости дополнительных гидроцилиндров каждой насосной секции соединены между собой посредством предохранительных клапанов 16 (КП1...КП4).
Количество ее насосных секций выбирается четным и соединены они между собой так, что штоки левых дополнительных гидроцилиндров нечетных секций выдвинуты, а четных вдвинуты.
Подвод каждого предохранительного клапана 16 соединен с одним из гидроцилиндров насосной секции, а отвод со вторым гидроцилиндром этой же насосной системы. Рабочие объемы и диаметры штоков всех уравновеп иваюших гидроцилиндров 5 равны.
При включенных электромагнитах УА1 - УА4 гидрок.дапаны 15 открыты и могут пропускать рабочую жидкость в обоих направлениях. При отключенных электрома1 нитах гид|юклапаны 15 могут пропускать жидкость только из подпиточпого бака 8.
Гидрораспределители 9 (Pi;Pa) при обесточенных электромагнитах находятся веред- нем положении и их золотник перекрывает все линии связи в соответствии с изображением в среднем квадрате условного изображения гидро)аспределителя.
При включении левых электромагнитов линии связи соединяются в соответствии со стрелками, изображенными в левом квадрате, и наоборот.
Механизм вертикального перемещения работает следующим образом.
Электромагниты УА1-УА4 включены, клапаны 15 (KJ-К4) открыты, электродвигатель 14 включен, насосные секции работают вхолостую, засасывая жидкость из подпиточного бака 8 и перекачивая ее обратно в бак.
По команде на начало движения в момент прохождения кривошипно-ползунного механизма через первую мертвую точку (поло
жение, показанное на схеме) электромагниты УА1 - УА4 обесточиваются, а УА5, УА7 включаются. Гидрораспределители 9 (Pi; Р2) устанавливаются в левое положение и
соединяют гидроцилиндры подъема 4 балок 1 с нагнетающими гидроцилиндрами насосных секций, а гидроцилиндры подъема 4 балок 2 всасывающими. За период поворота вала 13 на 180° происходит нагнетание рабочей жидкости в гидроцилиндры подъема 4 балок 1 и они поднимаются на половину хода. За этот же период происходит слив жидкости из гидроцилиндров 4 подъема балок 2 и они вместе с изделиями опускаются на половину хода. Таким образом, после пово5 рота вала 13 на 180° (во второй мертвой точке) балки 1 и 2 находятся на одном уровне (момент перекладывания изделий), а их мгновенная скорость равна нулю.
„ В этом положении электромагниты УА5, УА7 отключаются, УА6, УАЗ включаются, золотники гидрораспределителей 9 ( Р2) устанавливаются в гфавое положение и соединяют гидроцилиндры подъема 4 с противоположными гидроцилиндрами насосных сек- 5 ций так, что гидроцилиндры балок 1 соединяются как и в первой половине хода с нагнетающими, а балок 2 с всасываю-щими гидроцилиндрами насоснь х секций. Происходит подъем балок 1 изделием в крайнее верхнее заднее положение и опускание ба0 ;ioK 2 в крайнее нижнее переднее положение. Жидкость из уравновешивающих гидроцилиндров 5 балок 2 вытесняется в урав- нове1пивающие гидроцилиндры балок 1. Криво1пипно-ползунный механизм 12 со- верпшет полный оборот и проходит в первую
35 мертвую точку. Так как подача насосных секций синусоп.,аальна, то закон движения балок близок к равноускоренному с нулевой скоростью в начале, в середине и в конце хода. Происходит полный ход балок с плав40 иь1м разгоном и замед-лением в начале, в середине и в конце хода. т. е. обеспечивается оптимальный закон движения балок без ударных нагрузок при перек.шдывапии изделий. Это позволяет работать на более высоких скоростях без опасности разрушения
45 футеровки балок и деформации изделий. Горизонтальное перемещение балок 1 с изделиями вперед и балок 2 назад происходит при помощи механизма горизонтального перемещения. В это время включены электро у1агниты УА1-УА4 и отключены
50 УА6; УА8. Насосные секции работают вхолостую, а балки перемещаются по опорным каткам. Штоки гидроцилиндров подъема 4 удерживаются в неподвижном состоянии запертой гидрораспределителями (Pi; ) 9 жидкостью. Время горизонтального передвижения выбирается меньшим времени поворота Ba:ia 13 на полоборота. После окончания горизонтального перемещения, в момент прохождения криво1липно-ползунного
механизма через вторую мертвую точку, электромагниты УА1-УА4 отключаются, а УА5; УА7 включаются, происходит опускание балок 1 с изделием и подъем балок 2 на половину хода. В момент прохождения механизма через первую мертвую точку электромагниты УА5, УА7 отключаются, а УА6, УА8 включаются. Балки 1 и 2 совершают вторую половину хода. В момент прохождения механизма через вторую мертвую точку электромагниты УАЗ, УА7 отключаются, а УА1-УА4 включаются. За время холостого поворота вала 12 на полоборота механизм горизонтального перемендения передвигает балки 1 в заднее, а балки 2 - в переднее положение. Таким образом, вся система приходит в исходное положение, после чего цикл повторяется.
Возможны и другие режимы работы.
Например, с паузой в исходном положении. Во время паузы гидрораспределители 9 ( Рг) остаются в среднем положении (электромагниты УА5-УА8 отключены). а гидроклапаны 15 открываются (электромагниты УА1-У.А4 включены).
Для транспортировки изделий в обратном направлении необходимо в ручном режиме установить балки 1 в крайнее нижнее, переднее, а балки 2 в крайнее верхнее, заднее положение. Цикл отличается только тем, что после подъема балок 1 механизм горизонтального перемещения передвигает их назад, а опупхенные балки 2 - вперед.
Воз.можен режим без горизонтального передвижения или комбинированный, в котором горизонтальное перемещение проис.ходит через цикл.
Механизм вертикального перемещения для транспортирующих устройств с подвижными и стационарными балками работает аналогично, только в период подъема, когда гидроцилиндры подъема 4 соединены с нагнетающими полостями насосных секций, всасывающие соединяются через открытые гидроклапаны 15 с подпиточным баком 8. В период опускания, когда гидроцилиндры 4 соединены с всасывающими полостями насосных секций, с подпиточным баком через открытые клапаны 15 (К1-К4) соединены нагнетающие полости насосных секций.
Так как гидроцилиндры каждой насосной секции должны работать в противофазе со сдвигом на 180, то в ne.iHx ра.груз- ки коленчатого вала целесообразно количество насосных секций выбирать четным и располагать их так, чтобы все штоки ,ie- вых гидроцилиндров нечетных CCKHHI I находились в крайнем выдвинутом, а четных в крайнем вдвинутом но.южении, или наоборот. В этом случае равнодействующая всех радиальных сил будет равна нулю, п ва./1 бу дет нагружен только крутящим моментом.
Формула изобретения
0
1..еханизм вертикального перемещения двух rpyiin подвижных балок, содержащий
5 гидроцилиндры , гидроцилиндры уравновешивания с закренленными на нгго- ках опорными катками, насосные секции о электроприводом, гидрорас предел ите,1ьн у ю аппаратуру, иодпиточный бачок, отличающийся тем, что, с це,1ью упроихения кон0 струкции и иовышения надежности работы механизма, штоки гидроцилиндров под ьсма обеих групп балок соединены с опорными катками, а насосная секция выпо,1нена в виде дополнительных гидроцилиндров, што5 ки которых соединены с электродвигате.чем посредством коленвала таким образом, что они постоянно находятся во взаимно обратном положени -;, при этом по, юсти 1 ид- роцилиндров попарно через гид))- распределительную аннаратуру соединеЩ) с
0 полостями дополните,|ьных гидроцилиндров, при этом рабочий объем последних в два раза меньше об ьема гидроцилиндров под ь- ема.
2.ЛАеханизм но п. 1, отличающийся тем, что рабочие полости дополните.пьных 1 ид5 роцилиндров насосных секций соединены с подниточным баком Н1)средством обратных управляемых гидрок, 1апанов.
3..У1еханизм по п. 1. отличающийся тем. что, с целью предохранения гидросистемы от перегрузки, рабочие по,пости , 1ните,1Ь- ных гидроцплиндров каждой насосной секции соединены между собой посредством предохранительных клапанов.
4.Механизм по п. 1, отличающийся тем, g что количество насосных секций выбирается четным и соединены они между co6oii так, что 1НТОКИ левых допо, 1нительных гидроцилиндров нечетных секций выдвинуты, а четных ВДВИНУТЫ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ ЗВЕНЬЕВ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1998 |
|
RU2154708C2 |
| БАШЕННЫЙ КРАН С УСТРОЙСТВОМ НАРАЩИВАНИЯ БАШНИ И УСТРОЙСТВО НАРАЩИВАНИЯ БАШНИ | 2005 |
|
RU2314249C2 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
| Судовое аппарельное устройство | 1982 |
|
SU1043068A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СУДОВ | 1993 |
|
RU2067061C1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1975 |
|
SU613039A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| ЧЕЛЮСТНОЙ ТРАКТОРНЫЙ ПОГРУЗЧИК | 1968 |
|
SU218730A1 |
| ГИДРОПРИВОД ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2021 |
|
RU2779011C1 |
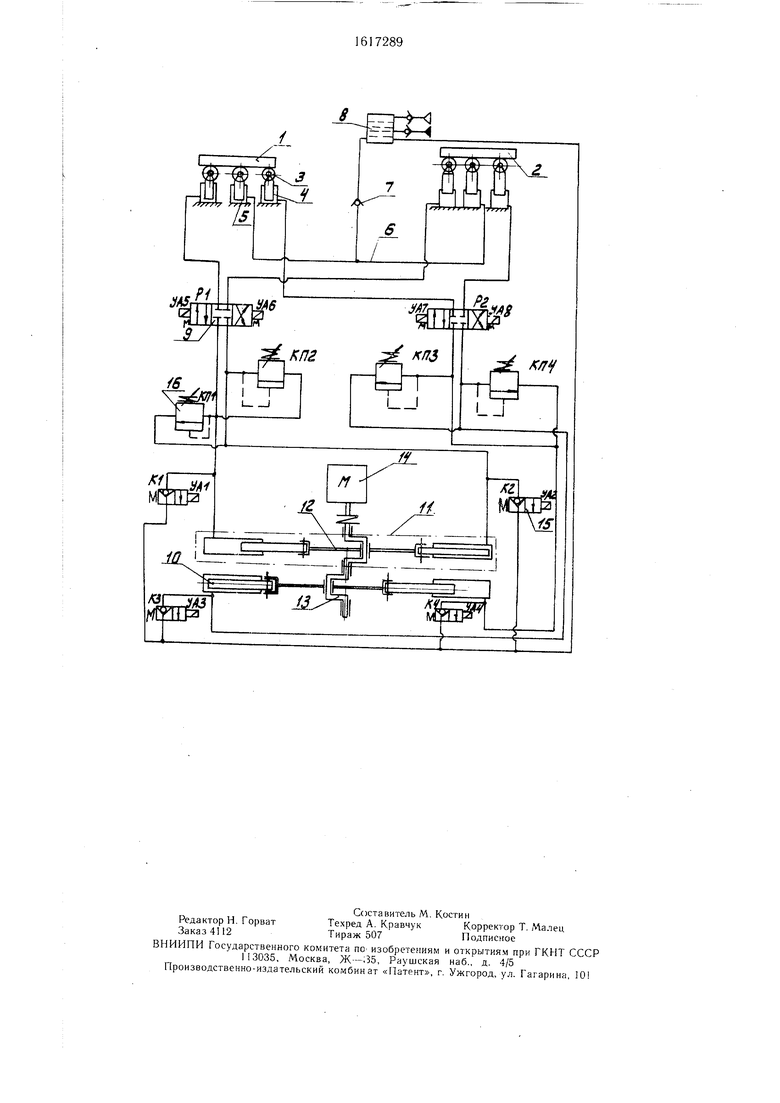
Изобретение относится к печам с шагающими балками, имеющим две группы подвижных балок и может быть использовано в металлургической, машиностроительной и других областях промышленности. Цель изобретения - упрощение конструкции и повышение надежности работы механизма. Механизм вертикального перемещения содержит подвижные балки 1 одной группы, подвижные балки 2 другой группы, которые опираются на опорные катки 3, закрепленные с возможностью вращения на штоках гидроцилиндров 4 подъема и уравновешивающих гидроцилиндрах 5. Уравновешивающиеся гидроцилиндры каждой группы балок попарно соединены с трубопроводом 6, а через обратный клапан 7-с подпиточным баком 8. Каждая пара гидроцилиндров подъема через гидрораспределитель 9 соединяется с дополнительными гидроцилиндрами 10, каждая пара которых соединена со своей насосной секцией 11. Все секции соединены через кривошипно-шатунные механизмы 12, имеющие общий коленчатый вал 13, с электродвигателем 14. Дополнительные гидроцилиндры 10 соединены через гидроклапаны 15 с подпиточным баком 8. Насосные секции предохраняются от перегрузок предохранительными клапанами 16, подвод каждого из которых соединен с одним из дополнительных гидроцилиндров, а отвод- с другим этой же насосной секции. Рабочий объем дополнительных гидроцилиндров 10 в два раза меньше чем гидроцилиндров подъема. 3 з.п. ф-лы, 1 ил.
| Механизм подъема шагающих балок | 1976 |
|
SU718682A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
