При движении изоляционно-укладочной колонны по пересеченной местности для поддержания технологических высот трубопровода периодически возникает необходимость изменения стабилизируемого диапазона на каждом из трубоукладчиков, связанная с непрерывным изменением как высотного, так и углового положения трубоукладчиков в пространстве.
Оператор, воздействуя на задатчик 3 стабилизируемого диапазона нагрузки на крюке (РЗ) (фиг. 1), изменяет выходной сигнал задатчика 3, при этом выходной сигнал датчика 1 действительной нагрузки (РД) всегда пропорционален текущему значению действительной нагрузки на крюке, а выходной сигнал датчика 8 грузового момента (МГ) пропорционален грузовому моменту от действующей на крюке нагрузки относительно ребра опрокидывания трубоукладчика. Изменение поперечного наклона трубоукладчика приводит к изменению момента устойчивости, причем величина давления в штоковой полости гидроцилиндра и выходной сигнал датчика 9 (МУ) пропорциональны текущему значению момента устойчивости.
В случае превышения сигнала задатчика 3 над сигналом датчика 1 текущей нагрузки на крюке на выходе порогового элемента
16формируется электрический сигнал, поступающий на вход логическому элементу
17типа И, однако выходной сигнал с логического элемента 17 появится лишь в том случае, если на второй из его выходов придет сигнал с порогового элементл 15, соответствующий превышению сигнала датчика 9 момента устойчивости над сигналом датчика 8 грузового момента (фиг. 2, вариант 1). Выходной сигнал логического элемекта 17 после усиления его усилителем 19 запиты- вает электромагнит 21 который в свою очередь,перемещаязолотник электрогидрораспределителя 22 в положение, соединяющее напорную гидромагистраль через гидроклапан 24 с гидроцилиндром 5, включает грузовую лебедку 6 на подъем крюка.
Подъем трубопровода осуществляется до тех пор, пока сигнал датчика 1 действительной нагрузки на крюке не станет равным сигналу задатчика 3 cтaбилизиpveмoгo диапазона (вариант 2) или сигнал датчика 8 грузового момента станет равным сигналу датчика 9 момента устойчивости (вариант 4). Равенство входных сигналов в блоке 10 (или 11) сравнения приведет к исчезновению выходных сигналов релейных элементов 15 и 16, а также выходного сигнала логического элемента И 17, что приведет к обесточиванмю элею ромагни а 21, возврату золотника гидрораспределителя 22 в нейтральную позицию, соединению поршневой полости гидроцилиндра 5 со сливом и, как следствне, останову барабана грузовой лебедки 6
В случае превышения сигнала датчик 1
текущей нагрузки на крюке над сигналом
яадатчика (вариант 3, 6 и 9) или в случае
превышения сигнала датчика 8 грузового
0 момента над сигналом датчика 9 момгнта устойчивости (вариант 7, 8 и 9) на выходе пороговых элементов 12 или 13 появляется сигнал, поступающий на один из входов (или нз оба входа одновременно) логического
5 элемента ИЛИ 14, вызывая появление сигнала на его выходе, который после усиления усилителом 18 запитывает электромагнит 20, который в свою очередь, перемещая зо- лсгник гидрораспределителя 22 в положе0 иие, оединя ющеенапорную
гидрома истрать через гидроклапан 23 с г.;дроцилиндпом 4, включает грузовую лебедку б на опускание крюка.
Опускание трубопровода продолжается
5 до тех пор пока сигналы згдатчика 3 и датчика 1, а также датчиков 9 и 8 не станут одновременно соответственно равны друг другу (вариант 5) или соответствующим об- рэзсм превышать друг друга (вариант 2 и 4)
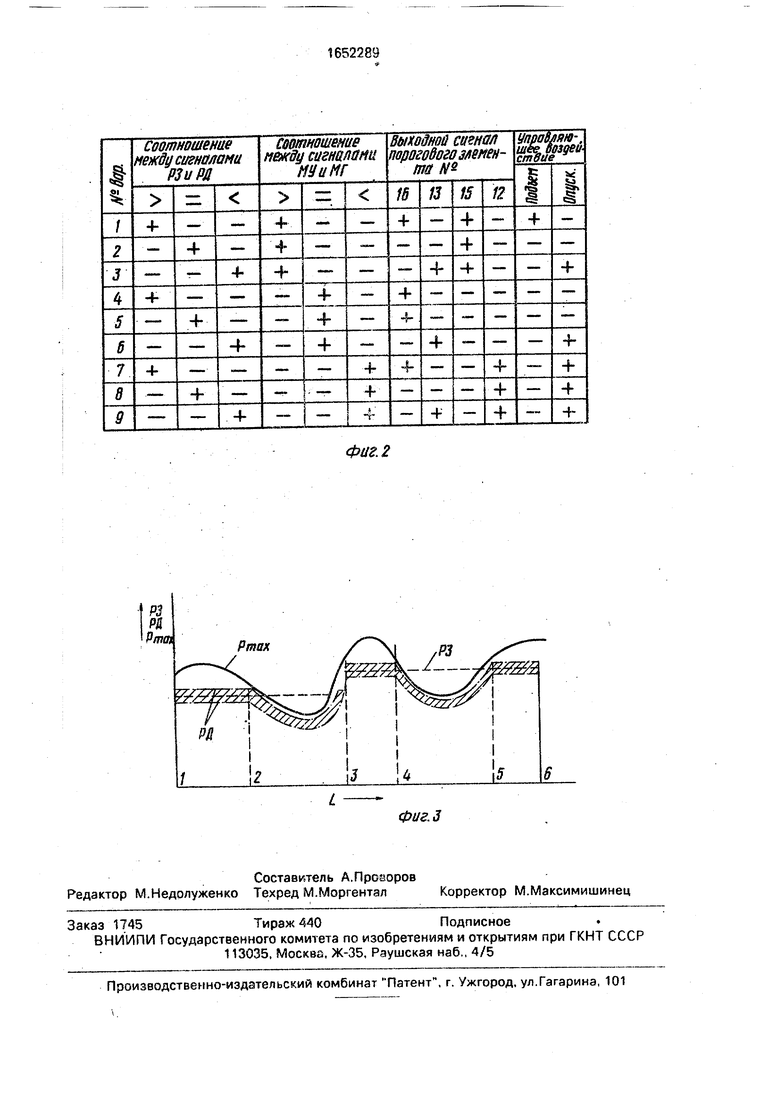
0Таким образом, при движении трубоукладчика в составе укладочной колонны по пересеченной местности действительная величина нагрузки на крюке (РД) находится в диапазоне, соответствующем величине за5 данной нагрузки (РЗ) (фиг. 3) в случае, если величина заданной нагрузки не превышает величины допустимой нагрузки на крюк из условия грузовой устойчивости Рмакс, непрерывно меняющей свое значение под
0 действием непрерывного изменения как направления действия нагр/зки на крюке, так и поперечного наклона самого крана при его перемемг-нии вдоль траншеи (участки 1-2, 3-4 и 5- : В случае превышения задан5 ной нагрузки (РЗ) над допустимой Рмакс действительная величина нагрузки (РД) удерживается Е диапазоне, соответствующем заданному коэффициенту грузовой устойчивости (участки 2-3 и 4-5).
0Дтк работы трубоукладчика в режиме
крана : таточно отключить питание устройстве переключением тумблера на лицевой пан.ли блока управления.
Прей существом устройства авюмати5 ческого управления грузовой лебедки трубоукладчика является стабилизация нагрузки на крюке в диапазоне, соответствующем требуемому запасу грузовой устойчивости в случае превышения заданного диапазона стабилизации над допустимой
нагрузкой на крюк из условия грузовой у,; тойчивости.
Это преимущество позволяет значительно повысить- величину стабилизируемой Н3|рузки на крюке с сохранением требуемой безопасности укладочных работ, что повысит эффективность их использования путем уменьшения необходимого количества трубоукладчиков в колонне.
Формула изобретения
Устройство для автоматического управления грузовой лебедкой трубоукладчика, содержащее датчик нагрузки, связанный с грузовым канатом, датчик грузового момента, задатчик стабилизируемого диапазона, исполнительные гидроцилиндры управления грузовой лебедкой, связанные с еыхо дами гидрораспределигеля, с ручным управлением через гидроклапаны ИЛИ и гидрораспределитель с управлением от электромагнитов, отличающееся тем,
что. с целы;) улучшения эксплуатационных хлрактеригтик, оно снабжено датчиком момента устойчивости трубоукладчика, блоками сравнения с пороговыми элементами,
ло и--е,кими элементами ИЛИ и И и усилителями, при этом эпектри .еские выходы дат- чи.сз грузового момента и датчика момента ус.ойчивости трубоукладчика связаны с первым блоком сравнения, выходы датчика
нагрузки и задатчика стабилизируемого ди- ап ;зона - с вторым блоком сравнения, элек- rpiческие выходы первых пороговых элементов КРЖДОЮ из блоков сравнения свячаны г логическим элементом ИЛИ, а вторых пороговых элементов - с логическим элементам И, выходы указанных логических элементов через соовтетствуюшие усилители связаны с соответствующими электромагнитами гидрораспределигеля, гидравлические
выходы которого сообщены через упомянутые гидроклапаны ИЛИ с исполнительными гидроцилиндрами параллельно гидрораспре- делигелю с ручным управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство для предотвращения опрокидывания стреловой грузоподъемной машины на гусеничном ходу | 1985 |
|
SU1291533A1 |
| Устройство для управления приводами подъма груза и стрелы крана-трубоукладчика | 1990 |
|
SU1791345A1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| Устройство управления машиной для регенерирования и уплотнения асфальтобетонных покрытий | 1989 |
|
SU1620523A1 |
| Способ управления движением трубоукладчиков в колонне | 1988 |
|
SU1703608A1 |
| Гидропривод крана-трубоукладчика | 1970 |
|
SU802170A1 |
| Гидросистема грузоподъемного крана | 1991 |
|
SU1765542A1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ НА СТРЕЛУ ТРУБОУКЛАДЧИКА | 1965 |
|
SU177056A1 |
| Гидросистема грузового крана | 1989 |
|
SU1689673A1 |
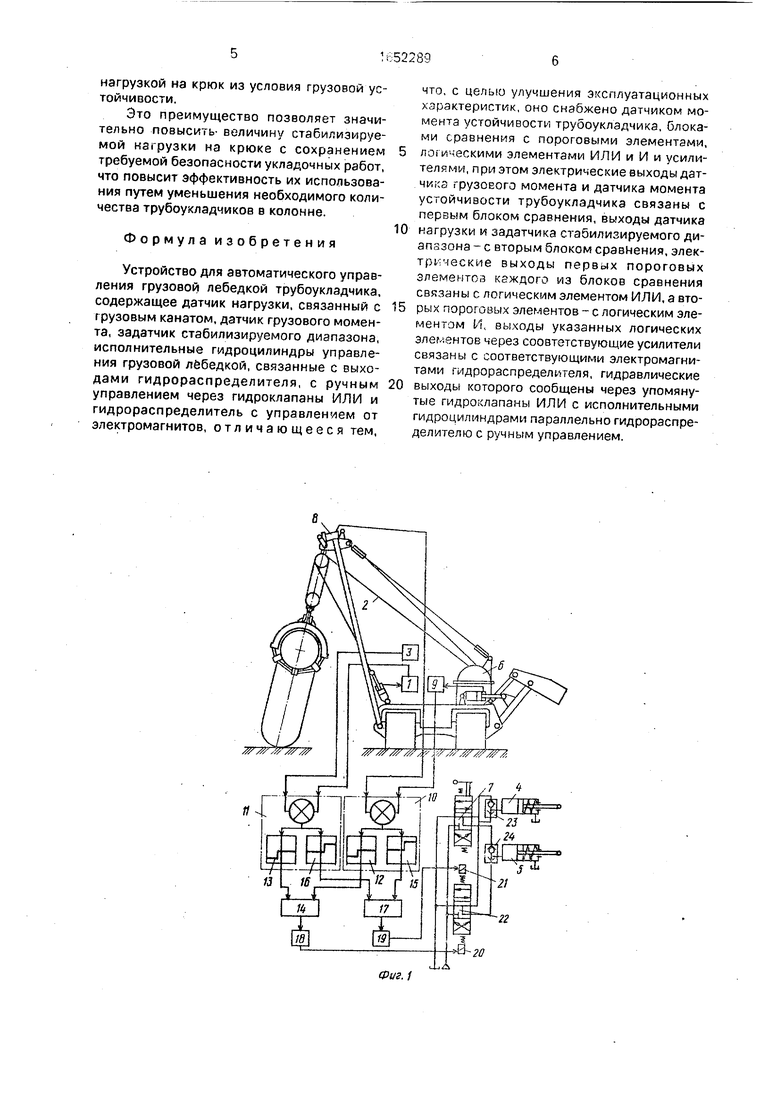
Изобретен, е относится к подъемным устройствам, а именно к управлению лебедкой для ограничения опрокидывающего момента трубоукладчика. Цель изобретения Изобретение относи ген к подъемным устройствам,а именно к управлению лебед кой для ограничения опрокидывающего мо- ментт трубоукладчика. Цель изобретения - улучшение эксплуатационных характеристик. На фиг. 1 изображена схема устройства автоматического управления грузовой лебедкой трубоукладчика; на фиг. 2 - таблица состояний устройства; на фиг 3 - диаграмма изменения нагрузок на крюке в зависимости от движения трубоукладчика по пересеченной местности. Устройство автоматического упрйгле- ния грузовой тебедкой содержит датчик 1 нагрузки на крюке, связанный с грузовым канатом 2, задатчик 3 стабилизируемого диапазона нагрузки, исполнительные гидроцилиндры 4 и 5 управления грузовой лебедкой 6, соединенные гидролиниями с ручным гидрораспределителем 7 датчик 8 улучшение эксплуатационных характеристик. Превышение сигнала задатчика 3 над сигналом датчика 1 при условии превышения сигналом датчика 9 сигнала датчика 8 ведет к появлению выходных сигналов у по- ро овых элементов 15 и 16, выходного сигнала у логического элемента И 17, усиления его в усилителе 19 и включению электромагнита 21 перемещающего золотник.гидро- ,аспределителя 22 в позицию, соединяющую напорную гидромагистраль с п дроцит ндром 5 через гидроклапан 24 ИЛИ, включая 1 см самым лебедку 6 на подьем крюка. Опускание крюка осуществляется в случае превышения сигнала дагника 1 над сигналом зтцэтчикг: 3 или при превышении сигнала датчика 8 над сигналом датчика 9. 3 ил. грузового момента и датчик 9 момента устойчивости трубоукладчика. Электрические ьыходы датчиков 8 и 9 связаны с первым блоком 10 сравнения, а датчика 1 нагрузки и задатчика 3-е вторым блоком 11 сравнения. Электрические выходы первых пороговых элементов 12 и 13 соответственно первого и второго блоков 10 и 11 сравнения связаны с логическим элементом 14 типа ИЛИ, а электрические выходы вторых пороговых элементов 15 и 16 связаны с логиче-, ским элементом 17 типа И, электрические выходы логических элементов 14 и 17 через усилители 18 и 19 связаны соответственно с электромагнитами 20 и 21 управления зо- /ютни ом электрогидрораспределителя 22, связанного :идролиниями через гидрокла- 23 и 24 ИЛИ с исполнительными гидроцилиндрами 4 и 5 параллельно ручному гидрораспределителю 7 Устройство работает следующим образом сл С о сл ю ю 00 ю
Фиг. 2
| Устройство для автоматическогоКОНТРОля гРузОВОгО МОМЕНТАгидРАВличЕСКОгО KPAHA-ТРубОуКлАдчиКА | 1978 |
|
SU796183A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
